

4.2.2. Проектирование геодезических сетей сгущения
4.2.2.1. Проектирование геодезических сетей сгущения при использовании наземных средств измерений
Геодезические сети сгущения предназначены для сгущения ОГС и доведения плотности пунктов всего городского геодезического обоснования до 4 пунктов на 1 км2 для застроенной и 1 пункт на 1 км2 для незастроенной территории. ГСС создаются, как правило, методом полигонометрии в трехступенчатом варианте построения. В этом случае требования к ГСС представлены в табл. 4.9.
Городская полигонометрия проектируется в виде одиночных ходов или систем ходов с одной или более узловыми точками. В качестве исходных используются пункты ОГС.
Возможные схемы проектирования городской полигонометрии приведены на рис. 4.13.
Таблица 4.9
Требования к параметрам при проектировании ГГС
|
Параметры |
Класс или разряд ГСС | ||
|
4-й класс |
1-й разряд |
2-й разряд | |
|
Предельная длина хода (км) |
10 |
5 |
3 |
|
Число сторон в ходе |
15 |
15 |
15 |
|
Длина сторон в ходе (км) |
0,25–2,0 |
0,12–0,80 |
0,08–0,35 |
|
Точность измерения углов mβ |
3,0'' |
5,0'' |
10,0'' |
|
Допустимая угловая невязка fβ |
5,0'' |
10,0'' |
20,0'' |
|
Точность измерения линий mL/L |
1 : 40 000 |
1 : 20 000 |
1 : 10 000 |
|
Предельная относительная невязка |
1 : 25 000 |
1 : 10 000 |
1 : 5 000 |



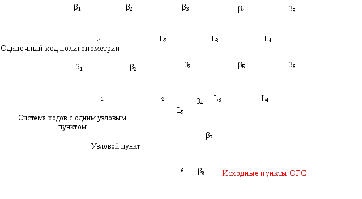
Рис. 4.13. Способы проектирования полигонометрии
Пункты ГСС располагаются на физической поверхности Земли, между ними должна быть обеспечена прямая оптическая видимость. Измеряемыми элементами являются углы и длины линий.
Для населенных пунктов городского типа (площадь менее 10 км2) ОГС не создаются. В этом случае городское геодезическое обоснование представлено только ГСС (см. табл. 4.4). Для такой территориальной зоны полигонометрия проектируется в виде замкнутой системы с одним исходным пунктом и несколькими исходными дирекционными углами (полная аналогия с первой ступенью ОГС). Пример такого построения приведен на рис. 4.14.
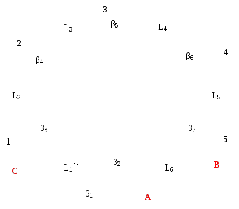
Рис. 4.14. Первая ступень ГСС в виде замкнутого хода полигонометрии
Однако следует иметь в виду, что при проектировании полигонометрии в полном геодезическом обосновании (в том случае, когда на территорию города создана ОГС) построение замкнутых ходов или сетей категорически запрещено и используется схема, приведенная на рис. 4.13.
Особенности проектирования и построения на местности городской полигонометрии заключаются в следующем:
Между исходными пунктами ОГС может быть утрачена видимость, поэтому в ходах полигонометрии возможна неполная угловая привязка к исходной основе (рис. 4.15).
В ряде случаев необходима повышенная точность измерения примычных углов (например, при расположении исходных пунктов ОГС на крышах высотных зданий и, как следствие, большие углы наклона на сторонах полигонометрии, примыкающих к исходным пунктам).
При построении полигонометрических ходов сгущения возможна угловая привязка к исходным знакам стенной полигонометрии (рис. 4.17).
Геодезические знаки, закрепляющие полигонометрические сети, могут располагаться в стенах зданий и сооружений (рис. 4.16).
Примером неполной угловой привязки к исходной основе могут служить варианты построения полигонометрических ходов, изображенные на рис. 4.15.
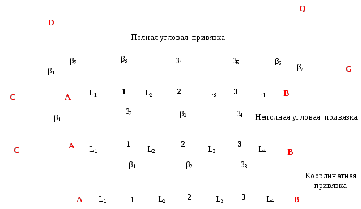
Рис. 4.15. Способы угловой привязки ходов полигонометрии к исходной основе
Следует отметить, что при неполной угловой привязке ходов полигонометрии к исходной основе уменьшается число избыточных измерений. Например, в ходе с неполной угловой привязкой число избыточных измерений составляет r = n – t = 8 – 6 = 2 (n – число всех измерений; t – удвоенное число определяемых пунктов), а в ходе с координатной привязкой r = n – t = 7 – 6 = 1. В то же время, в ходе, полностью привязанном в угловом отношении, число избыточных измерений составляет r = n – t = 9 – 6 = 3. Следовательно, в таких построениях возможно существенное снижение точности уравненных элементов, что необходимо обязательно учитывать при проектировании [4].
При использовании полной угловой привязки хода полигонометрии к исходной основе возможно измеренными примычными углами контролировать исходную основу. Для варианта, изображенного на рис. 4.15, этот контроль осуществляется на основании следующих уравнений:
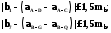 (4.12)
(4.12)
где mβ – нормативно заданная точность измерения углов в полигонометрическом ходе.
При выполнении условия (4.12) пункты исходной геодезической сети считаются стабильными, и угловая невязка в ходе полигонометрии будет характеризовать только влияние случайных ошибок геодезических измерений.
Схема передачи координат с наземного рабочего центра на стенные знаки при закреплении пунктов ГСС стенными знаками представлена на рис. 4.16.
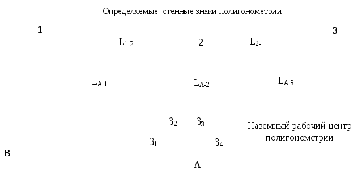
Рис. 4.16. Схема закрепления наземного центра полигонометрии стенными знаками
При проектировании такой схемы передачи координат необходимо, чтобы длины линий от наземного центра до стенных знаков были меньше длины мерного прибора (как правило, в качестве мерного прибора используется стальная 50-метровая компарированная рулетка). Измеряемыми элементами в этой схеме являются углы между сторонами наземной полигонометрии и направлением на стенные знаки i, а также соответствующие длины линий Li. Для контроля правильности передачи координат измеряют расстояния между стенными знаками полигонометрии (L1-2 и L2-3). Поскольку отражатель на стенных знаках установить весьма проблематично, при измерениях линейных элементов используют, как правило, стальную компарированную рулетку. Поэтому стенные знаки от наземного пункта полигонометрии желательно закладывать на удалении, не превышающем 50 м.
Математическая обработка результатов наблюдений заключается в вычислении координат определяемых знаков стенной полигонометрии (X1, YA; X2, Y2; X3, Y3) от известных координат наземного центра (XA и YA). Вычисление координат выполняется с использованием известной формулы геодезии для решения прямой геодезической задачи
 (4.13)
(4.13)
где I – текущий номер стенного знака;
A-I – дирекционный угол от наземного центра полигонометрии до стенного знака;
LA-I – длина линии от наземного пункта полигонометрии до стенного знака.
Контроль точности передачи координат осуществляется на основании сравнения измеренных длин линий между стенными знаками (L1-2 и L2-3) с их значениями, полученными по вычисленным координатам

 (4.14)
(4.14)
где Δ – установленный нормативно допуск на точность передачи координат от наземного центра на стенные знаки (Δ = 3 мм).
Математическая обработка результатов измерений при передаче координат на стенные знаки полигонометрии приведена в табл. 4.10, 4.11.
Таблица 4.10
Вычисление приращений координат на стенные знаки
|
Исходный дирекционный угол α |
Измеренные углы β |
Вычисленные дирекционные углы α |
Измеренные длины линий L(м) |
Вычисленные приращения координат | |
|
ΔX(м) |
ΔY(м) | ||||
|
αA-B 270о00'00'' |
β1 45о00'04'' |
αA-1 315о00'04'' |
LA-1 35,350 |
24,997 |
–24,996 |
|
|
β2 44о59'57'' |
αA-2 0о00'01'' |
LA-2 25,009 |
25,009 |
0,000 |
|
|
β3 44о59'59'' |
αA-3 45о00'00'' |
LA-3 35,359 |
25,003 |
25,003 |
Таблица 4.11
Вычисление координат стенных знаков
|
Исходные координаты наземного центра |
Вычисленные приращения координат |
Вычисленные координаты стенных знаков |
Контроль(м) | ||||||
|
XA(м) |
YA(м) |
ΔX(м) |
ΔY(м) |
X(м) |
Y(м) |
LИЗМ |
SВЫЧ |
Δ | |
|
1 000,000 |
1 000,000 |
24,997 |
–24,996 |
1 024,997 |
975,004 |
L1-2 24,997 |
S1-2 24,996 |
–0,001 | |
|
|
|
25,009 |
0,000 |
1 025,009 |
1 000,000 |
L2-3 25,002 |
S2-3 25,002 |
0,000 | |
|
|
|
25,003 |
25,003 |
1 025,003 |
1 025,003 |
|
|
| |
При построении полигонометрического хода сгущения более низкого класса (например, 1-го разряда) возможна его привязка к исходным знакам стенной полигонометрии более высокого класса (например, 4-го класса). Принципиальная схема такой привязки показана на рис. 4.17.
При проектировании этой схемы привязки полигонометрического хода к стенным знакам необходимо, чтобы величины измеряемых углов 1 и 2 были не менее 30о. Для контроля стабильности стенных знаков целесообразно между ними измерить расстояния (L1-2 и L2-3) и сравнить их со значениями, вычисленными по исходным координатам.
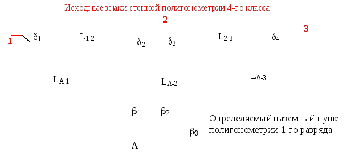
Рис. 4.17. Схема привязки хода к исходным знакам стенной полигонометрии
Математическая обработка результатов геодезических измерений при таком способе привязки полигонометрического хода к исходной основе заключается в использовании формул геодезии для решения обратной геодезической задачи. В этом случае вычисляются координаты определяемого пункта полигонометрии А и дирекционного угла А-В по исходным координатам стенных знаков 1, 2 и 3. Порядок вычислений заключается в следующем (табл. 4.12, 4.13).
Используя теорему синусов, для каждого треугольника вычисляют углы 1, 2, 3, 4 по следующим формулам:
 (4.15)
(4.15)
Контролируют правильность вычисления углов в треугольниках, используя геометрическое условие – сумма всех углов треугольника должна быть равна 180о
 (4.16)
(4.16)
Если условие (4.16) не соблюдается, то выполняют уравнивание вычисленных углов по обычным правилам геодезии.
По уравненным углам 1 и 3 вычисляют дирекционные углы от исходных стенных знаков полигонометрии до определяемого наземного пункта А:
 (4.17)
(4.17)
Вычисляют приращения координат от стенных знаков до наземного центра полигонометрии по формулам
 (4.18)
(4.18)
Вычисляют координаты определяемого наземного центра полигонометрии
 (4.19)
(4.19)
Контролем правильности вычислений, а также качества выполненных полевых измерений является совпадение значений координат определяемого пункта А (допустимое расхождение Δ не более 4 мм).
Таблица 4.12
Вычисление приращения координат от исходных стенных знаков до определяемого наземного центра
|
Вычисляемые углы δ |
Исходные дирекционные углы α |
Дирекционные углы от стенных знаков до определяемого пункта |
Измеренные длины линий (м) |
Вычисленные приращения координат | |
|
ΔX (м) |
ΔY (м) | ||||
|
δ 1 45о01'49'' |
α1-2 89о58'31'' |
α1-А 135о00'20'' |
L1-2 35,350 |
ΔX1-А –24,997 |
ΔY1-А 24,995 |
|
δ2 89о57'59'' |
α2-3 90о01'28'' |
α2-А 179о04'24'' |
L2-3 25,009 |
ΔX2-А –25,006 |
ΔY2-А 0,418 |
|
δ3 89о53'36'' |
|
|
|
|
|
|
δ4 45о00'41'' |
|
|
|
|
|
Таблица 4.13
Вычисление координат наземного центра
|
Исходные координаты стенных знаков |
Вычисленные приращения координат |
Вычисленные координаты наземного центра | ||||||
|
XA(м) |
YA(м) |
ΔX(м) |
ΔY(м) |
X(м) |
Y(м) |
X(ср) |
Y(ср) | |
|
X1 1 024,997 |
Y1 975,004 |
ΔX1-А –24,997 |
ΔY1-А 24,995 |
999,999 |
999,999 |
1 000,002 |
1 000,002 | |
|
X2 1 025,009 |
Y2 1 000,000 |
ΔX2-А –25,006 |
ΔY2-А 0,418 |
1 000,004 |
1 000,004 | |||