

3.8 Гармоническая линеаризация
Метод гармонической линеаризации (метод гармбаланса) – это метод исследования предельных циклов. Он позволяет определить условия существования и параметры возможных в нелинейных системах автоколебаний. Предельные циклы в фазовом пространстве системы разделяют его на области затухающих и расходящихся процессов. Между этими областями существуют предельные циклы. Поэтому знание параметров предельных циклов и их устойчивости или неустойчивости позволяет представить картину всех возможных процессов в системе и тем самым сделать заключение об устойчивости системы.
Идея гармонической линеаризации
Рассматривается система

Рисунок 3.8.1 – Структурная схема нелинейной системы
На рис. 1
![]() – статическая характеристика нелинейной
части системы,
– статическая характеристика нелинейной
части системы,
![]() – передаточная функция линейной части
системы.
– передаточная функция линейной части
системы.
В режиме предельных
циклов все переменные
![]() являются периодическими функциями
времени с постоянными амплитудами и
частотами.
являются периодическими функциями
времени с постоянными амплитудами и
частотами.
Предположим, что
![]() . (3.8.1)
. (3.8.1)
Данный метод
базируется на предположении, что на
входе нелинейного звена в режиме
предельного цикла имеет место
синусоидальный сигнал с амплитудой
![]() и частотой
и частотой![]() .
При прохождении через нелинейное звено
(рис. 2а) синусоидальный сигнал
деформируется. На рисунке 2б прямоугольная
синусоида 1 – выходной сигнал. Этот
сигнал можно разложить в ряд Фурье. На
рисунке 2б синусоиды 2 и 3 соответствуют
первым двум гармоникам разложения в
ряд Фурье.
.
При прохождении через нелинейное звено
(рис. 2а) синусоидальный сигнал
деформируется. На рисунке 2б прямоугольная
синусоида 1 – выходной сигнал. Этот
сигнал можно разложить в ряд Фурье. На
рисунке 2б синусоиды 2 и 3 соответствуют
первым двум гармоникам разложения в
ряд Фурье.
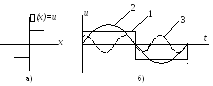
Рисунок 3.8.2 – Прохождение синусоидального сигнала через нелинейное звено
Поэтому, чтобы исходная предпосылка (1) выполнялась, линейное звено должно выполнять роль фильтра низких частот, т.е. фильтровать все гармоники за исключением самой низкочастотной гармоники (гармоники основной частоты). В этом случае говорят, что условие фильтра выполняется. Фильтрующие свойства звена определяются его АЧХ. На рис. 3 показан случай выполнения условия фильтра.
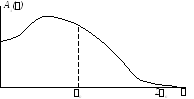
Рисунок 3.8.3 – АЧХ линейной части системы
Для определения,
является ли линейная часть системы
фильтром низких частот, нужно знать
частоты гармоник сигнала
![]() ,
разложенного в ряд Фурье. Но это в начале
исследования не известно. Поэтому
предполагается, что линейная часть
системы является фильтром низких
частот, т.е. выполняется условие фильтра.
,
разложенного в ряд Фурье. Но это в начале
исследования не известно. Поэтому
предполагается, что линейная часть
системы является фильтром низких
частот, т.е. выполняется условие фильтра.
Итак, предполагаем, что условие фильтра выполняется. Сигнал на выходе нелинейного звена предполагается разложенным в ряд Фурье
![]() , (3.8.2)
, (3.8.2)
где
![]() – коэффициенты разложения в ряд Фурье.
– коэффициенты разложения в ряд Фурье.
В выражении (2) отбросим высшие гармоники. Из выражения (1) можем записать
![]() , (3.8.3)
, (3.8.3)
из выражений (1) и (3) найдём
![]() , (3.8.4)
, (3.8.4)
подставим (4) в (2). Получим
![]() , (3.8.5)
, (3.8.5)
где
![]() . (3.8.6)
. (3.8.6)
Выражение (5) можно представить в виде
![]() ,
,![]() . (3.8.7)
. (3.8.7)
Выражение (7)
связывает сигнал
![]() с сигналом
с сигналом![]() точно так же, как и функция
точно так же, как и функция![]() .
Но выражение (7) является линейным, то
есть выражение (7) является линейной
аппроксимацией функции
.
Но выражение (7) является линейным, то
есть выражение (7) является линейной
аппроксимацией функции
![]() .
Поэтому вместо рисунка 1 можно
рассматривать схему, изображённую на
рис. 4.
.
Поэтому вместо рисунка 1 можно
рассматривать схему, изображённую на
рис. 4.

Рисунок 3.8.4 – Эквивалентная линейная структурная схема
Схема на рисунке
4 является полностью линейной. Таким
образом, осуществляется гармоническая
линеаризация. Коэффициенты
![]() и
и![]() называются коэффициентами гармонической
линеаризации. Эти коэффициенты
определяются нелинейностью
называются коэффициентами гармонической
линеаризации. Эти коэффициенты
определяются нелинейностью![]() и значениями коэффициентов
и значениями коэффициентов![]() разложения в ряд Фурье, которые, в свою
очередь, зависят от амплитуды
разложения в ряд Фурье, которые, в свою
очередь, зависят от амплитуды![]() .
.