

1.8 Устойчивость движения непрерывных линейных сау
САУ описывается системой дифференциальных уравнений. Если в системе имеются только один вход и один выход, то систему можно преобразовать к одному дифференциальному уравнению того же порядка, что и вся система. Пусть это дифференциальное уравнение записано в операторном виде (1)
![]() , (1.8.1)
, (1.8.1)
где
![]() – выходной сигнал;
– выходной сигнал;
![]() –входной сигнал;
–входной сигнал;
![]() –полиномы
(многочлены) оператора дифференцирования
–полиномы
(многочлены) оператора дифференцирования
![]() .
.
Пусть
![]() (1.8.2)
(1.8.2)
Уравнение (1)
является линейным неоднородным
дифференциальным уравнением. Его
решение состоит из двух слагаемых:
частного
решения (![]() )
иобщего
решения
соответствующего однородного уравнения
(
)
иобщего
решения
соответствующего однородного уравнения
(![]() ),
т.е.
),
т.е.
![]() .
.
В ТАУ общее решение называется собственным решением (движением), частное решение называется вынужденным решением (движением).
![]() . (1.8.3)
. (1.8.3)
Вынужденное решение удовлетворяет уравнению
![]() . (1.8.4)
. (1.8.4)
Вычитая (4) из (1), найдём уравнение собственных движений
![]() . (1.8.5)
. (1.8.5)
Уравнение (5) называется однородным уравнением для уравнения (1). Устойчивость или неустойчивость линейных САУ определяется только уравнением (5).
Будем различать 3 категории устойчивости:
1 – асимптотическая устойчивость,
2 – неустойчивость,
3 – граничная устойчивость.
Система называется асимптотически устойчивой, если при всех начальных условиях
![]() или
или![]() . (1.8.6)
. (1.8.6)
Система называется неустойчивой, если имеется хотя бы одно сочетание начальных условий, при котором
![]() . (1.8.7)
. (1.8.7)
Система называется
находящейся
на границе устойчивости (гранично
устойчивой),
если имеется хотя бы одно сочетание
начальных условий, при котором
![]() не стремится ни к нулю,
ни к бесконечности, а при других начальных
условиях выполняется условие (6).
не стремится ни к нулю,
ни к бесконечности, а при других начальных
условиях выполняется условие (6).
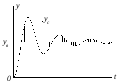
Рисунок 1.8.1 – Асимптотическая устойчивость
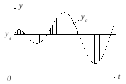
Рисунок 1.8.2 – Неустойчивость

Рисунок 1.8.3 – Граничная устойчивость
1.8.1 Корневые критерии устойчивости
Как следует из
рисунков 1.8.1-1.8.3,
![]() не равен тождественно нулю, тогда из
(5) следует
не равен тождественно нулю, тогда из
(5) следует
![]() . (1.8.1.1)
. (1.8.1.1)
Уравнение (1)
называется характеристическим
уравнением,
соответствующим уравнениям (1.8.1) и
(1.8.5). Пусть это уравнение будет n-го
порядка, тогда оно имеет n
корней
![]() .
Если коэффициенты
.
Если коэффициенты![]() – действительные, то корни уравнения
(1) могут быть действительными и
комплексными (комплексно-сопряженными).
– действительные, то корни уравнения
(1) могут быть действительными и
комплексными (комплексно-сопряженными).
![]() .
.
Корни могут быть простыми (нет им равных) и кратными (равными). Кратность – это количество равных корней. Если корни простые, то решение уравнения (1.8.5) можно представить в виде
![]() , (1.8.1.2)
, (1.8.1.2)
где
![]() – постоянные интегрирования, зависящие
от начальных условий.
– постоянные интегрирования, зависящие
от начальных условий.
В выражении (2) каждое слагаемое называется модой. Рассмотрим две моды, соответствующие паре комплексно-сопряженных корней.
![]() . (1.8.1.3)
. (1.8.1.3)
С помощью формулы Эйлера уравнение (3) можно представить в виде
![]() , (1.8.1.4)
, (1.8.1.4)
где
![]() – новые постоянные интегрирования,
зависящие от начальных условий. На рис.
4 представлены различные виды переходных
процессов моды (4) в зависимости от вида
корней, соответствующих данной моде.
– новые постоянные интегрирования,
зависящие от начальных условий. На рис.
4 представлены различные виды переходных
процессов моды (4) в зависимости от вида
корней, соответствующих данной моде.
На основании рис. 4 можно констатировать следующее.
Для того чтобы система была асимптотически устойчивой, необходимо и достаточно, чтобы действительные части всех корней характеристического уравнения были отрицательными.


Рисунок 1.8.4
Для того чтобы система была неустойчивой, достаточно, чтобы хотя бы у одного корня действительная часть была положительной.
Для того чтобы система была гранично устойчивой, необходимо и достаточно, чтобы у части корней действительные части были равны нулю, причём среди этих корней не должно быть кратных, а у остальных корней действительные части должны быть меньше нуля.
При наличии кратных
корней (например,
![]() )
вместо выражения (2) будет выражение
(5).
)
вместо выражения (2) будет выражение
(5).
![]() . (1.8.1.5)
. (1.8.1.5)
Выражение (5)
позволяет заключить, что при мнимом
корне
![]() нулевое решение будет неустойчивым за
счет выражения в скобках.
нулевое решение будет неустойчивым за
счет выражения в скобках.
Сформулируем приведенные критерии в геометрическом виде. На рис. 5 изображена плоскость корней, где крестиками обозначено расположение корней. С помощью этого рисунка приведенные критерии можно перефразировать следующим образом.
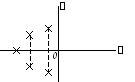
Рисунок 1.8.5 – Расположение корней в случае асимптотической устойчивости
Для того чтобы система была асимптотически устойчивой, необходимо и достаточно, чтобы все корни характеристического уравнения находились в левой полуплоскости.
Для того чтобы система была неустойчивой, достаточно, чтобы хотя бы один корень находился в правой полуплоскости.
Для того чтобы система была гранично устойчивой, необходимо и достаточно, чтобы часть корней находилась на мнимой оси, причём среди этих корней не должно быть совпадающих, а остальные корни должны лежать в левой полуплоскости.