

Метод контроля программ на основе полиноминальной интерпретации схем алгоритмов (программ)
В данном разделе представлен метод контроля программ по ГСА, где двоичное представление команд интерпретируется как двоичное представление коэффициентов полинома соответствующей степени.
Суть метода заключается в следующем. В ГСА выделяются линейные фрагменты, заключенные между двумя условными операторами.
Пример 4.15. На рис. 4.48 представлена ГСА; 7 линейных фрагментов, на которые она разбивается, приведены на рис. 4.49.
Каждому линейному фрагменту ставится в соответствие полином Мh(х):
![]()
где h – порядковый номер фрагмента; k – количество операторных вершин в линейном фрагменте; f – количество разрядов в двоичной комбинации каждой операторной вершины.
Рис. 4.48. Пример
ГСА
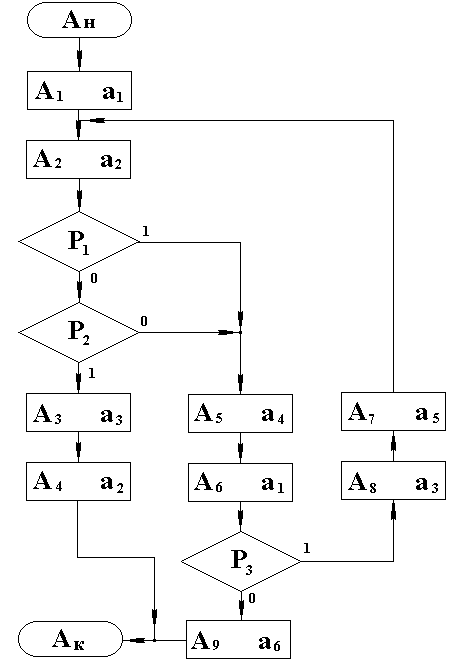
Пример 4.16. В табл. 4.2 (см. ниже) приведена двоичная запись каждой операторной вершины ГСА (см. рис. 4.48). Рассмотрим линейный фрагмент, показанный на рис. 4.49, в данной ГСА f = 4, для данного линейного фрагмента k = 2, так как во фрагмент входят две операторные вершины А5 и А6, которым соответствуют двоичные комбинации {a4a1}. Полином будет выглядеть следующим образом:
![]()
В окончательном виде для данного фрагмента
![]() .
.
Совокупность полиномов Mh(x) разбивается на два подмножества. К первому подмножеству относятся полиномы, описывающие последовательности, расположенные после начальной вершины Ан или единичного выхода условных вершин, а ко второму подмножеству – полиномы, описывающие последовательности, расположенные после нулевого выхода условных вершин.
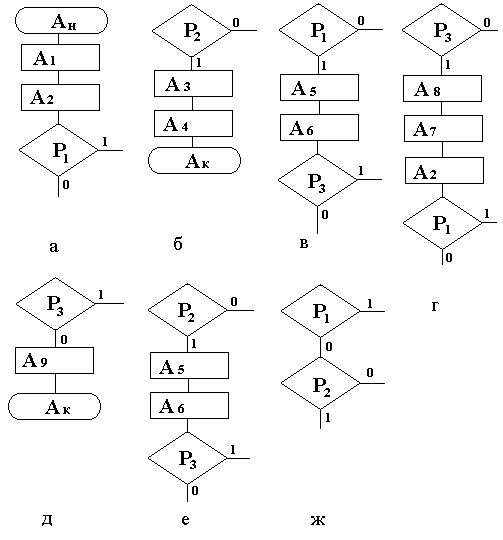
Рис. 4.49. Линейные фрагменты ГСА
Далее выбирается G(x) – проверяющий полином. Для упрощения преобразований рекомендуется выбирать проверяющий полином вида G(х) = хq + 1, где q кратно разрядности кода операторных вершин.
Для каждого подмножества выбирается Rэт(х) – эталонный остаток от деления Мh(х) на G(х). Если для какого-то полинома его остаток Rh(x) не совпадает с эталоном своего подмножества, то Mh(x) корректируется.
Полином Mh(x) приводится к эталонному остатку в два этапа.
Таблица 4.2
|
Разбиение ГСА на подмножества |
Подмножество 1 |
Подмножество Æ |
|
a1: 1011 a4: 0101 a2: 1101 a5: 0010 a3: 0110 a6: 1010 |
1. A1 – A2 2. A3 – A4 3. A5 – A6 4. A8 – A7 – A2 |
3. Æ |
|
|
Rh(x) |
k(x) | |
|
П1 |
|
0110 1011 1001 0000 |
0000 1101 А1д 1111 А3д 0110А4д |
|
П2 |
|
1010 1110 |
0000 0100А2д |
Первоначально выполняется преобразование
![]() ,
,
где M¢h(x) – полином, соответствующий последовательности, в которую введена пустая дополнительная вершина; M1h(x) – полином степени ( fz1–1), описывающий z1 операторных вершин, расположенных до введения пустой последовательности; M2h(x) – полином cтепени ( ft2–1), описывающий z2 операторных вершин, расположенных после введенной пустой вершины.
Затем
![]() ,
,
где M"h(x) – преобразовательный полином; k(х) – корректирующий полином степени q–1; t – коэффициент, определяющий расположение k(х) относительно фрагмента M¢h(x), соответствующего пустой вершине.
При этом
![]() .
.
Пример 4.17.
Выполним разбиение ГСА, приведенной на
рис. 4.48. Коды, соответствующие каждой
операторной вершине, и разбиение на
подмножества 1 и 0 приведены в табл. 4.2 .
Третий элемент подмножества 0,
представляющий собой пустое множество,
соответствует переходу по нулю из P1
в P2.
Элемент 3 подмножества 1 и элемент 2
подмножества 0 совпадают – {A5,
A6}.
Поэтому условие P1
инвертируется на
![]() и соответственно выход по 1 (0) меняется
на выход по 0 (1). Таким образом, в
подмножестве 1 будут элементы {A1,A2},
{A3,A4},
{A8,A6,A2},
{0}, а в подмножестве 0 – {A9},
{A5,
A6}.
и соответственно выход по 1 (0) меняется
на выход по 0 (1). Таким образом, в
подмножестве 1 будут элементы {A1,A2},
{A3,A4},
{A8,A6,A2},
{0}, а в подмножестве 0 – {A9},
{A5,
A6}.
В качестве проверяющего выберем полином G(x) = x4 + 1.
В табл. 4.2 приведены Rh(x) для каждого подмножества. Для подмножества 1 в качестве эталонного остатка выбран R1эт(х) = 0110, а для подмножества 0 R0эт(х) = 1010. Соответственно для каждого элемента указаны корректирующий полином k(x) и его обозначение.
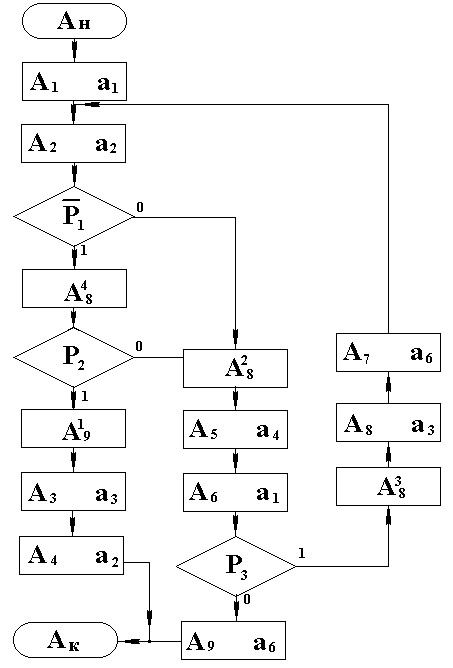
На рис. 4.50 приведена преобразованная ГСА с введенными диагностическими вершинами.
Рис. 4.50.
Преобразованная
ГСА
СВК для данного метода показана на рис. 4.51. На СВК возлагается выполнение следующих функций:
– формирование фактических остатков;
– хранение и выборка эталонных остатков;
– сравнение фактических и эталонных остатков;
– формирование сигнала диагностирования.

Рис. 4.51. СВК на основе полиноминальной интерпретации
СС – схема свертки, представляющая собой параллельный регистр сдвига с обратными связями, СХЭ – схема хранения эталонного остатка, выборка из которой определяется значением набора логических условий, соответствующего контролируемой последовательности. УУ формирует два дополнительных сигнала:
– признак диагностической вершины;
– признак конца последовательности.
Вероятность обнаружения дефектов по этому методу главным образом зависит от степени проверяющего полинома, как для дефектов механизма хранения, так и для дефектов механизма дешифрации команд:
Робн = 1 – 0,5q.
Kизб для данного метода равно 0, так как избыточных разрядов в команду не вводится.
Избыточное время зависит от количества линейных фрагментов, и в худшем случае
![]()
где Н0 – количество линейных фрагментов в нулевом подмножестве; Н1 – количество линейных фрагментов в единичном подмножестве; N – общее число команд.
Задержка обнаружения дефекта аналогична задержке по методу сигнатур. СВК реализуется несколько проще, чем для контроля сигнатур, но сложнее, чем для контроля с помощью раскраски, и не является самопроверяемой.