

Якість керування.
Стійкість САУ характеризує можливість виконання поставленой перед системою завдання керування в принципі, але не дає відповіді на питання про якість її виконання. Стійкі САУ працездатні, але проте необхідно, щоб процес керування здійснювався при забезпеченні певних якісних показників.
У стійких САУ перехід від одного сталого стану до іншого сталого стану, залежно від значень конструктивних параметрів системи може происходств за різний інтервал часу. Характеризуватися різними динамічними й статичними (сталими) помилками, здійснюватися монотонно або з певною кількістю коливань щодо нового сталого стану.
Зазначені властивості, як і деякі інші, у цілому визначають якість процеса керування. При всьому їхньому різноманітті можна виділити трохи найбільш істотних, які з найбільшою повнотою визначають якість керування майже для всіх САУ.
Найбільше повно відбивають якість керування прямі показники якості, які визначаються в основному по виду перехідної характеристики.
Прямі показники якості
До основних показників якості керування можна віднести наступні
час керування;
перерегулювання;
колебательность;
стала (статична) помилка.
При цьому слід зазначити, що в деяких випадках до якості керування можуть застосуються й інші вимоги, наприклад максимальна швидкість зміни керованої величини, основна частота коливань й ін.
Розглянемо основні показники якостей керування в системі, структурна схема якої наведена на малюнку.
Н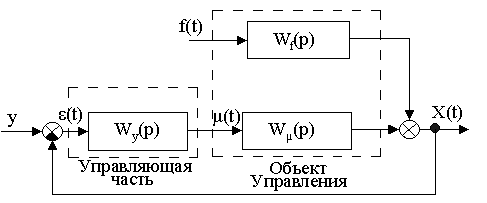 а
цьому малюнку позначено:
а
цьому малюнку позначено:
в- вплив, що задає;
х (t)- фактичне значення керованої величини (вихідна величина);
f(t)- зовнішній вплив, що обурює;
?(t)- керуючий вплив
![]() (t)-помилка
керування,
(t)-помилка
керування,
![]() ;
;
Wy(p)- передатна функція керуючої частини САУ.
Wf(p) і Wм(р) - передатні функції обьекта керування по каналах збурювання відповідно.
Реально в розглянутій системі діють два вхідних впливи: що задає й обурює f(t). У лінійних системах керування при аналізі реакції системи на одночасну дію двох вхідних впливів застосуємо метод суперпозиції. Сутність його полягає в тім, що сумарна реакція системи на кілька впливів дорівнює сума реакцій на кожне з них. Це дозволяє проводити аналіз якості керування, думаючи, що на систему діє тільки один вхідний вплив, а інші дорівнюють нулю.
режим, Що Стежить
У розглянутому прикладі спочатку припустимо, що на вхід системи впливає тільки завдання в, а збурювання f(t)=0. У цьому випадку одержуємо так званий режим, що стежить, у якому керована величина ((t) прагне досягти заданого значення в.
В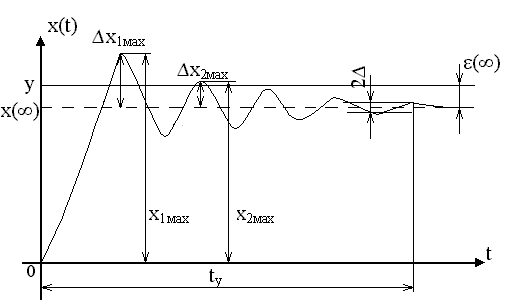 сталомурежимі
при в=соnst
керована величина
х(t)
теоретично через час
сталомурежимі
при в=соnst
керована величина
х(t)
теоретично через час
![]() t=
t=![]() установлюється
значення керованої величини
х(
установлюється
значення керованої величини
х(![]() ) може відрізняться від заданогов
на величину
) може відрізняться від заданогов
на величину
![]() (статистичні
системи) або бути дорівнюєв
(астатические
системи). При цьому варто пам'ятати, що
по своїх властивостях, які визначаються
структурою САУ,
у статичній системі в сталому режимі
помилка
(статистичні
системи) або бути дорівнюєв
(астатические
системи). При цьому варто пам'ятати, що
по своїх властивостях, які визначаються
структурою САУ,
у статичній системі в сталому режимі
помилка
![]() керування
існує завжди, а в астатической
вона відсутній.
керування
існує завжди, а в астатической
вона відсутній.
Визначимо по перехідній характеристиці основні показники якості керування в статичній системі, що працює в режимі, що стежить, тобто при в=соnst, f(t)=0.
Сформулюємо визначення основних показників якості керування:
1. Час керування
Часом керування
ty називається інтервал часу, у плині
якого починаючи з
моменту додатка впливу
на систему, до моменту, коли всі відхилення
керування
величини
![]() від
її сталого значеннях(
від
її сталого значеннях(![]() ) стануть менше наперед заданоївеличини
) стануть менше наперед заданоївеличини
![]()
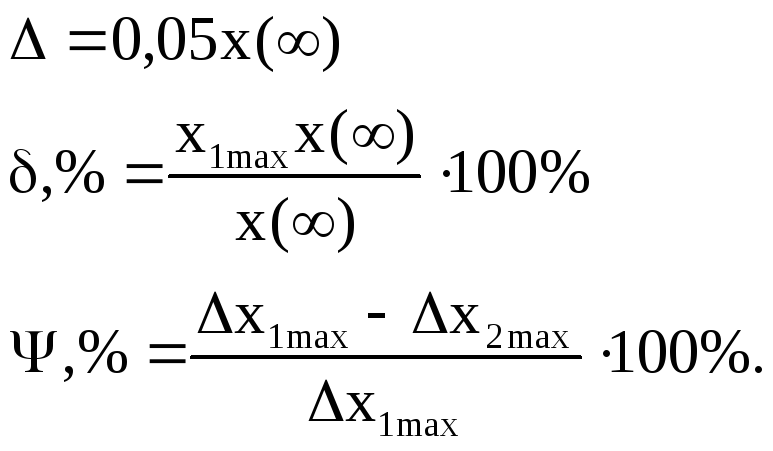
Звичайно на практиці приймають,
що після закінчення часу керування
всі відхилення
керованої величини
від сталого значення не повинні
перевищувати 5% від сталого значення,
тобто
![]() х(
х(![]() ). Таким чином, якщо на графіку перехідної
характеристики нанестидві
горизонтальні лінії на рівнях 1,05 х(
). Таким чином, якщо на графіку перехідної
характеристики нанестидві
горизонтальні лінії на рівнях 1,05 х(![]() ) і 0,95х(
) і 0,95х(![]() ),одержимо
деяку зону між цими лініями, з якої
після закінчення часу керування
ty не повинна виходити керована величина
х(t).
),одержимо
деяку зону між цими лініями, з якої
після закінчення часу керування
ty не повинна виходити керована величина
х(t).
У цілому цей показник якості характеризує тривалість (швидкодія) процесу керування. При настроюванні керуючої частини її параметра вибирають таким чином, щоб ty було мінімальним.
2. Перерегулювання
Перерегулюванням називається
максимальне відхилення
керованої величини
х1max
від сталого значення х(![]() )виражене
в %.
)виражене
в %.
Абсолютне значення максимального відхилення х1max визначається по кривої перехідної характеристики:
![]()
Відповідно, у відносних одиницях
![]()
Уважається,
що при виконанні необхідних вимог
відносно інших показників якості,
якість керування
тим вище, чим менше
![]()
3. Колебательность.
Колебательность
процеса
характеризується числом коливань
керованої величини
х(t)
щодо сталого значення х(![]() ) за часкерування
ty.
) за часкерування
ty.
Якщо за цей час перехідний процес робить число коливань більше заданого, то вважається, що система не має необхідну якість керування в частині її колебательности. Практично вважають припустимими 1?2 коливання, іноді 3?4.
Колебательность
процеса
досить повно характеризується ступенем
загасання
![]() ,
тобто загасанням амплітуди коливань
заодин
період.
,
тобто загасанням амплітуди коливань
заодин
період.
Ступенем загасання
![]() називається
різниця між першим
називається
різниця між першим![]() другим
другим![]() максимальнимивідхиленнями
керованої величини
х(t)
від сталого значення х(
максимальнимивідхиленнями
керованої величини
х(t)
від сталого значення х(![]() ),виражене
в %, тобто
),виражене
в %, тобто
![]()
4. Стала (статична) помилка
Під сталою помилкою
![]() розуміютьрізниця
між заданому й фактично сталим значенням
х(
розуміютьрізниця
між заданому й фактично сталим значенням
х(![]() ) керованоївеличини
х(t).
) керованоївеличини
х(t).
Статистична помилка може бути визначена в абсолютних одиницях виміру (ДО, Ра, м, В, А и т. буд.). У цьому випадку
![]()
Стала помилка
![]() в
абсолютних одиницяхвиміру
для статичних систем легко визначається
й аналітичним способом.
в
абсолютних одиницяхвиміру
для статичних систем легко визначається
й аналітичним способом.
У розглянутому прикладі конкретної системи, що працює в режимі, що стежить, передатна функція замкнутої системи по каналі впливу, що задає, для вихідної величини х(у).
![]() ;
;
де W (p) = Wy (p) · Wм (р) – передаточная функция разомкнутой системы.
Зображення по Лапласу вихідної величини в динаміку
![]()
а в сталому режимі
![]()
де ДО = Ку · Км –коэффициент передачи разомкнутой системы.
Ку -коефіцієнт передачі керуючої частини.
Км -коефіцієнт передачі обьекта керування по каналі керуючого впливу.
Оригінал сталого значення керованої величини
![]()
Оригінал сталого значення помилки керування
![]()
Аналіз отриманого вираження свідчить про те, що стала помилка в абсолютних одиницях виміру залежить від величини вхідного впливу в, а отже при різних значеннях завдання, що встановилася помилка теж буде різною. Тому такий показник якості керування не є об'єктивною оцінкою, оскільки характеризує не тільки власні властивості САУ, але багато в чому залежить від величини зовнішнього впливу.
Для усунення зазначеного недоліку сталу помилку виражають у відносних одиницях (в %).
![]()
У цьому випадку, при аналітичному
визначенні
![]() маємо
маємо
![]()
Як видно з отриманого вираження
![]() залежить тільки від власних параметрів
системи (ДО =Ку
· Км),
а тому є
об'єктивною оцінкою якості керування.
залежить тільки від власних параметрів
системи (ДО =Ку
· Км),
а тому є
об'єктивною оцінкою якості керування.
Розглянемо визначення основних показників якості в астатической системі, що працює в тім же режимі, що стежить (в = const, f(t)=0).
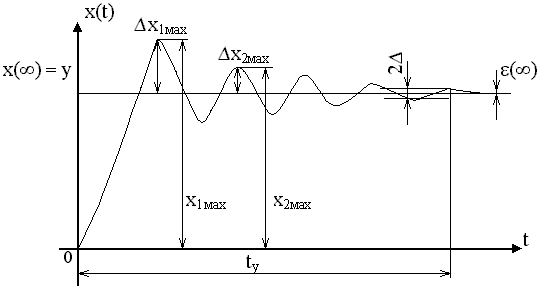
Час керування
ty, перерегулювання
![]() ,
ступінь загасання
,
ступінь загасання![]() визначаються
аналогічно розглянутому
вище.
визначаються
аналогічно розглянутому
вище.
Стала помилка
![]() вастатических
системах відсутній,
оскільки х(
вастатических
системах відсутній,
оскільки х(![]() )=в,
тому
)=в,
тому
![]() =0
як вабсолютних,
так й у відносних одиницях.
=0
як вабсолютних,
так й у відносних одиницях.
Стабілізуючий режим
При визначенні основних показників якості в САУ, що працюють у стабілізуючому режимі, передбачається, що на вході системи діє зовнішнє збурювання f(t), а вплив, що задає, в = 0.
Виконуючи своє функціональне
призначення, система керування працює
таким чином, щоб керована величина
х
(t) у сталому стані прагнула до заданого
значення в.
Але, оскільки в даному режимі в
= 0, те стале значення вихідної величини
х
(![]() ) також повинне бутирівним
нулю
в
астатических
системах або відрізняться від нуля в
статичних
системах на величину
) також повинне бутирівним
нулю
в
астатических
системах або відрізняться від нуля в
статичних
системах на величину
![]()
Розглянемо способи визначення основних показників якості по перехідній характеристиці статичної системи, що працює в стабілізуючому режимі (f(t)=const = f, в = 0).
Ч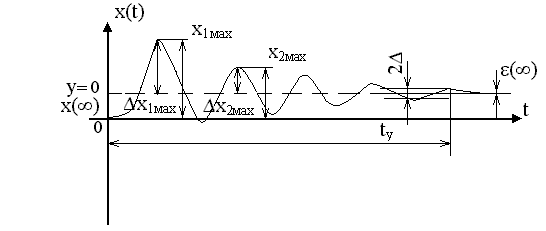 ас
керування
ty, як і раніше, визначається
виходячи
з умови, що процес
керування
завершується в момент, коли керована
величина
х(t),
змінюючись у процесі коливань, не
виходить за межі зони, обмеженої
значеннями
ас
керування
ty, як і раніше, визначається
виходячи
з умови, що процес
керування
завершується в момент, коли керована
величина
х(t),
змінюючись у процесі коливань, не
виходить за межі зони, обмеженої
значеннями
![]() де
де![]() .
.
Перерегулювання можна визначити по тій же формулі
![]()
Ступінь загасання
![]()
![]()
Стала помилка в абсолютних одиницях виміру
![]()
але, оскільки в цьому режимі в = 0, те
![]()
З отриманого випливає, що значення сталої помилки в абсолютних одиницях дорівнює сталому значенню керованої величини, узятому із протилежним знаком. Знак помилки в більшості випадків не грає істотної ролі, тому як статична помилка використають модуль сталого значення керованої величини, тобто
![]()
Однак, як указувалося вище, статична помилка, виражена в абсолютних одиницях виміру, залежить не тільки від власних властивостей САУ, але й від величини зовнішнього впливу, місця його додатка.
З метою же знаходження статичної помилки, вираженої у відносних одиницях (%), скористатися формулою
![]()
не
можна (в
= 0). Тому, для визначення статичної
помилки
![]() в цьому випадку якзасіб
рішення
поставленой
завдання
воспользуемая
результатами наступних аналітичних
міркувань.
в цьому випадку якзасіб
рішення
поставленой
завдання
воспользуемая
результатами наступних аналітичних
міркувань.
Передаточная функція розглянутої замкнутої системи, що працює в стабілізуючому режимі по каналі впливу, що обурює, f(t) для вихідної величини x(t).
![]()
Зображення по Лапласу вихідної величини в динаміку
![]()
у сталому режимі
![]()
де Кf – коефіцієнт передачі обьекта керування по каналі впливу, що обурює.
Оригинал сталого значення керованої величини
![]()
Оригінал статичної помилки керування, вираженої в абсрлютных одиницях
![]()
Статична помилка, виражена
у відносних одиницях (%), не повинна
залежати від величини
зовнішнього впливу, а також місця його
додатка
до системи. Тому її значення повинне
бути дорівнює значенню, певному
для наступного режиму, тобто
![]()
З наведеного випливає, що для одержання статичної помилки у відносних одиницях, для статичних стабілізуючих систем необхідне значення статичної помилки в абсолютних одиницях розділити на добуток Кf · f, т.е.
![]()
Подібні утруднення виникають при визначенні основних прямих показників якості керування й для астатических стабілізуючих систем.
Розглянемо
перехідну характеристику астатической
системи, що працює в тім же стабілізуючому
режимі
![]()
В астатических
системах стала помилка відсутня, тому
стале значення керованої величини
дорівнює завданню в,
тобто нулю.
Тому вже на етапі визначення часу
керування
ty виникають певні
проблеми.
астатических
системах стала помилка відсутня, тому
стале значення керованої величини
дорівнює завданню в,
тобто нулю.
Тому вже на етапі визначення часу
керування
ty виникають певні
проблеми.
Визначити
допускає
отклонение, що,
![]() наприкінці перехідного процесу як 5%
сталого значення керованоївеличини
х(
наприкінці перехідного процесу як 5%
сталого значення керованоївеличини
х(![]() ) не маєзмісту
(х(
) не маєзмісту
(х(![]() ) вастатических
стабілізуючих системах дорівнює нулю).
) вастатических
стабілізуючих системах дорівнює нулю).
Учебники
й інші літературні джерела ніяких
рекомендацій із цього питання не
пропонують. Найчастіше зображуються
відповідні перехідні характеристики
з
нанесеними на них зонами припустимих
відхилень
![]() ,
але про спосіб визначення конкретного
значення
,
але про спосіб визначення конкретного
значення![]() умовчують.
умовчують.
Аналогічна проблема виникає
при визначенні перерегулирова-ния![]() Скористатися вищенаведеною формулою
не можна всилу
рівності нулю
х(
Скористатися вищенаведеною формулою
не можна всилу
рівності нулю
х(![]() ) вастатических
стабілізуючих системах.
) вастатических
стабілізуючих системах.
Як рішення
завдання
по визначенню
перерегулювання
![]() вастатических
стабілізуючих системах
у літературі пропонується як паллиатив
формула:
вастатических
стабілізуючих системах
у літературі пропонується як паллиатив
формула:
![]()
де![]() - перше максимальне негативне значення
керованоївеличини
х
(
- перше максимальне негативне значення
керованоївеличини
х
(![]() ) .
) .
Слід зазначити, що використання цієї формули для статичних систем, що стежать, дає результати трохи відрізняються від значень, отриманих при використанні раніше наведеної формули.
Тїм не менш,
нова формула для визначення
![]() дає можливість із деякою погрішністювизначати
припустиме відхилення
дає можливість із деякою погрішністювизначати
припустиме відхилення
![]() .
.
Зіставимо обидві
формули для визначення
![]() вастатической
САУ,
у що стежить і стабілізує режимах
вастатической
САУ,
у що стежить і стабілізує режимах
.
Незважаючи на вищенаведене
зауваження у відношення
розходжень
одержуваних
результатам по обох формулах приблизно
вони повинні бути рівні, тобто
![]()
Підставивши відповідні значення, одержимо:
![]()
звідки:
Отримане значення можна розуміти як деяке стале квазизначение керованої величини х(t)в астатической стабілізуючій системі.
У такому випадку
![]() можна прийняти
можна прийняти
Варто сказати, що зазначені проблеми при визначенні прямих показників якості керування в астатических стабілізуючих САУ виникають лише при аналізі теоретично побудованих перехідних характеристик.
Експериментальні характеристики, побудовані в результаті проведення натурального експерименту на реально функціонуючої САУ, позбавлені особливостей показників, що утрудняють визначення, якості.
У реальних
САУ вплив, що задає,
в,
як правило, відмінно від нуля, отже,
![]() і
. Тому всі основні показники якостікерування
можуть бути визначені по основних
формулах, наведеним
на початку роздягнула.
і
. Тому всі основні показники якостікерування
можуть бути визначені по основних
формулах, наведеним
на початку роздягнула.
Как показано вище, у статичних системах, що стежать, стала помилка в абсолютних одиницях виміру
![]()
а в статичних стабілізуючих системах
![]()
де в и f – вхідні впливи у відповідних режимах.
Коефіцієнти, що коштують
при вхідних
змінних
у
и f
у правій частині зазначених
виражень,
що визначають
тангенс кута
нахилу статичних характеристик
![]() і
і![]() прийнято
називати коефіцієнтом статизма
або просто статизмом.
прийнято
називати коефіцієнтом статизма
або просто статизмом.
Відносна величина
сталої помилки
![]() або
або
![]() називається коефіцієнтом
статизма
системи по відповідному каналі.
називається коефіцієнтом
статизма
системи по відповідному каналі.
При цьому коефіцієнті статизма системи щодо впливу, що задає, визначається вираженням:
![]()
який чисельно дорівнює сталій помилці у відносних одиницях виміру (частках).
Той же коефіцієнт щодо впливу, що обурює
![]()
Непрямі оцінки якості керування
Прямі показники якості керування, як указувалося вище, визначаються безпосередньо по графіках перехідних характеристик. Природно, що для побудови цих графіків необхідно або вирішити відповідні диференціальні рівняння динаміки, або побудувати їх за результатами проведення натурного експерименту. І перше, і друге виконати часто буває досить важко, а іноді й неможливим у силу відсутності необхідних апаратур або за умовами технології, що регламентує проведення необхідних експериментів.
У зв'язку із цим в інженерній практиці широке застосування знаходять непрямі оцінки якості, які характеризують певні якісні показники процеса керування. Вони не є всестороними оцінками якості керування, а визначають лише окремі його сторони.
Кореневі оцінки якості
До непрямих оцінок якості ставляться кореневі, частотні, інтегральні. Розглянемо ті непрямі оцінки, які використаються при рішенні завдань синтезу систем керування.
Перехідна характеристика САУ, по якій визначаються розглянуті вище прямі основні показники якості, є результатом рішення рівняння динаміки. Характер отриманого рішення для системи n-го порядку визначаються власними параметрами, тобто коефіцієнтами рівняння. Однак деякі коефіцієнти рівняння однозначно пов'язані з коріннями характеристичного рівняння, що повністю визначає перехідну складову процесу.
Нагадаємо, що якщо характеристичне
рівняння системи n-го
порядку має S речовинних
виду
рі=-αі
й (n – S)
/2 пара
комплексних сполучених корінь типу
рк=-
αдо![]() jωдо
перехідна складова (складова, що визначає
вільний рух
системи).
jωдо
перехідна складова (складова, що визначає
вільний рух
системи).

де:
Сі,
Aк,
![]() до
– постійними, обумовленими початковими
умовами,
до
– постійними, обумовленими початковими
умовами,
n - порядок системи.
Наведене
вираження
свідчить про те, що хn
(t) являє собою суму експонент і сиусоид,
кожна з яких
![]() при αi>0,
αдо>0
(у стійких
системах).
при αi>0,
αдо>0
(у стійких
системах).
Неважко прийти до висновку про те, що кожна зі складових убуває тим швидше, чим більше за абсолютним значенням αi й αк. Іншими словами, чим далі розташоване коріння характеристичного рівняння від мнимої осі, тим швидше загасає перехідний процес. При цьому, довше всіх буде загасати складова, обумовлена найближчим до мнимої осі коренем. Саме цим коренем визначається загальний час перехідного процесу системи цілком.
Відстань до найближчого кореня від мнимої осі називається ступенем стійкості h.
Якщо найближчий до мнимої осі корінь речовинний, то ступінь стійкості аперіодична, якщо пари комплексних сполучених, то ступінь стійкості коливальна.
Зазначена відстань визначає запас стійкості й час загасання процесу, але ніяким образом не відбиває колебательность.
Колебательность процесу визначається наявністю комплексних сполучених корінь і співвідношенням мнимої й речовинної частин цих корінь.
Для оцінки колебательности користуються кореневою оцінкою, називаною ступенем колебательности μ.
Тангенс половинного кута ув'язненого між променями,проведеними з початку координат таким чином, щоб всіх корінь характеристичного рівняння замкнутої системи не виходили за межі площини обмеженої цими променями називається ступенем колебательности μ.
Розглянемо комплексну площину розташування корінь стійкої системи 5-го порядку.

Проведемо вертикальну пряму через найближчий до мнимої осі корінь (Р1) і два промені через комплексних сполучених корінь таким чином, щоб всі коріння перебували в площині, обмеженої цими променями.
Нехай чисельні значення корінь будуть:
У цьому випадку ступінь стійкості
![]()
Ступінь колебательности
μ=
Часто як коренева оцінка
колебательности
системи використають
кореневий показник колебательности
 .
.
Мнимая вісь, вертикальна пряма й два промені розбиває весь простір можливих значень корінь на 5 областей.
Припустимо, що отримані значення h і м є гранично припустимими. У цьому випадку, область 1, як область розташування корінь для нестійких систем, не може задовольняти необхідною вимогою в плані стійкості.
Розташування корінь в області 2 свідчить про те, що ступінь колебательности перевищує необхідну, а ступінь стійкості менше припустимої, хоча в принципі система стійка.
Знаходження всіх корінь в області 3 забезпечує системі необхідну колебательность, але не задовольняє вимогам припустимого ступеня стійкості.
Область 4 характеризується задоволенням необхідних вимог у забезпеченні заданого ступеня стійкості, але визначає неприпустимо високий ступінь колебательности.
Область 5 - єдина область розташування всіх корінь, що задовольняє необхідним вимогам у плані забезпечення необхідних як ступеня стійкості, так і ступеня колебательности.
Ця область розташована ліворуч від вертикальної лінії й обмежена двома лугами (границі області заштриховані).
Області із заданими значеннями h й μ можна виділити не тільки в площині розподілу корінь характеристичного рівняння.
Використовуючи D-розбивку
на площині
двох параметрів
![]() й
й
![]() ,можна виділити на цій
площині області,
у яких забезпечуються задані
h й μ.
,можна виділити на цій
площині області,
у яких забезпечуються задані
h й μ.
Якщо в процесі D- розбивки в
характеристичному
рівнянні замкнутої системи замінити
оператор Лапласа р
на jω,
і прирівняти до нуля
речовинну
й мниму
частини, що містять
обоє
конструктивних параметра
![]() й
й
![]() ,одержимо
рівняння координат основної кривої
D-розбивки, що є
границею
стійкості
й відображенням мнимої осі комплексної
площини
розподілу
корінь характеристичного рівняння на
площині
предметів
,одержимо
рівняння координат основної кривої
D-розбивки, що є
границею
стійкості
й відображенням мнимої осі комплексної
площини
розподілу
корінь характеристичного рівняння на
площині
предметів
![]() й
й
![]() .
.
Якщо ж у характеристичному
рівнянні замінити оператор р
не величиною
jw,
а р=-h+jw,
де h-задана
ступінь стійкості,
а потім повторити побудова
основної кривої D-розбивки,
то отримана крива відобразить на площині
параметрів
![]() і
і
![]() не мниму вісь, а вертикальну пряму,паралельну
їй і зрушену
від її
вліво на відстань h
. Ця крива обмежує
область,
у якій ступінь стійкості
вище заданої.
не мниму вісь, а вертикальну пряму,паралельну
їй і зрушену
від її
вліво на відстань h
. Ця крива обмежує
область,
у якій ступінь стійкості
вище заданої.
Якщо комплексних корінь характеристичного рівняння в загальному виді записати
![]()
те, беручи до уваги, що м=![]() одержуємо
L1=
одержуємо
L1=![]() Отже, якщо в характеристичне рівняння
замкнутої системи замістьр
підставити не (-h+jw), а (
Отже, якщо в характеристичне рівняння
замкнутої системи замістьр
підставити не (-h+jw), а (![]() )=
)=![]() виконати необхідні операції повизначенню
рівняння основної кривої
D-розбивки, те отримана в такий спосіб
крива на площині
конструктивних параметрів
виконати необхідні операції повизначенню
рівняння основної кривої
D-розбивки, те отримана в такий спосіб
крива на площині
конструктивних параметрів
![]() і
і
![]() відобразитьдва
промені проведені
на площині
розподіли корінь й обмежить область
із заданим ступенем колебательности
м.
відобразитьдва
промені проведені
на площині
розподіли корінь й обмежить область
із заданим ступенем колебательности
м.
Розглянуті криві D-розбивки
на площині
параметрів
![]() і
і
![]() зображені на малюнку.
зображені на малюнку.
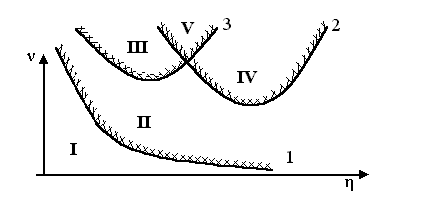
На малюнку:
крива 1 - границя стійкості (р=jw);
крива 2 - границя заданого ступеня стійкості p = -h+j?);
крива 3 – границя
заданого ступеня колебательности
![]() ).
).
Отримані криві розбивають простір можливих значень конструктивних параметрів САУ на 5 областей:
1. - область нестійкості, характеристичне рівняння замкнутої системи має корінь розташовані праворуч від мнимої осі в комплексній площині розподілу корінь.
2. - область стійкості, але зі ступенем стійкості менше заданої, і ступенем колебательности більше заданої, і ступенем колебательности більше заданої. Корінь характеристичного рівняння розташовані у відповідній області 2 комплексної й площини корінь.
3. - область стійкості зі ступенем стійкості менше заданої, і ступенем колебательности менше заданої. Корінь характеристичного рівняння перебувають в області 3 площини корінь.
4. - область зі ступенем стійкості більше заданої, і ступенем колебательности теж більше необхідної. Корінь на площині корінь у відповідній області 4.
5. - область у якій повністю виконуються вимоги в плані забезпечення необхідного ступеня стійкості й ступені колебательности. Характеристичне рівняння системи має всіх корінь, розташовані в області 5 площини корінь.
Зв'язок між кореневими оцінками й прямими показниками якості керування
Як указувалося вище, кореневі оцінки не є всебічними оцінками, вони характеризують як тільки певні сторони якості керування.
Так, ступінь стійкості h визначає швидкість загасання процесу, тобто час керування ty. Визначимо залежність ty від h.
Якщо найближчий корінь речовинний рi=-h, то відповідному цьому кореню складова перехідного процеса
![]()
Будемо вважати,
що наприкінці перехідного процесу
![]() (5%первісного
значення Сh).
Отже наприкінці перехідного процесу
через час t=ty
маємо:
(5%первісного
значення Сh).
Отже наприкінці перехідного процесу
через час t=ty
маємо:
![]() звідки
звідки
![]()
Логарифмуючи ліву й праву частини, одержуємо
![]()
т. е.
![]()
Якщо найближчих корінь
комплексні сполучені
![]() відповідним цим корінням складова
перехідного процесу
відповідним цим корінням складова
перехідного процесу
![]()
Поклавши
![]() наприкінці перехідного процесу при
t= ty, одержимо
трансцендентне рівняння
наприкінці перехідного процесу при
t= ty, одержимо
трансцендентне рівняння
![]()
Визначаючи
верхню границю
перехідного процесу при
![]() одержимо,
як і раніше
одержимо,
як і раніше
![]()
Отже, і в цьому випадку
![]()
Іншими словами абсолютно неважливо, які по характері корінь, речовинн або комплексні, визначають ступінь стійкості h. В обох випадках час керування ty визначаються однієї й тією же залежністю від h.
Варто нагадати, що перехідний процес має коливальну складову лише при наявності хоча б однієї пари комплексних сполучених корінь.
Припустимо, що є пара комплексних корінь.
![]() де μ =
де μ =![]() .
.
Відповідній цій парі корінь складова перехідного процесу
![]()
Визначимо
зв'язок
ступеня колебательности
μ с загасанням амплітуди коливань
![]() заодин
період, тобто зі
ступенем загасання
заодин
період, тобто зі
ступенем загасання
![]() .
.
П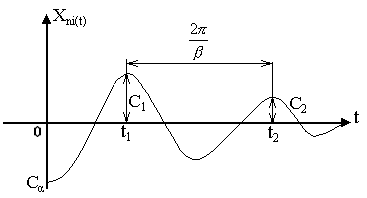 редположим,
що коливальна складова перехідного
процесу системи, що відповідає зазначеній
парі комплексних корінь має вигляд:
редположим,
що коливальна складова перехідного
процесу системи, що відповідає зазначеній
парі комплексних корінь має вигляд:
У момент t,
амплітудне значення
![]()
Перехід коливань
![]()
![]() деТn
-період коливань, з;
f
– циклічна частота, Гц; β
- мнима частина комплексних корінь
(кругова частота коливань).
деТn
-період коливань, з;
f
– циклічна частота, Гц; β
- мнима частина комплексних корінь
(кругова частота коливань).
Через період, тобто в момент t2, амплітудне значення
![]()
Загасання (ступінь загасання) за один період
![]()
Підставляючи значення З2, одержимо :
де m - кореневий показник колебательности
Звичайно, у САУ
допускається загасання за період
![]() неменш,
ніж 90-98%, що відповідає діапазону
μ від 2,72 до 1,57, а m від 0,37 до 0,64.
неменш,
ніж 90-98%, що відповідає діапазону
μ від 2,72 до 1,57, а m від 0,37 до 0,64.
На закінчення необхідно підкреслити, що ступінь стійкості h визначає однозначно час керування ty, а ступінь колебательности ? і кореневий показник колебательности m - загасання коливань.
Діаграма Вишеградського
Використання діаграми Вышнеградского для оцінки якості процесу керування дозволяє графічно наближено визначити ступінь стійкості h і ступінь колебательности μ для систем третього порядку.
Порядок побудови діаграми полягає в наступному.
Нехай характеристичне рівняння замкнутої системи 3 го порядки має вигляд:
![]()
Приведемо
його
до нормованого виду,
розділивши всі члени на
![]()
![]()
Позначимо:
 ,
тобто
,
тобто
Після указаной підстановки одержимо:
![]()
де
![]()
![]() безрозмірні
коефициенты.
безрозмірні
коефициенты.
Відповідно до критерію
стійкості
Вышнеградского
границя
стійкості
визначається
з рівняння
![]() (А1>0;
А2>0).
У площині
коефіцієнтів А1,А2
це рівняння відображається у вигляді
гіперболи, асимптотами
якої є
осі координат, простір расположеное
вище гіперболи є
областю
стійкості.
(А1>0;
А2>0).
У площині
коефіцієнтів А1,А2
це рівняння відображається у вигляді
гіперболи, асимптотами
якої є
осі координат, простір расположеное
вище гіперболи є
областю
стійкості.
Підставивши, у відповідне
рівняння
![]() одержимо
на площині
А1,А2
крапку
С. У цій крапці
виконується умова
одержимо
на площині
А1,А2
крапку
С. У цій крапці
виконується умова
![]()
![]()
Всі
три
корені отриманого рівняння в крапці
З,
![]() тобтоє
речовинними й рівними між собою.
тобтоє
речовинними й рівними між собою.
У загальному випадку в системі 3-го порядку корінь характеристичного рівняння можуть бути:
Рівними речовинними (у розглянутій крапці З).
Різними речовинними.
Один речовинний і два комплексних сполучених.
У площині коефіцієнтів характеристичного рівняння А2, А1 границя області, для якої корінь будуть різними речовинними, визначаються з умови рівності нулю дискримінанта.
![]()
Підставляючи в зазначене вираження різні значення А1 й А2, одержимо криві РЄ й CF. Усередині області (I), обмежене кривій ЕCF дискримінант позитивний, всі корінь для неї речовинні. За межами цієї області дискримінант негативний, тому один корінь речовинний, а два інших - комплексні сполучені.
Варто нагадати, що якщо в площині розподілу корінь найближчим до мнимої осі буде речовинний корінь, ступінь стійкості аперіодична, якщо ж ближче всіх розташована пара комплексних сполучених корінь, то ступінь стійкості коливальна. Отже, істотне значення має взаиморасположение речовинного й пари комплексних сполучених корінь.
Розглянемо граничний випадок, коли речовинний і пари комплексних корінь перебувають на тому самому відстані від мнимої осі,
т. е.
![]()
![]()
У цьому випадку характеристичне рівняння буде мати вигляд:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Cледовательно:
Вирішуючи спільно отриману систему рівнянь:
![]()
звідки
Підставляючи значення
![]() й
й![]() в 3-і рівняння системи
в 3-і рівняння системи
В остаточному підсумку одержимо рівняння:
![]()
У площині коефіцієнтів А2,А1 це рівняння відображається кубічною параболою ВР поділяюча область стійкості поза межами площини обмеженій кривій ЕС, на дві області, одна йз яких (II) відповідає тому розташуванню корінь, у якому найближчим до мнимої осі є речовинний корінь, а інша (область III) відповідає розташуванню корінь, у якому найближчими є пара комплексних корінь.
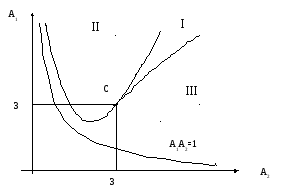
Таким чином, Диаграммма Вышнеградского, що представляє собою сукупність кривих ВР, РЄ, CF розбиває область стійкості площини коефіцієнтів А2,А1 системи 3-го порядку на три подобласти (I, II, III), кожної з яких відповідають певний вид корінь характеристичного керування і їх взаиморасположение на комплексній площині корінь.
Взаиморасположение корінь і вид перехідного процеса для кожної з областей представлені на малюнках:
Область Й:
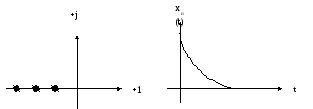
ОбластьII:

ОбластьIII:
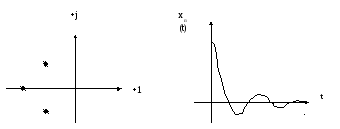
По діаграмі Вышнеградского можна судити лише про характер перехідного процеса, але не можна висловити певного судження про інші характеристики (часу процесу керування tу, загасанні, і т.д.).
У зв'язку із цим діаграма була вдосконалена нанесенням на неї додаткових ліній нормованого ступеня стійкості ho і ступеня колебательности μ.
Визначивши значення безрозмірних коефіцієнтів А2,А1 по відповідних формулах і скориставшись діаграмою Вышнеградского, доповненої лініями ho й μ, неважко визначити ступінь стійкості й ступінь колебательности.
При цьому ступінь стійкості
h й її
нормоване значення ho
зв'язані
залежністю
![]() (приводиться
без доказу, більш докладно див.
(приводиться
без доказу, більш докладно див.
![]() стор. 215-223).
стор. 215-223).
Частотні оцінки якості керування
Оцінки якості по частотних властивостях замкнутих систем.
Під частотними оцінками якості будемо розуміти такі оцінки, які базуються на деяких частотних властивостях як розімкнутих, так і замкнутих систем.
Ч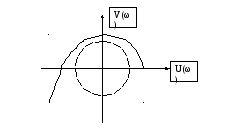 астотні
оцінки замкнутих систем найбільше
повно розроблені відносно оцінки запасу
стійкості. Запас стійкості
може бути виражений різним способом,
залежно від того,
яким критерієм скористатися. Так,
наприклад, якщо використається
критерій стійкості
Михайлова,
запас стійкості
відповідає радіусу
окружності «заборонної зони», у яку не
повинен заходити годограф Михайлова.
астотні
оцінки замкнутих систем найбільше
повно розроблені відносно оцінки запасу
стійкості. Запас стійкості
може бути виражений різним способом,
залежно від того,
яким критерієм скористатися. Так,
наприклад, якщо використається
критерій стійкості
Михайлова,
запас стійкості
відповідає радіусу
окружності «заборонної зони», у яку не
повинен заходити годограф Михайлова.
Оцінка якості керування по ВЧХ замкнутої системи
Будемо думати, що перехідний процес у САУ викликаний стрибком впливу, що задає, в. У загальному випадку речовинна частотна характеристика (ВЧХ) Р(ω) може мати вигляд:

Інтервал частот
![]() ,
у якому
,
у якому![]() ,
називається інтерваломпозитивності,
інтервал частот
,
називається інтерваломпозитивності,
інтервал частот
![]() називається інтерваломістотних
частот, якщо при
називається інтерваломістотних
частот, якщо при
![]()
![]() стає меншедеякої
досить малої величини
стає меншедеякої
досить малої величини
![]() .
.
Впливом іншої частини ВЧХ
(при
![]() )
на якість процесукерування
можна зневажити. Якщо ж при ω>ωп
виявляється,
що
)
на якість процесукерування
можна зневажити. Якщо ж при ω>ωп
виявляється,
що
![]() <
<![]() ,те при оцінці якості процесукерування
можна брати до уваги тільки інтервал
позитивності
,те при оцінці якості процесукерування
можна брати до уваги тільки інтервал
позитивності
![]() .
.
Сформулюємо ряд положень, що визначають взаємозв'язок ВЧХ і перехідної характеристики САУ.
Якщо ВЧХ P(?) обмежена по модулі на всьому діапазоні істотних частот, то перехідна характеристика також обмежена по модулі.
Якщо P(ω) при деякій частоті ωp необмежено зростає, то в системі виникають незатухаючі коливання із частотою ωp.
Якщо ВЧХ
P(ω) може бути представлена у вигляді
суми окремих характеристик
![]() топерехідний
процес
відповідний P(ω) може бути отриманий
як сума перехідних
процесов
для кожного
топерехідний
процес
відповідний P(ω) може бути отриманий
як сума перехідних
процесов
для кожного
![]()
![]()
де
 .
.
Якщо ВЧХ
зв'язані
співвідношенням
![]() то
відповідніїм
перехідні процеси будуть також зв'язані
співвідношенням
то
відповідніїм
перехідні процеси будуть також зв'язані
співвідношенням
![]()
Ніж ширше ВЧХ (чим більшу площу вона займає), тим швидше загасає перехідний процес.
Сталого значення керованої
величини
дорівнює значенню Р(ω) при нульовій
частоті, тобто
![]()
Початкове значення перехідної
характеристики дорівнює кінцевому
значенню ВЧХ
![]()
Якщо ВЧХ
є
позитивною незростаючою функцією,
тобто
![]() >0;
і
>0;
і при 0<ω<ωc,
те перерегулювання σ,% не перевищує 18%
від сталого значення
при 0<ω<ωc,
те перерегулювання σ,% не перевищує 18%
від сталого значення
![]() .
.
Якщо ВЧХ
являє собою монотонну убутну функцію
(тобто <0) вобласті
істотних частот, то перехідний
процес
також монотонним,
без перерегулювання. Час перехідного
процесу, тобто час керування,
<0) вобласті
істотних частот, то перехідний
процес
також монотонним,
без перерегулювання. Час перехідного
процесу, тобто час керування,
![]() >
>![]() .
.
У випадку незростаючої
ВЧХ
час керування
![]() укладений
у межах
укладений
у межах
![]() <
<![]() <
<![]() .
.
Перехідний процес буде коливальним, якщо є значення P(?)>P(0).
З огляду на перераховані
положення
відносно виду
ВЧХ
й її зв'язку
з
перехідними характеристиками , неважко
визначити
основні показники якості керування:
час керування
ty,
перерегулювання σ,%, що встановилася
помилку керування
![]() .
.
Оцінка якості керування по АЧХ замкнутих систем
Як частотні оцінки можна використати різні значення частот, що визначають вид АЧХ замкнутої системи.
Розглянемо АЧХ стійкої замкнутої коливальної системи
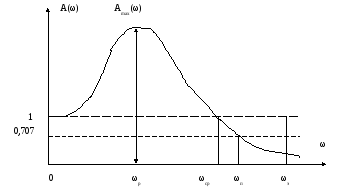
На графіку прийняті позначення:
ωp- резонансна частота, що відповідає піку АЧХ;
ωср- частота зрізу відповідній умові А(ωcр)=1;
ωп-частота, що відповідає верхній границі смуги пропущення, обумовлена з умови А(ωп)=0,707;
ωэ-эквивалентная
частота смуги пропущення, обумовлена
по вираженню
ωэ
=![]()
Еквівалентна частота смуги пропущення являє собою підставу прямокутника, висота якого дорівнює одиниці, а площа дорівнює площі під кривою квадрата А(?).
Оскільки резонансна частота замкнутої системи ωp у багатьох випадках близька до частоти зрізу розімкнутої системи ωcp і відповідає частоті коливань у замкнутій системі, час досягнення першого максимуму на перехідній характеристиці може бути визначене по наближеній залежності
tм

Якщо перехідний процес у системі закінчується через 1-2 коливання, то час керування tу можна визначити
tу=
(1÷2)
Необхідне значення ωp визначається по АЧХ замкнутої системи, а ωcp – по крапці перетинання окружності одиничного радіуса із центром на початку координат з АФЧХ розімкнутої системи.
Оцінки якості по АФЧХ розімкнутих систем.
При використанні критерію
стійкості
Найквиста
запас стійкості
можна визначити
по видаленню
АФЧХ
розімкнутої системи від критичної
крапки
ІЗ![]() Із цієюметою
вводяться поняття запасу
стійкості по модулі
й запасу стійкості по
фазі.
Із цієюметою
вводяться поняття запасу
стійкості по модулі
й запасу стійкості по
фазі.
Запас стійкості
по модулі
визначається
відстанню від крапки
перетинання АФЧХ
розімкнутої системи з
речовинною віссю до крапки
З![]()
Для випадку умовної стійкості,
зображеного
на малюнку, запас стійкості
по модулі
визначається
розташуванням
крапок
а й
d, величинами,
вираженими звичайно в децибелах
![]() й
й![]() .
.

Запас стійкості по модулі тим більше, чим більше L1 й L2, у добре демпфированых системах ці величини становлять приблизно 6÷20dв, що відповідає 2?10 у лінійному масштабі.
У випадку абсолютної стійкості
зміст
має тільки величина
![]() тому
що
тому
що![]() .
.
Фізичний зміст запасу стійкості по модулі полягає в тому, що він показує, у скільки разів можуть зміниться значення модуля АФЧХ (коефіцієнта передачі) розімкнутої системи до втрати стійкості.
впливи, Що Обурюють, що приводять до зміни модуля комплексного коефіцієнта передачі W(j? ) без зміни фазових зрушень, називаються збурюваннями по модулі.
Аналіз малюнка показує, що
розглянута система може втратити
стійкість
не тільки при зменшенні L1
й L2
(при переміщенні крапок
a й d
уздовж осі абсцис убік
крапки
З![]() але й при повороті всіх векторів W(jω)
погодинній
стрілці на кут
γз
(у крапку
C
але й при повороті всіх векторів W(jω)
погодинній
стрілці на кут
γз
(у крапку
C![]() попадає
крапка
b).
попадає
крапка
b).
Запасом
стійкості
по фазі називається кут
![]() з=180º+
з=180º+![]() (ω), де
(ω), де![]() (ω)
- аргумент комплексного коефіцієнта
передачі розімкнутої системи при
частоті, для якої значенняАЧХ
дорівнює одиниці.
(ω)
- аргумент комплексного коефіцієнта
передачі розімкнутої системи при
частоті, для якої значенняАЧХ
дорівнює одиниці.
Запас стійкості
по фазі визначає,
на який кут
по годинній
стрілці можливий поворот векторів АФЧХ
розімкнутої системи до втрати стійкості.
У добре демпфированых
системах запас стійкості
по фазі становить
30º![]() ÷60?.
÷60?.
впливи, Що Обурюють, що змінюють зрушення по фазі без зміни модуля(j? ) називаються збурюваннями по фазі.
До збурювань по модулі варто віднести всі ті збурювання, які, у результаті їхньої дії, змінюють коефіцієнти передачі окремих елементів системи. Найпоширенішими збурюваннями по фазі є збурювання, що приводять до змін чистого запізнювання в системах керування.
Недоліком розглянутих оцінок є те, що для визначення запасу стійкості необхідно знаходити два числа: βз й γз. Ні те, ні інше окремо, ні обоє разом ніяк не визначають однозначно чисельно хоча б один з основних прямих показників якості керування. Щодо цього більш зручно оцінювати якість керування по частотному показнику колебательности.
Частотний показник колебательности
Розглянемо АФЧХ розімкнутої системи:

На малюнку
![]()
Розглянемо
відносини:
 ,
де
,
де![]() векторАФЧХ
замкнутої системи. АЧХ
замкнутої системи А(?) являє собою модуль
АФЧХ.
векторАФЧХ
замкнутої системи. АЧХ
замкнутої системи А(?) являє собою модуль
АФЧХ.
А(w)=
Відношення
![]() будучи
начением
АЧХ
замкнутої системи, однозначно залежить
від ступеня стійкості.
Чим ближче АФЧХ
розімкнутої системи підходить до крапці
З,
тим менше відрізок Сак
і більше відрізок
ОАk,
а отже, тим більше максимум зазначеного
відношення.
Якщо АФЧХ
пройде
через крапку
З,
то довжина відрізка Сак стає рівної
до нуля, а значення А(ω)- нескінченності.
При цих умовах система буде на границі
стійкості,
у ній виникнуть незатухаючі коливання.
будучи
начением
АЧХ
замкнутої системи, однозначно залежить
від ступеня стійкості.
Чим ближче АФЧХ
розімкнутої системи підходить до крапці
З,
тим менше відрізок Сак
і більше відрізок
ОАk,
а отже, тим більше максимум зазначеного
відношення.
Якщо АФЧХ
пройде
через крапку
З,
то довжина відрізка Сак стає рівної
до нуля, а значення А(ω)- нескінченності.
При цих умовах система буде на границі
стійкості,
у ній виникнуть незатухаючі коливання.
Із сказаного випливає що
максимум відносини
А(ω)=![]() характеризуєколебательность
системи.
характеризуєколебательность
системи.
Частотним показником колебательности М називається максимальне значення АЧХ замкнутої системи при початковій ординаті, рівній одиниці, т.е являє собою відносну висоту резонансного піка.
Розглянемо більш докладно частотний показник колебательности як оцінку якості.
Для судження про частотний показник колебательности М замкнутої системи на комплексній площині W(j?) варто нанести лінію відповідному заданому значенню М=const.
Думаємо, що комплексний коефіцієнт передачі розімкнутої системи представлена у вигляді W(j?) = U(?)+j(?), де U(?) і V(?) - значення речовинної й мнимої частин відповідно.
Тоді з вищенаведеного малюнка випливає, що
ОАк=![]()
Сак=![]()
Отже:
М2=
Або інакше:
М2(1-U(ωк)))2+М2V2(ωк) =U2(ωк) +V2(ωк)
Розрив дужки, одержимо
М2-2М2U(ωк) +M2U2(ωк) +M2V2(ωк) =U2(ωк) +V2(ωк);
(М2-1)U2(ωк) +(M2-1)V2(ωк) -2M2U(ωк) = - M2.
Розділивши почленно на М2-1:
U2(ωк)
+V2(ωк)
