

3.5 Исследование устойчивости методами Ляпунова
Методы исследования устойчивости Ляпунова позволяют исследовать устойчивость систем управления, описываемых линейными, нелинейными, дискретными, непрерывными, бесконечномерными уравнениями, а также уравнениями в частных производных.
Достоинство этого метода заключается в том, что для исследования устойчивости не требуется находить ни решения дифференциальных уравнений, ни рассчитывать корни.
Физическая суть
методов Ляпунова.
На рисунке 1 представлена фазовая
траектория асимптотически устойчивой
САУ. Стрелками указаны различные
положения радиус-вектора
![]() .
.
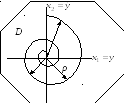
Рисунок 3.5.1 – Фазовый портрет асимптотически устойчивой траектории
Радиус-вектор изображающей точки на рис. 1 определяется выражением
![]() .
.
Условием асимптотической устойчивости являются условия
![]() ,
или
,
или
![]() .
.
Для системы
третьего порядка
![]() .
.
Для системы n-го
порядка
![]() .
.
Помимо перечисленных функций об асимптотической устойчивости можно судить и по другим функциям, например, для системы 2-го порядка
![]() .
.
Или другая четная функция
![]() .
.
Функция
![]() ,
с помощью которой удаётся судить об
устойчивости системы, называетсяфункцией
Ляпунова.
,
с помощью которой удаётся судить об
устойчивости системы, называетсяфункцией
Ляпунова.
Для функции Ляпунова характерно то, что она является всегда положительной и обращается в 0 только в начале координат.
Функция
![]() ,
зависящая от всех координат вектора
состояния, называетсяопределённо
положительной (отрицательной)
в области
,
зависящая от всех координат вектора
состояния, называетсяопределённо
положительной (отрицательной)
в области
![]() ,
содержащей начало координат, если в
этой области она везде положительна
(отрицательна) кроме начала координат
,
содержащей начало координат, если в
этой области она везде положительна
(отрицательна) кроме начала координат![]() ,
где она обращается в ноль.
,
где она обращается в ноль.
Функция
![]() называетсязнакоположительной
(знакоотрицательной),
если она в этой области удовлетворяет
соотношению
называетсязнакоположительной
(знакоотрицательной),
если она в этой области удовлетворяет
соотношению
![]() .
.
Признаками
асимптотической устойчивости системы
являются: существование для исследуемых
уравнений определённо положительной
функции
![]() и в любой момент времени
и в любой момент времени![]() ,
т.е.
,
т.е.![]() должна
быть определённо отрицательной.
должна
быть определённо отрицательной.
3.5.1 Теорема Ляпунова об асимптотической устойчивости
Рассмотрим систему нелинейных дифференциальных уравнений
![]() . (3.5.1.1)
. (3.5.1.1)
![]() –в общем случае
нелинейные функции.
–в общем случае
нелинейные функции.
Теорема Ляпунова.
Если для
системы (1) в области
![]() ,
содержащей начало координат, существует
определённо
положительная функция
,
содержащей начало координат, существует
определённо
положительная функция
![]() ,
полная производная которой по времени
,
полная производная которой по времени
![]() ,
взятая в силу системы (1), будет определённо
отрицательной,
то начало координат будет асимптотически
устойчивым при условии, что начальные
условия взяты из области
,
взятая в силу системы (1), будет определённо
отрицательной,
то начало координат будет асимптотически
устойчивым при условии, что начальные
условия взяты из области
![]() .
.
Пусть для системы (1) существует функция Ляпунова
![]() . (3.5.1.2)
. (3.5.1.2)
Фраза “полная производная по времени, взятая в силу системы (1)” означает следующее:
![]() . (3.5.1.3)
. (3.5.1.3)
Пример. Пусть дана система нелинейных уравнений
 (3.5.1.4)
(3.5.1.4)
Выберем в качестве функции Ляпунова функцию
![]() , (3.5.1.5)
, (3.5.1.5)
где
![]() . (3.5.1.6)
. (3.5.1.6)
В соответствии с (3) получим полную производную по времени.

Примечание: цифра над равенством указывает на то, что преобразование осуществлено с использованием формулы (4).
При выполнении условий (6) и
![]() (3.5.1.7)
(3.5.1.7)
функция
![]() (определенно отрицательна).
(определенно отрицательна).
Таким образом, при выполнении условий (6) и (7) начало координат системы (4) будет асимптотически устойчивым при любых начальных условиях, т.е. будет иметь место асимптотическая устойчивость в целом (глобальная устойчивость). Теорема Ляпунова дает достаточные условия асимптотической устойчивости.