

2.2 Аналого-цифровые и цифро-аналоговые преобразователи
В САУ с ЦВМ, как правило, входят АЦП и ЦАП. Процесс преобразования непрерывного сигнала в дискретный состоит из трёх этапов:
квантование по времени;
квантование по уровню;
кодирование.
Квантование по времени связано с последовательностью (очередностью) выполнения математических операций.
Квантование по
уровню
необходимо для представления информации
в цифровом виде. Это квантование
производится следующим образом: весь
диапазон изменения непрерывной величины
![]() разбивается на
разбивается на![]() равных частей
равных частей
![]() ,
,
где
![]() – шаг квантования по уровню (цена
младшего разряда). В результате сигнал
приобретает ступенчатый вид, показанный
на рис. 1.
– шаг квантования по уровню (цена
младшего разряда). В результате сигнал
приобретает ступенчатый вид, показанный
на рис. 1.
Кодирование представляет собой преобразование входного сигнала в двоичный параллельный код УЦВМ. Это преобразование осуществляется с помощью триггеров, механическая модель которых показана на рис. 2а. Триггер представляет собой устройство с двумя устойчивыми положениями равновесия. Одному положению

Рисунок 2.2.1
присваивается значение 0, другому – значение 1. Каждому разряду соответствует свой триггер. При перебрасывании триггера из положения «1» в «0» в старший разряд посылается сигнал на переключение соответствующего ему триггера и т.д. На рис. 2б представлена функциональная схема АЦП.

Рисунок 2.2.2 – Функциональная схема преобразователя АЦП
На рис. 2
![]() – непрерывный сигнал, который надо
преобразовать в двоичный параллельный
код,
– непрерывный сигнал, который надо
преобразовать в двоичный параллельный
код,
& – элемент «И», который срабатывает только тогда, когда на все его входы подаются отличные от 0 сигналы,
ГПИ – генератор последовательности импульсов,
![]() –сигнал обратной
связи.
–сигнал обратной
связи.
![]() –эталонное
напряжение,
–эталонное
напряжение,
![]() –количество
разрядов,
–количество
разрядов,
![]() –сигналы
соответствующих разрядов,
–сигналы
соответствующих разрядов,
![]() –весовые
коэффициенты разрядов.
–весовые
коэффициенты разрядов.
ЦАП входит составной частью в АЦП. Для многих цифровых систем шаг квантования сигнала по уровню является настолько малым, что эффект квантования по уровню вызывает несущественное влияние и им часто пренебрегают, однако в высокоточных системах его приходится учитывать.
2.3 Понятие о решётчатых функциях и разностных уравнениях
Цифровая САУ
получает входную информацию и выдаёт
выходную информацию в дискретные
моменты времени. Поэтому при исследовании
цифровых систем рассматривается их
поведение только в дискретные моменты
времени
![]() ,
где
,
где![]() такт счёта,
такт счёта,![]() – номер такта счёта. Для этого вводится
понятиерешётчатых
функций.
– номер такта счёта. Для этого вводится
понятиерешётчатых
функций.
Решётчатой называют функцию, которая существует лишь в дискретные равноотстоящие друг от друга значения времени и в промежутках между этими значениями равна нулю.
На рис. 1 сплошными
вертикальными линиями показана
решетчатая функция
![]() .
.
Непрерывной функции (пунктирная кривая) соответствует одна и только одна решётчатая функция, а одной решётчатой функции соответствует бесконечное количество непрерывных функций.
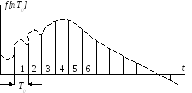
Рисунок 2.3.1
Часто в цифровых САУ используется безразмерное время. Пусть безразмерное непрерывное время определено выражением
![]() , (2.3.1)
, (2.3.1)
тогда безразмерное дискретное время будет
![]() (2.3.2)
(2.3.2)
Непрерывные системы обычно описываются дифференциальными уравнениями. Цифровые системы описываются разностными уравнениями. Рассмотрим разностные уравнения и их соотношения с дифференциальными уравнениями. Для операции дифференцирования можно записать
 ,
,
т.е. операции
дифференцирования с точностью до
коэффициента
![]() соответствует операция вычитания
(разность).
соответствует операция вычитания
(разность).
В безразмерном времени разности обозначают так:
![]() – первая прямая разность,
– первая прямая разность,
(2.3.3)
![]() – первая обратная разность,
– первая обратная разность,
где
![]() – оператор «дельта»,
– оператор «дельта»,![]() – оператор «набла».
– оператор «набла».
Аналогом второй производной по времени являются вторая прямая и обратная разности.
![]()
(2.3.4)
![]() .
.
Аналогично можно получить разности более высоких порядков.
Дискретным аналогом интеграла является полная сумма
![]() . (2.3.5)
. (2.3.5)
Выше была установлена связь между производной и конечными разностями и интегралом и суммой. Дифференциалы и интегралы используются для описания систем в непрерывном времени в виде дифференциальных и интегральных уравнений. Поведение цифровой системы в дискретные моменты времени описывается разностными уравнениями. Разностными уравнениями можно описать и непрерывную систему, но её поведение будет характеризоваться только в дискретные моменты времени. Рассмотрим связь между дифференциальными и разностными уравнениями на примере. Пусть дано дифференциальное уравнение
![]() . (2.3.6)
. (2.3.6)
С помощью полученных выше соотношений составляем разностное уравнение, используя обратные разности
![]() (2.3.7)
(2.3.7)
или
![]() , (2.3.8)
, (2.3.8)
или
![]() , (2.3.9)
, (2.3.9)
где
![]() . (2.3.10)
. (2.3.10)
Если
![]() ,
то разностное уравнение называетсяоднородным,
если
,
то разностное уравнение называетсяоднородным,
если
![]() ,
то разностное уравнение называетсянеоднородным.
,
то разностное уравнение называетсянеоднородным.
В общем случае разностное уравнение можно представить в виде
![]() (2.3.11)
(2.3.11)
(11) – разностное
уравнение k-го
порядка. Для его решения необходимо
знать начальные условия, т.е. значения
![]() в предыдущие моменты времени
в предыдущие моменты времени![]() .
.
Для преобразования
дифференциального уравнения в
алгебраическое используют оператор
дифференцирования
![]() .
Для решения разностного уравнения
путём сведения его к алгебраическому
уравнению используют оператор сдвига
.
Для решения разностного уравнения
путём сведения его к алгебраическому
уравнению используют оператор сдвига![]() ,
так что
,
так что
![]() и т.д. (2.3.12)
и т.д. (2.3.12)
С помощью оператора сдвига уравнение (11) перепишется в виде
![]() (2.3.13)
(2.3.13)
откуда формально можно записать
![]() , (2.3.14)
, (2.3.14)
где
![]() – передаточная функция цифровой
системы. Если в
– передаточная функция цифровой
системы. Если в![]() знаменатель приравнять к нулю, то
получится характеристическое уравнение,
соответствующее разностному уравнению
(11).
знаменатель приравнять к нулю, то
получится характеристическое уравнение,
соответствующее разностному уравнению
(11).
![]() . (2.3.15)
. (2.3.15)