

4.3.6. Оценка точности проекта геодезической сети при планировании спутниковых определений
Оценку точности проектов GPS-построений для Государственных геодезических сетей наиболее целесообразно выполнять по разработанным алгоритмам и компьютерным программам Ю.И. Маркузе [36, 37, 41]. Вместе с этим, для локальных геодезических построений, на наш взгляд, допустим и алгоритм, рассмотренный в работе [2]. В этом алгоритме предлагается вектор спутниковых определений приращений координат представить в виде дирекционных углов и длин линий, для которых параметрические уравнения в индексном виде будут записаны в следующем виде:
 (4.51)
(4.51)
Например, если в геодезической сети, представленной на рис. 4.27, с использованием GPS-технологии измерены приращения координат между исходным пунктом А и наиболее слабым 5-м пунктом, то блок матрицы параметрических уравнений поправок для GPS-измерений в индексном виде будет выглядеть следующим образом (табл. 4.26).
Таблица 4.26
Блок матрицы параметрических уравнений поправок для GPS-измерений
|
|
ΔХ1 |
ΔY1 |
ΔХ2 |
ΔY2 |
ΔХ3 |
ΔY3 |
ΔХ4 |
ΔY4 |
ΔХ5 |
ΔY5 |
|
VαА-5 |
|
|
|
|
|
|
|
|
aA5 |
bB5 |
|
VL A-5 |
|
|
|
|
|
|
|
|
сosαА5 |
sinαА5 |
В таком комбинированном построении запроектированный вектор измерений состоит из случайных подвекторов yβ, yS и зависимых yα, yS. Точность данного вектора характеризуется корреляционной матрицей
 (4.52)
(4.52)
Для определения элементов блока матрицы PGPS используем паспортную точность GPS-приемника (σGPS) и «принцип равного влияния». При таком подходе имеем следующие характеристики точности дирекционного угла (m) и длины линии (mL):

 (4.53)
(4.53)
На основании формул (4.53) и с учетом условия (4.31) веса дирекционных углов и длин линий вычисляются с использованием следующего выражения:
 (4.54)
(4.54)
Достоинством предлагаемой методики является то обстоятельство, что этот алгоритм возможно применять как на этапе проектирования геодезического построения, так и на этапе уравнивания результатов измерений. По предложенному алгоритму составлена программа, позволяющая выполнять оптимальное проектирование геодезических построений, предназначенных для целей Государственного кадастра недвижимости.
4.3.7. Оптимальное проектирование геодезических сетей
При получении неудовлетворительных результатов, когда полученные СКО элементов запроектированной геодезической сети превосходят нормативные допуски, необходимо улучшить качество проекта, т. е. выполнить оптимизацию. Под оптимизацией будем понимать сравнение нескольких конкурирующих вариантов между собой и выбор наилучшего при заданном критерии оптимизации [60]. В качестве критерия оптимизации установим нормативно заданную точность взаимного положения пунктов в наиболее слабом месте геодезической сети mI-J = 5 см [46].
Улучшение качества проекта (выбор конкурирующих вариантов для оптимизации) в первую очередь может быть связано с увеличением точности линейных измерений относительно тех нормативных значений, которые приведены в табл. 4.17. Вторым, наиболее эффективным вариантом улучшения качества проекта геодезического построения, является увеличение числа избыточных измерений [60].
Сравнение конкурирующих вариантов проекта геодезического построения наиболее целесообразно осуществлять, сравнивая СКО наиболее слабых элементов или используя критерий, основанный на следе матрицы весовых коэффициентов (4.26)
 (4.55)
(4.55)
где n – число оцениваемых элементов, которые определяют качество выполненного проекта геодезического построения;
mi – средняя квадратическая ошибка оцениваемого элемента.
Рассмотрим, например, вариант оптимизации геодезической сети, изображенной на рис. 4.27. В сети запроектировано измерение всех углов по методике, соответствующей 4-му классу и для первого и второго варианта – два линейных измерения соответственно с относительной ошибкой mL/L = 1/200 000 и mL/L = 1/500 000 (отметим, что первая относительная ошибка соответствует требованиям нормативно-справочной литературы, а вторая – реальной точности используемых в настоящее время современных электронных тахеометров). В третьем варианте запроектировано измерение четырех сторон, четвертый вариант представляет линейно-угловое построение, пятый вариант представляет из себя сеть триангуляции с двумя измеренными длинами линий при наивысшей точности линейных измерений и два базисных вектора измеренных с использованием GPS-технологии при инструментальной точности mGPS = 2 мм + 2 мм · LКМ. Базисные векторы запроектировано определять между исходным пунктом А и определяемыми пунктами 2 и 3. В шестом варианте предусматривается перевести запроектированное линейно-угловое построение из 4-го во 2-й класс с нормативно заданной точностью угловых измерений mβ = 1'', а седьмой вариант оптимизации – спутниковая сеть в сетевом варианте определения базовых векторов. В сети средняя длина стороны составляет 5 км (отметим, что это максимальное значение, установленное нормативно для ОГС 4-го класса).
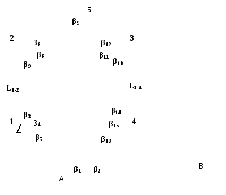
Рис. 4.28. Запроектированный вариант ОГС в виде триангуляции 4-го класса
Результаты оптимального проектирования городской триангуляции приведены в табл. 4.27.
Анализируя приведенные результаты, можно отметить следующие положения:
Увеличение точности линейных измерений при типовом варианте построения геодезической сети (варианты 1 и 2) практически не сказывается на точности уравненных элементов.
При построении геодезической сети с использованием типовой технологии 4-го класса ни один из рассматриваемых вариантов не позволяет получить заданный критерий оптимизации mI-J = 5 см.
Предлагаемый нормативными документами [27, 28, 29] критерий в виде средней квадратической ошибки определения длины линии в наиболее слабом месте mS не позволяет в полной мере оценить качество запроектированного геодезического построения и не может быть рекомендован для оценивания опорных межевых сетей.
Вариант, соответствующий заданному критерию оптимизации, возможно получить только в случае перехода от типовой технологии создания геодезического построения с 4-го ко 2-му классу (данная схема построения геодезической сети соответствует предложениям по оптимальной структуре ГО, приведенной в табл. 4.17).
Наиболее точные параметры соответствуют запроектированной GPS-сети в виде сетевого варианта.
В табл. 4.27 подчеркнутые номера вариантов обозначают, что они не соответствуют нормативно установленным допускам и, следовательно, должны быть исключены из анализа конкурирующих вариантов.
Таблица 4.27
Результаты оптимизации опорной геодезической сети
|
Класс ОГС |
Номер варианта |
Число измеренных сторон |
Число избыточных измерений |
Точность линейных измерений mL (см) |
СКО определения длин линий mS (см) |
СКО определения взаимного положения mI-J (см) |
СКО определения наиболее слабого пункта mI (см) |
Spk (см) |
|
4 |
1 |
2 (1-2, 3-4) |
7 |
2,5 см 1/200 000 |
mS(5-2) = 14,2 1/36 000 |
m5-2 = 18,9 1/26 000 |
m5 = 18,9 |
13,9 |
|
2 |
7 |
1 см 1/500 000 |
mS(5-2) = 14,1 1/36 000 |
m5-2 = 17,9 1/28 000 |
m5 = 17,9 |
13,5 | ||
|
3 |
4 (1-2, 3-4, 2-5, 3-5) |
9 |
1 см 1/500 000 |
mS(5-2) = 6,6 1/76 000 |
m5-2 = 10,4 1/50 000 |
m2 = 13,2 |
11,6 | |
|
4 |
Линейно-угловая сеть |
15 |
1 см 1/500 000 |
mS(5-2) = 1,0 1/500 000 |
m5-2 = 8,5 1/59 000 |
m2 = 10,3 |
8,5 | |
|
5 |
2 стороны и 2 вектора GPS |
9 |
1 см 1/500 000 |
mS(5-2) = 8,2 1/61 000 |
m5-2 = 10,9 1/46 000 |
m2 = 10,9 |
7,6 | |
|
2 |
6 |
Линейно-угловая сеть |
15 |
1 см 1/500 000 |
mS(5-2) = 0,9 1/550 000 |
m5-2 = 4,9 1/102 000 |
m5 = 5,4 |
4,5 |
|
7 |
Линейно-угловая сеть и 2 вектора GPS |
17 |
1 см 1/500 000 |
mS(5-2) = 0,9 1/550 000 |
m5-2 = 4,3 1/113 000 |
m5 = 4,9 |
4,3 | |
|
GPS |
8 |
Сетевой вариант |
6 |
- |
mS(5-2) = 0,9 1/550 000 |
m5-2 = 1,3 1/380 000 |
m5 = 2,9 |
3,5 |