

Види з’єднань динамічних ланок.
Утворюючи ту чи іншу систему автоматичного керування, динамічні ланку можуть бути з’єднані між собою різними способами. Розрізняють послідовне та паралельне з’єднання. При послідовному з’єднанні вхідний сигнал послідовно проходить через всі ланки. При паралельному з’єднанні можливі два варіанти: перший, коли один вхідний сигнал подається на входи всіх ланок, а всі їхні вихідні сигнали додаються на суматорі (прямий зв'язок), другий, коли вихідний сигнал якоїсь ланки, або певна його частина, знову проступає на її вхід (зворотний зв’язок). При тому, цей сигнал може додаватися до основного або відніматися (відповідно додатний або від’ємний зворотний зв'язок).
Розглянемо визначення еквівалентної функції передачі структури при послідовному з’єднанні динамічних ланок:
Значення функцій передачі окремих ланок:
![]()

 ;
;
![]() ;
;
![]() .
.
Еквівалентна функція передачі всієї структури при послідовному з’єднанні
![]() .
.
Якщо чисельник та знаменник одночасно помножити на Х2(р), Х3(р), то отримаємо:
![]() ,
,
тобто, при послідовному з’єднанні динамічних ланок еквівалентна функція передачі такої структури дорівнює добутку функцій передачі окремих елементів:
![]() .
.
При паралельному з’єднанні (прямий зв’язок) структурна схема виглядає так:
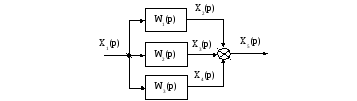
Вихідний сигнал структури являє собою суму вихідних сигналів окремих ланок:
Х5(р) = Х2(р) + Х3(р) + Х4(р),
а еквівалентна функція передачі такої структури:
![]() ,
,
іншими словами при паралельному з’єднанні еквівалентна функція передачі дорівнює сумі функцій передачі окремих елементів:
![]() .
.
При зворотному зв’язку, де одна ланка охоплює зворотним зв’язком іншу, структурна схема має вигляд:
З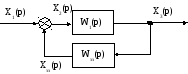 гідно
з наведеною схемою Х3(р)
= Х2(р)
W1(p),
Хзз(р)
= Х3(р)
Wзз(p),
а Х2(р)=
Х1(р)±Хзз(р),
«плюс» для додатного, «мінус» для
від’ємного зворотного зв’язку. В
останньому випадку нижній сектор
умовного позначення суматора
заштриховують.
гідно
з наведеною схемою Х3(р)
= Х2(р)
W1(p),
Хзз(р)
= Х3(р)
Wзз(p),
а Х2(р)=
Х1(р)±Хзз(р),
«плюс» для додатного, «мінус» для
від’ємного зворотного зв’язку. В
останньому випадку нижній сектор
умовного позначення суматора
заштриховують.
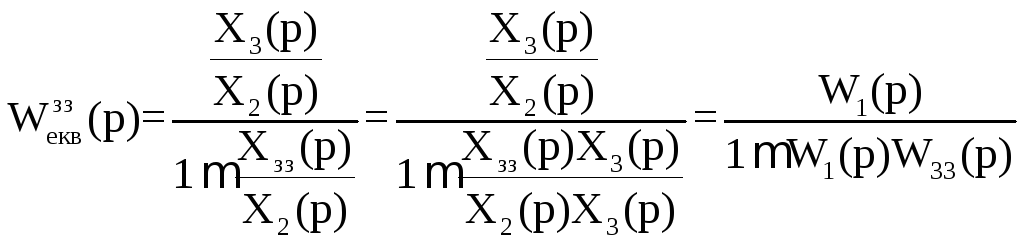
Еквівалентна функція передачі такої структури :
![]() .
.
Поділивши чисельник і знаменник на Х3(р), отримаємо:
 .
.
В останній формулі знак «плюс» вибирається для від’ємного зворотного зв’язку, а «мінус» для додатного. Таким чином, при наявності зворотного зв’язку еквівалентна функція передачі являє собою дріб, в чисельнику якої записана функція передачі ланки, яка охоплена зворотним зв’язком, а у знаменнику функція передачі ланки, яка її охоплює.
Різновиди функцій передачі систем керування.
Розглянемо просту одноконтурну систему, яка складається з об’єкта керування та керуючої частини.
Н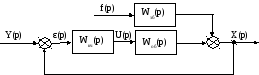 а
схемі позначено:
а
схемі позначено:
Wзб(p) – функція передачі об’єкта керування по каналу збурення;
Wоб(p) – функція передачі об’єкта керування по каналу керування;
Wкч(p) – функція передачі керуючої частини;
f(p) – збурення;
Y(p) – завдаючий вплив (завдання);
U(p) – керуючий вплив;
Х(р) – координата стану об’єкта керування;
ε(р) = Y(p) - Х(р) – помилка керування;
В запропонованій системі можна виділити дві вхідних дії: завдання Y(p) та збурення f(p) і дві вихідних координати – координату стану об’єкта Х(р), помилку керування ε(р).
Функція передачі за визначенням може бути записана тільки для однієї вхідної та однієї вихідної величини, при тому вважають, що інші вхідні величини відсутні, тобто дорівнюють нулю.
Будемо вважати, що на систему керування впливає дія лише завдання Y(p) ( збурення вважають відсутнім, f(p)=0), а вихідною величиною є координата стану об’єкта керування – Х(р), то за відповідну функцію передачі слід прийняти
![]() ,
,
яку називають функцією передачі для керованої величини Х(р) по завданню Y(p). Добуток двох функцій передачі, що входить до означеного виразу являє собою еквівалентну функцію передачі W(p) послідовно з’єднаних керуючої частини і об’єкту керування, тобто розімкненої системи (без урахування від’ємного зворотного зв’язку):
W(p) = Wкч(p)· Wоб(p).
Виконавши відповідну підстановку, отримаємо у кінцевому вигляді:
![]() .
.
Якщо вважати, що
на систему керування, як і попередньому
випадку, впливає дія лише завдання
Y(p),
але вихідною величиною є помилка
керування ε(р), то відповідну функцію
передачі для помилки керування по
завданню
![]() визначити неважко:
визначити неважко:
![]() .
.
Д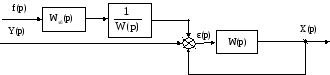 ля
визначення функції передачі
ля
визначення функції передачі![]() для керованої величини Х(р) по збуреннюf(p)
структурну схему треба дещо перетворити,
виконуючі необхідні правила перетворення:
для керованої величини Х(р) по збуреннюf(p)
структурну схему треба дещо перетворити,
виконуючі необхідні правила перетворення:
Приймаючі до уваги, що вхідною величиною будемо вважати збурюючий вплив f(p) (Y(p)=0), а вихідною координата стану об’єкта керування Х(р), відповідна функція передачі для керованої величини Х(р) по збуренню f(p) матиме вигляд:
![]() .
.
Порівнюючи всі три різновиди функцій слід звернути увагу на тотожність їх знаменників. Це дуже важлива особливість, тому що знаменник являє собою ліву частину рівняння динаміки системи керування. Тож, прирівнявши вираз знаменника до нуля, отримаємо характеристичне рівняння, яке характеризує особисті властивості системи не пов’язані з характером та місцем прикладення зовнішніх впливів. Отже, яким би різновидом функції передачі не користуватися при вивченні особистих властивостей системи керування, наприклад таких як стійкість, отримаємо однаковий результат.