

2.14 Порядок синтеза цифровых систем управления
Первый способ.
(Иващенко Н.Н. Автоматическое регулирование,
1978, с. 669-670). Рассматривается система с
неизвестной передаточной функцией
![]() ,
представленная на рис. 1, с обозначениями,
совпадающими с обозначениями рис. 2.8.2
и 2.8.6.
,
представленная на рис. 1, с обозначениями,
совпадающими с обозначениями рис. 2.8.2
и 2.8.6.
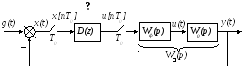
Рисунок 2.14.1 – Структурная схема САУ с ЦВМ
Задача:
найти закон управления
![]() в зависимости от
в зависимости от![]() .
.
Порядок синтеза.
1. Дискретная передаточная функция непрерывной части системы определяется по зависимости
![]() .
.
2. Находится дискретная передаточная функция разомкнутой системы
![]() .
.
3. С помощью
![]() -преобразования
(2.13.4) находим
-преобразования
(2.13.4) находим
![]() ,
,
где
![]() – неизвестная передаточная функция.
– неизвестная передаточная функция.
4. С помощью методов,
разработанных для непрерывных систем,
синтезируется
![]() .
.
5. С помощью
обратного
![]() -преобразования
(2.13.4) находится дискретная передаточная
функция
-преобразования
(2.13.4) находится дискретная передаточная
функция![]()
![]() ,
,![]() ,
,![]() .
.
6. По функции
![]() находится закон управления
находится закон управления
![]() .
.
В результате найден дискретный закон управления.
Второй способ (см. курсовую работу).
Сначала
рассматривается непрерывная система
управления с неизвестной передаточной
функцией
![]() .
.
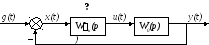
Рисунок 2.14.2 – Структурная схема эквивалентной непрерывной САУ с ЦВМ
С помощью известных
методов, разработанных для непрерывных
систем, синтезируется передаточная
функция
![]() ,
затем к
,
затем к![]() применяется
формула Тастина (2.10.8)
применяется
формула Тастина (2.10.8)
![]() ,
,
откуда аналогично (2.10.10) получаем
![]() . (2.14.1)
. (2.14.1)
В найденную
передаточную функцию
![]() делаем подстановку (1). Получаем дискретную
передаточную функцию корректирующего
звена, а по этой передаточной функции
находится дискретный закон управления.
делаем подстановку (1). Получаем дискретную
передаточную функцию корректирующего
звена, а по этой передаточной функции
находится дискретный закон управления.
3 Нелинейные системы автоматического управления
По математическому описанию САУ делятся на линейные и нелинейные. Нелинейной САУ называется САУ, содержащая хотя бы одно нелинейное звено, т.е. звено, описываемое нелинейными уравнениями. Математический аппарат исследования нелинейных САУ более сложен и менее универсален по сравнению с математическим аппаратом линейных САУ. Поэтому естественно желание разработчиков САУ заменить исследование нелинейных САУ исследованием близких им по динамике линейных САУ. В подразделе 1.1 был рассмотрен приём линеаризации гладких нелинейностей, основанный на разложении в ряд Тейлора.
В этом разделе будут рассматриваться нелинейные САУ, которые не могут быть линеаризованы с помощью разложения нелинейности в ряды Тейлора.
3.1 Основные нелинейные звенья
Наиболее часто
встречаются следующие нелинейные
звенья (правее статических характеристик
даны синусоидальный входной сигнал
![]() и выходной сигнал
и выходной сигнал![]() ):
):
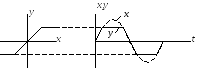
Рисунок 3.1.1 – Звено с насыщением
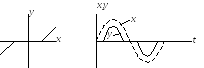
Рисунок 3.1.2 – Звено с зоной нечувствительности
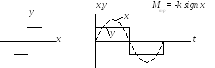
Рисунок 3.1.3 – Идеальное двухпозиционное реле (кулоново трение)
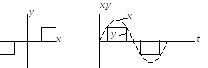
Рисунок 3.1.4 – Идеальное трёхпозиционное реле

Рисунок 3.1.5 – Двухпозиционное реле с гистерезисом

Рисунок 3.1.6 – Трехпозиционное реле с гистерезисом

Рисунок 3.1.7 – Петля гистерезиса (звено с мёртвым ходом)
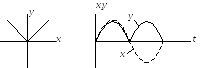
Рисунок 3.1.8 – Звено выделения модуля
Хотя нелинейности и затрудняют исследование САУ, они часто специально вводятся в систему управления, например, для компенсации уже существующих в системе управления нежелательных нелинейностей. Кроме того, оптимальные по быстродействию САУ всегда являются нелинейными.