

4.5 Динамические фильтры
Изложенный в
предыдущем разделе метод расположения
корней характеристического уравнения
предполагает, что все элементы вектора
состояния измеряются (матрица
![]() должна быть диагональной). На практике
обычно можно измерить только часть
элементов вектора состояния, например,
для управления рукой робота надо знать
угловые перемещения в суставах робота
и их скорости; скорости обычно замерить
труднее, чем перемещения. Кроме того,
на руке робота стараются устанавливать
как можно меньше элементов системы
управления. Поэтому обычно датчики
скорости стараются не устанавливать
и надо осуществить управление только
с помощью датчиков перемещения.
должна быть диагональной). На практике
обычно можно измерить только часть
элементов вектора состояния, например,
для управления рукой робота надо знать
угловые перемещения в суставах робота
и их скорости; скорости обычно замерить
труднее, чем перемещения. Кроме того,
на руке робота стараются устанавливать
как можно меньше элементов системы
управления. Поэтому обычно датчики
скорости стараются не устанавливать
и надо осуществить управление только
с помощью датчиков перемещения.
Пусть объект управления описывается системой
![]() , (4.5.1)
, (4.5.1)
![]() , (4.5.2)
, (4.5.2)
где
![]() – вектор внешних воздействий на объект,
– вектор внешних воздействий на объект,
![]() – матрица внешних воздействий,
– матрица внешних воздействий,
![]() –
вектор погрешностей датчиков,
–
вектор погрешностей датчиков,
![]() – матрица вектора погрешностей.
– матрица вектора погрешностей.
Размерности вновь введенных векторов и матриц даны в (3).
![]() . (4.5.3)
. (4.5.3)
Составим структурную схему объекта управления, соответствующую системе (1), (2) и изображенную в верхней части рис. 1.
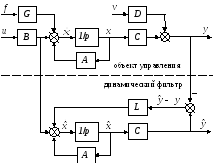
![]()
Рисунок 4.5.1 – Структурные схемы объекта управления и динамического фильтра
В отличие от
материально существующего объекта
управления (например, электродвигателя
с технологическими механизмами),
динамический фильтр программируется
и решается в вычислителе. Структурная
схема динамического фильтра должна в
максимально возможной степени совпадать
со структурной схемой объекта управления
(нижняя часть рис. 1). В структурную схему
фильтра не вошли цепи, связанные с
неизвестными входными воздействиями
![]() и
и![]() .
Для синхронизации работы динамического
фильтра с работой объекта управления
предназначена цепь, содержащая матрицу
.
Для синхронизации работы динамического
фильтра с работой объекта управления
предназначена цепь, содержащая матрицу![]() коэффициентов усиления фильтра размером
(
коэффициентов усиления фильтра размером
(![]() ).
По структурной схеме фильтра запишем
уравнение его работы.
).
По структурной схеме фильтра запишем
уравнение его работы.
![]() . (4.5.4)
. (4.5.4)
Разность
![]() называетсяневязкой.
С помощью уравнения (2) представим
уравнение (4) в виде
называетсяневязкой.
С помощью уравнения (2) представим
уравнение (4) в виде
![]() . (4.5.5)
. (4.5.5)
Введём в рассмотрение ошибку динамического фильтра
![]() . (4.5.6)
. (4.5.6)
Для получения динамического уравнения ошибки фильтра вычтем из уравнения (5) уравнение (1), получим
![]() . (4.5.7)
. (4.5.7)
Уравнение (7) можно
рассматривать как неоднородное
дифференциальное уравнение с внешним
воздействием
![]() .
Для того чтобы ошибка фильтра была
ограниченной, необходимо, чтобы частное
решение уравнения (7) было асимптотически
устойчивым. Для этого необходимо и
достаточно, чтобы нулевое решение
уравнения (8) было асимптотически
устойчивым.
.
Для того чтобы ошибка фильтра была
ограниченной, необходимо, чтобы частное
решение уравнения (7) было асимптотически
устойчивым. Для этого необходимо и
достаточно, чтобы нулевое решение
уравнения (8) было асимптотически
устойчивым.
![]() . (4.5.8)
. (4.5.8)
Для уравнения (8) характеристическое уравнение будет иметь вид
![]() , (4.5.9)
, (4.5.9)
где
![]() – неизвестная матрица коэффициентов
усиления динамического фильтра.
Раскрывая определитель и приравнивая
полученное к какому-либо стандартному
полиному, можно записать систему
алгебраических уравнений для нахождения
элементов матрицы
– неизвестная матрица коэффициентов
усиления динамического фильтра.
Раскрывая определитель и приравнивая
полученное к какому-либо стандартному
полиному, можно записать систему
алгебраических уравнений для нахождения
элементов матрицы![]() .
При этом переходный процесс уравнения
(8) будет соответствовать заданному. В
том случае, когда решение уравнения
(8) стремится к 0, из (6) следует, что
.
При этом переходный процесс уравнения
(8) будет соответствовать заданному. В
том случае, когда решение уравнения
(8) стремится к 0, из (6) следует, что
![]() . (4.5.10)
. (4.5.10)
Соотношение (10)
справедливо только для уравнения (8). В
случае уравнения (7)
![]() будет стремиться не к
будет стремиться не к![]() ,
а к некоторой окрестности (трубке)
вектора
,
а к некоторой окрестности (трубке)
вектора
![]() .
Диаметр этой трубки обусловлен внешним
воздействием уравнения (7). В случае,
когда этот диаметр мал, вектор
.
Диаметр этой трубки обусловлен внешним
воздействием уравнения (7). В случае,
когда этот диаметр мал, вектор![]() на практике можно отождествлять с
вектором
на практике можно отождествлять с
вектором![]() и использовать
и использовать![]() при формировании закона управления.
при формировании закона управления.
Уравнение (7)
представляет собой матричное инерционное
звено. Известно, что инерционное звено
является хорошим фильтром низких частот
(отфильтровывает высокочастотные
помехи), следовательно, частное решение
уравнения (7) будет иметь существенно
уменьшенные высокочастотные помехи,
т.е. динамический фильтр, помимо
восстановления (оценки) всего вектора
состояния объекта управления, будет
также отфильтровывать высокочастотные
погрешности датчиков и высокочастотные
внешние воздействия на объект. В том
случае, когда матрица
![]() выбрана так, что
выбрана так, что![]() является наилучшей среднеквадратической
оценкой вектора состояния объекта
является наилучшей среднеквадратической
оценкой вектора состояния объекта![]() ,
динамический фильтр называетсяфильтром
Калмана. В
том случае, когда матрица
,
динамический фильтр называетсяфильтром
Калмана. В
том случае, когда матрица
![]() выбирается из других соображений,
динамический фильтр называетсянаблюдателем
Льюэнбергера.
выбирается из других соображений,
динамический фильтр называетсянаблюдателем
Льюэнбергера.
Динамические
фильтры позволяют восстановить весь
вектор состояния и отфильтровать
высокочастотные воздействия на объект
и погрешности датчика. Однако не для
каждой системы можно построить
динамический фильтр. Для того чтобы
можно было построить динамический
фильтр, система должна быть полностью
наблюдаемой
(говорят, что пара матриц (![]() )
должна быть полностью наблюдаемой).
)
должна быть полностью наблюдаемой).
Система называется полностью наблюдаемой, когда её вектор состояния можно восстановить за сколь угодно малый промежуток времени.
Теорема 1. Система
является полностью
наблюдаемой
тогда и только тогда, когда матрица
наблюдаемости
![]() имеет
ранг, равный порядку системы
имеет
ранг, равный порядку системы![]() ,
где
,
где![]() – размерность вектора состояния системы
(
– размерность вектора состояния системы
(![]() ).
).
![]() (4.5.11)
(4.5.11)
Ранг матрицы
![]() равен
равен
![]() тогда и только тогда, когда из её блоков
можно составить матрицу
тогда и только тогда, когда из её блоков
можно составить матрицу![]() ,
определитель которой не равен 0.
,
определитель которой не равен 0.
Существует и другой, более удобный критерий полной наблюдаемости.
Теорема 2. Система
(1), (2) является полностью
наблюдаемой
тогда и только тогда, когда при
![]() из системы (1), (2) следует
из системы (1), (2) следует![]() .
Для применения этой теоремы удобнее,
когда система (1), (2) представлена в
скалярном виде, т.е. в виде системы
дифференциальных уравнений, причём не
обязательно в форме Коши.
.
Для применения этой теоремы удобнее,
когда система (1), (2) представлена в
скалярном виде, т.е. в виде системы
дифференциальных уравнений, причём не
обязательно в форме Коши.
Пример.
Исследовать наблюдаемость двигателя
постоянного тока при измерении только
угла
![]() .
.
Уравнения исследуемой системы имеют вид
![]() , (4.5.12)
, (4.5.12)
![]() , (4.5.13)
, (4.5.13)
![]() , (4.5.14)
, (4.5.14)
![]() . (4.5.15)
. (4.5.15)
В соответствии с
критерием полагаем
![]() ,
,![]() ,
,![]() .
.
Из уравнения (14)
следует
![]() ,
а из (13) –
,
а из (13) –![]() .
Таким образом, для системы (11)-(14) можно
построить наблюдатель, который будет
оценивать
.
Таким образом, для системы (11)-(14) можно
построить наблюдатель, который будет
оценивать![]() и фильтровать сигналы
и фильтровать сигналы![]() от высокочастотных составляющих.
от высокочастотных составляющих.