

3.1.3 Момент импульса
Аналогом
импульса
![]() материальной точки при описании
вращательного движения является момент
импульса
материальной точки при описании
вращательного движения является момент
импульса
![]() .
Момент импульса – это вектор, который
имеет смысл только относительно выбранной
точки (например, – связанной с началом
отсчёта на осях координат). При этом так
же, как и любой другой вектор, момент
импульса можно представить в виде набора
из трёх проекций на оси X,
Y
и Z.
В этом случае говорят о моменте импульса
относительно оси (LZ,
например), который, как и любая проекция,
является уже скалярной величиной.
.
Момент импульса – это вектор, который
имеет смысл только относительно выбранной
точки (например, – связанной с началом
отсчёта на осях координат). При этом так
же, как и любой другой вектор, момент
импульса можно представить в виде набора
из трёх проекций на оси X,
Y
и Z.
В этом случае говорят о моменте импульса
относительно оси (LZ,
например), который, как и любая проекция,
является уже скалярной величиной.
П о
определению моментом
импульса материальной точки
А,
имеющей
импульс
о
определению моментом
импульса материальной точки
А,
имеющей
импульс
![]() ,
относительно
некоторой точки О называется векторное
произведение радиуса-вектора
,
относительно
некоторой точки О называется векторное
произведение радиуса-вектора
![]() ,
проведённого из О
в А,
на импульс
,
проведённого из О
в А,
на импульс
![]() :
:
![]() (3.8)
(3.8)
Напомним,
что, согласно определению векторного
произведения, по величине L
rpsin
(здесь
–
угол между векторами
![]() и
и
![]() );
направление
);
направление
![]() определяется
по правилу левой руки (или по
правилу буравчика),
см.
рис.
3.7.
определяется
по правилу левой руки (или по
правилу буравчика),
см.
рис.
3.7.
Моментом импульса системы точек (в том числе – тела) называется сумма моментов импульса всех точек, из которых эта система (тело) состоит.
Р ассмотрим
твёрдое тело, вращающееся вокруг
некоторой оси, проходящей через его
центр масс (рис. 3.8). При равномерном
вращении за одно и то же время все точки
тела поворачиваются относительно этой
оси на один и тот же угол
ассмотрим
твёрдое тело, вращающееся вокруг
некоторой оси, проходящей через его
центр масс (рис. 3.8). При равномерном
вращении за одно и то же время все точки
тела поворачиваются относительно этой
оси на один и тот же угол
![]() ,
то есть они имеют одинаковую угловую
скорость
,
то есть они имеют одинаковую угловую
скорость
![]() .
Кроме того, поскольку вектора линейных
скоростей
.
Кроме того, поскольку вектора линейных
скоростей
![]() (а, следовательно, и импульсов
(а, следовательно, и импульсов
![]() )
всех точек, из которых оно состоит, лежат
в плоскостях, перпендикулярных оси
вращения и (как при любом движении по
окружности) одновременно перпендикулярны
радиус-векторам
)
всех точек, из которых оно состоит, лежат
в плоскостях, перпендикулярных оси
вращения и (как при любом движении по
окружности) одновременно перпендикулярны
радиус-векторам
![]() ,
соединяющим ось с этими точками, все
углы i
между соответствующими векторами
,
соединяющим ось с этими точками, все
углы i
между соответствующими векторами
![]() и
и
![]() оказываются равными 90º. Это означает,
что для проекции момента импульса любой
точки под номером i
на ось
вращения можно записать:
оказываются равными 90º. Это означает,
что для проекции момента импульса любой
точки под номером i
на ось
вращения можно записать:
Li
ri
pisini
ri
pi
rimii
miri2![]()
miri2i
miri2.
miri2i
miri2.
Для проекции момента импульса всего тела на ось вращения:
L
![]()
![]()
![]()
![]()
I,
I,
где I – момент инерции данного тела относительно этой же оси.
Таким
образом, по аналогии с поступательным
движением, которое характеризуется
вектором импульса
![]() (его проекции pX,
pY
и pZ,
на оси координат: pX
MX,
pY
MY,
pZ
MZ),
для описания вращательного движения
абсолютно твёрдого тела вводится вектор
момента импульса
(его проекции pX,
pY
и pZ,
на оси координат: pX
MX,
pY
MY,
pZ
MZ),
для описания вращательного движения
абсолютно твёрдого тела вводится вектор
момента импульса
![]() .
Проекции этого вектора LX,
LY
и LZ
на оси координат равны, соответственно:
.
Проекции этого вектора LX,
LY
и LZ
на оси координат равны, соответственно:
LX IXX, LY IYY, LZ IZZ.
Для
момента импульса
![]() симметричного твёрдого тела,
вращающегося с угловой скоростью
симметричного твёрдого тела,
вращающегося с угловой скоростью
![]() ,
вокруг оси симметрии (относительно
которой его момент инерции равен I),
можно записать:
,
вокруг оси симметрии (относительно
которой его момент инерции равен I),
можно записать:
![]() I
I![]() .
(3.9)
.
(3.9)
Из формулы следует, что в этом случае направление момента импульса абсолютно твёрдого тела совпадает с направлением вектора его угловой скорости.
Единица измерения момента импульса в СИ – кгм2с1.
3.1.4 Момент силы
Для описания внешних воздействий на объект при вращательном движении удобно использовать понятие момента силы.
М оментом
силы
оментом
силы
![]() относительно
некоторой точки О
называется векторное произведение
радиуса-вектора
относительно
некоторой точки О
называется векторное произведение
радиуса-вектора
![]() ,
проведённого из О
в точку приложения силы на саму силу
,
проведённого из О
в точку приложения силы на саму силу
![]() :
:
![]() .
(3.10)
.
(3.10)
По
величине
M
rFsin,
где
–
угол
между
векторами
![]() и
и
![]() .
Направление
вектора
.
Направление
вектора
![]() определяется
по правилу левой руки (или по правилу
буравчика), рис. 3.9.
определяется
по правилу левой руки (или по правилу
буравчика), рис. 3.9.
Можно также говорить о проекции момента сил MZ на ось вращения Z. Данная проекция – скаляр и направления не имеет.
Произведение d rsin равно кратчайшему расстоянию от оси вращения до линии действия силы называется плечом силы. Поэтому можно записать:
MZ F d. (3.11)
Единица измерения момента силы в СИ – Нм (ньютон-метр).
Согласно
первому и второму законам Ньютона для
того, чтобы тело находилось в
состоянии покоя,
для сил, действующих на тело, должно
выполняться условие:
![]()
0. Аналогичным образом, для того, чтобы
тело находилось в
состоянии равновесия,
требуется, чтобы сумма моментов
всех сил, действующих на тело, равнялась
нулю:
0. Аналогичным образом, для того, чтобы
тело находилось в
состоянии равновесия,
требуется, чтобы сумма моментов
всех сил, действующих на тело, равнялась
нулю:
![]()
0.
(3.12)
0.
(3.12)
В этой формуле речь идёт о векторной сумме моментов сил; если же найти проекции этих моментов на некоторую ось (в качестве которой удобно выбрать ось возможного вращения тела), то подобную формулу можно записать для алгебраической суммы моментов сил относительно этой оси:
![]()
0.
(3.13)
0.
(3.13)
Моментам сил, стремящихся повернуть тело относительно оси по часовой стрелке, обычно приписывают знак «плюс», против часовой стрелки – знак «минус» (пример мы рассмотрим ниже).
С понятием момента силы связано определение центра тяжести тела – точки, которая, вообще говоря, не совпадает с его центром масс.
Центром тяжести тела называется точка, относительно которой сумма моментов сил тяжести всех частей, на которые можно мысленно разбить тело, равна нулю.
Если тело достаточно велико (например – это высокая башня цилиндрической формы, рис. 3.10), то её центр масс находится в геометрическом центре цилиндра. В то же время, вершина башни притягивается к Земле слабее, чем основание, поскольку, согласно закону Всемирного тяготения,
g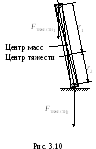
![]()

![]() ,
,
то есть величина ускорения свободного падения зависит от расстояния до центра Земли (а вершина башни отстоит от центра Земли дальше, чем её основание). Поэтому центр тяжести такого объекта находится ниже его центра масс, для которого должно выполняться условие равенства моментов сил тяжести верхней и нижней частей. Используя обозначения, представленные на рисунке и учитывая, что относительно оси, проходящей через центр тяжести перпендикулярно плоскости рисунка, момент силы FТЯЖЕСТИ1 стремится повернуть башню против часовой стрелки, а момент силы FТЯЖЕСТИ2 – по часовой стрелке, можно сказать, что
FТЯЖЕСТИ2r2 FТЯЖЕСТИ1r1 0.
Но, как мы отметили выше, FТЯЖЕСТИ1 FТЯЖЕСТИ2, следовательно, действительно: для выполнения данного равенства требуется, чтобы соблюдалось условие: r1 r2.
Если изменением ускорения свободного падения при переходе от одной части тела к другой можно пренебречь (например, если размеры тела много меньше размеров планеты), то тогда можно считать, что центр тяжести тела совпадает с его центром масс.