

4.2.2.2. Проектирование геодезических сетей сгущения с использованием gps-технологий
Использование GPS-технологий позволяет полностью исключить проблему неполной угловой привязки ГСС к исходной основе. Возможная схема проектирования GPS-построения сетевым способом при минимальном количестве исходных пунктов приведена на рис. 4.18.
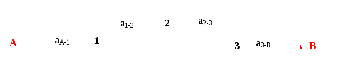
Рис. 4.18. Проектирование ГГС с использованием GPS-технологий
Контролем качества спутниковых определений является выполнение следующих геометрических условий:
 (4.20)
(4.20)
Отметим, однако, что величины невязок при таком варианте построения полигонометрического хода будут обусловлены как ошибками спутников определений, так и ошибками исходных данных (в ряде случаев влияние ошибок исходных данных может быть весьма существенным, намного превосходящим ошибки спутниковых определений).
Возможность контролировать высокоточными спутниковыми определениями точность исходной геодезической основы, заложена в варианте построения ГСС, изображенного на рис. 4.19.

Рис. 4.19. Проектирование ГГС с использованием GPS-технологий, позволяющих контролировать исходную основу
Геометрические условия этого варианта построения ГСС представляются в виде следующих уравнений:
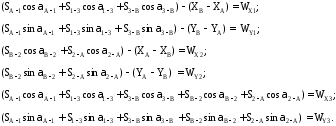 (4.21)
(4.21)
Допустимое значение геометрической невязки целесообразно считать по формуле
 (4.22)
(4.22)
где n – число базовых и определяемых векторов в ходе полигонометрии.
Анализ полученного вектора невязок приведен в табл. 4.14.
Таблица 4.14
Анализ вектора невязок спутниковых определений
|
Номер геометрического условия |
Название векторов, образующих геометрическое условие |
Полученная геометрическая невязка (м) |
Допустимое значение (м) |
|
1 |
aA-1, a1-2, a3-B |
+0,954 |
0,078 |
|
+0,754 | |||
|
2 |
aB-2, a2-A |
–0,924 |
0,062 |
|
–0,759 | |||
|
3 |
aA-1, a1-2, a3-B, aB-2, a2-A |
+0,030 |
0,099 |
|
–0,005 |
На основании полученных результатов можно отметить, что точность спутниковых определений соответствует инструментальной точности используемых GPS-приемников (геометрическое условие 3). Поэтому недопустимые величины невязок по 1-му и 2-му геометрическому условию указывают на очень большое влияние ошибок исходных данных. Такая величина ошибок исходных данных обусловлена или плохим качеством построения исходной геодезической сети, или потерей стабильности одного из исходных пунктов.
Для определения стабильности пунктов исходной геодезической основы с использованием GPS-аппаратуры необходимо выполнить дополнительные контрольные измерения не менее чем между тремя пунктами ОГС. Схема такого геодезического построения с дополнительными контрольными измерениями приведена на рис. 4.20.
Контроль стабильности исходных пунктов ОГС заключается в поочередном принятии в качестве исходного трех пунктов геодезического обоснования (А, В, С) и сравнении полученных координат с их первоначальными значениями (Δ).
 (4.23)
(4.23)
где I – номер анализируемого исходного пункта;
XИСХ, YИСХ – исходные координаты пунктов, приведенные в каталоге;
XGPS, YGPS – координаты анализируемых пунктов, полученные в результате математической обработки измеренных контрольных векторов.
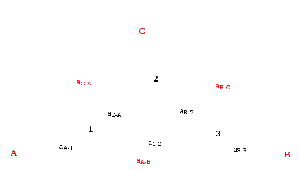
Рис. 4.20. Проектирование ГГС с использованием GPS-технологий для контроля стабильности исходной основы:
 –измеренные
векторы для определения стабильности
исходной основы;
–измеренные
векторы для определения стабильности
исходной основы;
 –измеренные
векторы в GPS-сети
сгущения;
–измеренные
векторы в GPS-сети
сгущения;
 –исходные
пункты геодезического обоснования;
–исходные
пункты геодезического обоснования;
 –определяемые
пункты GPS-сети
–определяемые
пункты GPS-сети
Таким образом, количество вариантов математической обработки будет равно числу анализируемых пунктов исходной основы.
Если величины ∆ не превосходят статистический критерий, то расхождение между координатами анализируемого пункта при доверительной вероятности β = 0,05 признается не значимым, находящимся в пределах точности спутниковых определений
 (4.24)
(4.24)
Например, при паспортной точности GPS-приемника mGPS = 2 мм + 2 мм · L(км) и средней длине линии в геодезическом построении L = 5 км численное значение критерия будет составлять 2,4 см.
Невыполнение статистического критерия (4.24) обозначает, что установлено перемещение пункта в пространстве, превосходящее точность спутниковых определений.
Наиболее стабильным будет считаться тот пункт, при принятии которого в качестве исходного отмечается минимальное значение следующего критерия стабильности:
 (4.25)
(4.25)
где j – номер варианта анализа стабильности исходной основы;
n – число анализируемых исходных пунктов.
Вычисления по предложенному алгоритму целесообразно выполнять в таблице следующего вида (табл. 4.15).
Таблица 4.15
Анализ стабильности пунктов исходной основы
|
Наз-вание |
Определяемые GPS-векторы |
Координаты |
Критерии (м) | ||||||||||||
|
Исходные |
GPS |
∆x(м) |
∆y(м) |
∆(м) | |||||||||||
|
∆x(м) |
∆y(м) |
X(м) |
Y(м) |
X(м) |
Y(м) | ||||||||||
|
Вариант 1. Исходный пункт А | |||||||||||||||
|
A |
|
|
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 |
0,000 | ||||||
|
|
0,005 |
5 000,004 |
|
|
|
|
|
|
| ||||||
|
B |
|
|
1,000 |
5 001,000 |
0,005 |
5 000,005 |
0,995 |
0,995 |
1,408 | ||||||
|
|
4 999,998 |
-5 000,003 |
|
|
|
|
|
|
| ||||||
|
C |
|
|
5 000,000 |
0,000 |
5 000,003 |
0,001 |
-0,003 |
-0,001 |
0,003 | ||||||
|
|
-5 000,003 |
-0,001 |
|
|
|
|
|
|
| ||||||
|
A |
|
|
0,000 |
0,000 |
0,000 |
0,000 |
|
|
0,813 | ||||||
Окончание табл. 4.15
|
Наз-вание |
Измеренные GPS-векторы |
Координаты |
Критерии (м) | ||||||||||||
|
Исходные |
GPS |
∆x(м) |
∆y(м) |
∆(м) | |||||||||||
|
∆x(м) |
∆y(м) |
X(м) |
Y(м) |
X(м) |
Y(м) | ||||||||||
|
Вариант 2. Исходный пункт В | |||||||||||||||
|
A |
|
|
0,000 |
0,000 |
0,995 |
0,995 |
-0,995 |
-0,995 |
1,408 | ||||||
|
|
0,005 |
5 000,004 |
|
|
|
|
|
|
| ||||||
|
B |
|
|
1,000 |
5 001,000 |
1,000 |
5 001,000 |
0,000 |
0,000 |
0,000 | ||||||
|
|
4 999,998 |
-5 000,003 |
|
|
|
|
|
|
| ||||||
|
C |
|
|
5 000,000 |
0,000 |
5 000,998 |
0,997 |
-0,998 |
-0,997 |
1,411 | ||||||
|
|
-5 000,003 |
-0,001 |
|
|
|
|
|
|
| ||||||
|
A |
|
|
0,000 |
0,000 |
0,995 |
0,995 |
|
|
1,151 | ||||||
|
Вариант 3. Исходный пункт С | |||||||||||||||
|
A |
|
|
0,000 |
0,000 |
-0,003 |
-0,001 |
0,003 |
0,001 |
0,003 | ||||||
|
|
0,005 |
5 000,004 |
|
|
|
|
|
|
| ||||||
|
B |
|
|
1,000 |
5001,000 |
0,002 |
5000,003 |
0,998 |
0,997 |
1,411 | ||||||
|
|
4 999,998 |
-5 000,003 |
|
|
|
|
|
|
| ||||||
|
C |
|
|
5 000,000 |
0,000 |
5 000,000 |
0,000 |
0,000 |
0,000 |
0,000 | ||||||
|
|
-5 000,003 |
-0,001 |
|
|
|
|
|
|
| ||||||
|
A |
|
|
0,000 |
0,000 |
-0,003 |
-0,001 |
|
|
0,815 | ||||||
Подчеркнутые в табл. 4.15 значения Δ обозначают установленное перемещение анализируемого пункта в пространстве.
Анализируя приведенные результаты модельных исследований, выполненных в табл. 4.15, можно отметить, что пунктом, потерявшим свою стабильность в пространстве, является исходный пункт В. Перемещения остальных исходных пунктов (А и С) являются не значимыми, находящимися в пределах точности GPS-измерений.
После выявления нестабильного исходного пункта он становится определяемым и схема для математической обработки результатов спутниковых определений может быть представлена в виде, приведенном на следующем рис. 4.21.
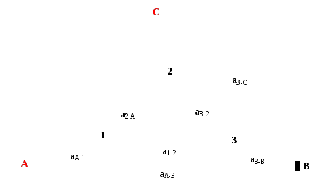
Рис. 4.21. Схема GPS-сети для совместной математической обработки всех результатов спутниковых определений
Отметим, что решение данного вопроса также может быть реализовано в виде уравнивания свободных геодезических сетей по алгоритмам, предложенным Ю.И. Маркузе в работе [40].
Более сложная задача возникает в том случае, когда при любом исходном пункте все критерии ∆ не будут удовлетворять статистическому условию (4.24). Такая ситуация, часто имеющая место на производстве, возникает, когда GPS-сеть по точности измерений намного превосходит СКО уравненных элементов исходной геодезической основы. Стандартная математическая обработка в этом случае приводит к существенному искажению параметров GPS-сети, обусловленному влиянием ошибок исходных данных.
Возможным выходом из данной ситуации является уравнивание с учетом ошибок исходных данных, также предложенное Ю.И. Маркузе и детально рассмотренное в работе [37]. Однако, для использования этих алгоритмов необходимо установить матрицу весовых коэффициентов исходной геодезической сети, что не всегда представляется возможным.