Блоковый контроль правильности хода программ с помощью сигнатур
В данном разделе более детально рассматривается реализация метода блокового контроля с помощью сигнатур. В качестве конкретного микропроцессора выбран микроконтроллер 1816ВЕ51. Рассматриваемый метод блокового контроля правильности хода выполнения программы (функциональной модели МП системы) основан на сравнении в конце выделенного блока команд эталонной сигнатуры с вычисляемой сигнатурой. Сигнатура в нашем случае – результат поразрядного сложения по модулю два байтов команд на шине данных, выполняемых по разомкнутому пути программы (блоку программы). Программа должна быть написана так, чтобы в конце оцениваемого пути сигнатура равнялась нулю. СВК фиксирует сигнал конца блока и сравнивает накопленную сигнатуру с нулем. Сигнал конца блока формируется СВК при выполнении команды
LCALL AC,
т.е. вызов подпрограммы по адресу, указанному во втором и третьем байтах команды, где АC – выделенные для СВК адреса из адресного пространства ПЗУ. СВК выделяет момент появления АC на адресной шине и стробирует сигнатуратор. По адресу АC в ПЗУ хранится команда RET (возврат из подпрограммы).
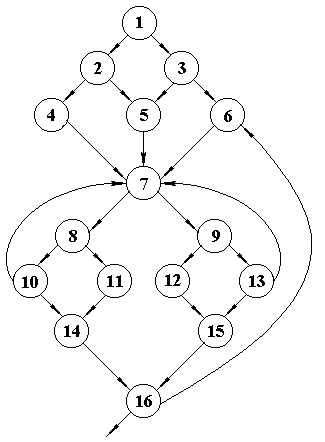
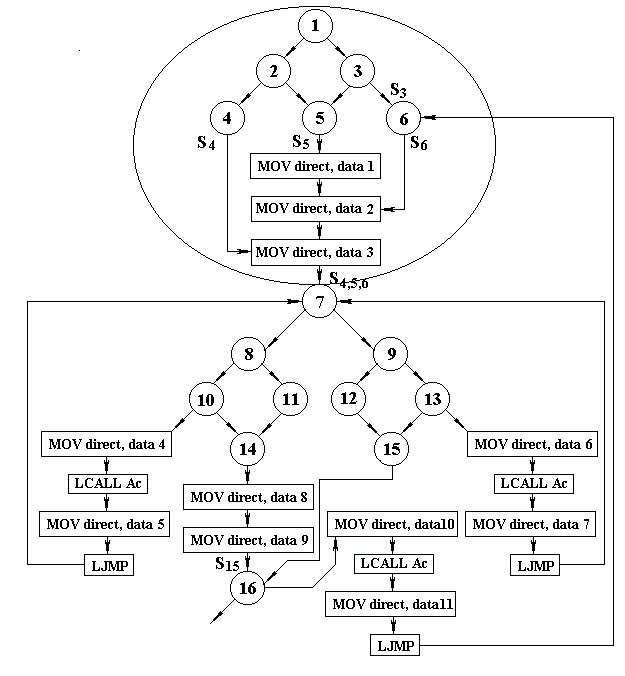
Рассмотрим пример. На рис. 4.45 приведена граф-схема фрагмента программы, где вершины соответствуют линейным участкам программы (в частном случае – одной команде), а на рис. 4.46 показана граф-схема этой программы с дополнительными командами, обеспечивающими равенство сигнатуры нулю в точках сравнения или требуемые значения в точках схождения и замыкания контуров (S4,5,6; S14,15; S3).
Рис.4.45.
Граф-схема
фрагмента программы
Выравнивание сигнатур выполняется при помощи команды
MOV direct,#data
Поле direct фиксировано и определяет адрес ячейки внутреннего ОЗУ, не используемой в рабочей программе. Меняя поле #data, можно добиться требуемого значения сигнатуры. Если значение поля direct принять равным коду команды, то сумма по модулю два кода команды и поля direct равна нулю. В этом случае, чтобы после выполнения выравнивающей команды сигнатура стала равной нулю, поле #data должно принять значение эталонной сигнатуры, полученное до выполнения этой команды.
Рассмотрим выделенный окружностью участок программы на рис. 4.46 (см. ниже). Пусть S4, S5, S6 – сигнатуры, вычисленные к моменту выполнения команд выравнивания по соответствующим путям. Пусть к моменту выполнения фазы 7 сигнатура S4,5,6 должна равняться нулю, независимо от того, по какому пути выполнился переход к 7.
Определим data 1, data 2, data 3:
S4 + data 3 = 0, отсюда data 3 = S4;
S6 + data 2 + data 3 = 0, отсюда data 2 = S6 + S4;
S5 + data 1 + data 2 + data 3 = 0, отсюда data 1 = S5 + S6.
В случае прерывания программ необходимо запомнить сформированную сигнатуру в стеке, а после завершения подпрограммы обработки прерывания – восстановить ее в сигнатураторе. Предлагается организовать стек в ОЗУ ЦП. Первые команды подпрограммы обработки прерывания должны обеспечить ввод в стек текущей сигнатуры с учетом сигнатуры команд, выполняющих ввод в стек.
Оценим объем дополнительной памяти (М) для команд, обеспечивающих реализацию рассматриваемого метода контроля. Пусть D – число команд, на которые выполняется переход больше чем из одного места программы (узловые команды), Si – число переходов к i-й узловой команде, С – число циклов в программе. Все команды, используемые для модификации программы, трехбайтные.
Рис. 4.46. Граф-схема
программы с дополнительными командами
Каждое сравнение сигнатуры с 0 требует выполнения трех команд:
MOV direct, #data – обеспечивает нулевую сигнатуру;
LCALL AC – инициирует момент сравнения;
LJMP – обеспечивает продолжение рабочей программы.
Таким образом,
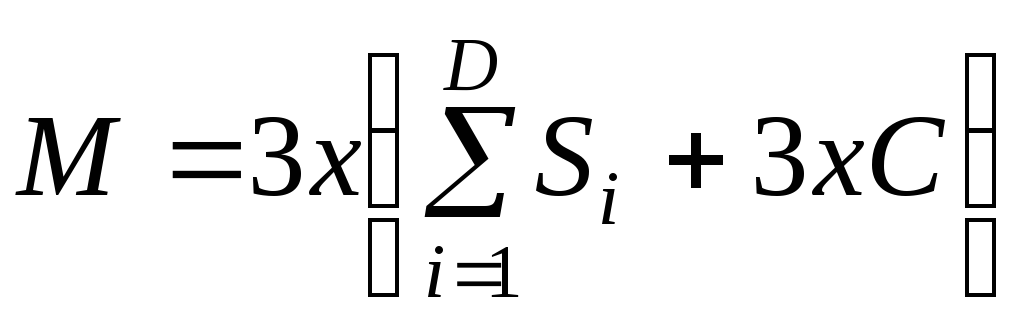 .
.
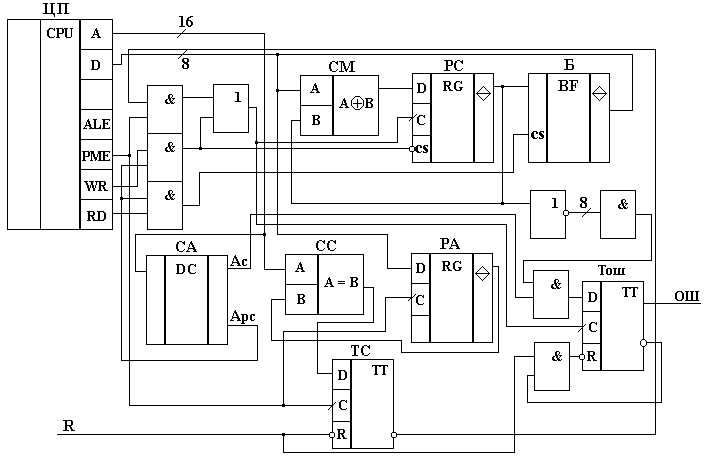
На рис. 4.47 приведена функциональная схема СВК, реализующая рассматриваемый блоковый метод контроля правильности хода выполнения программы для однокристального микроконтроллера 1816ВЕ51 как объекта контроля. Сигналы с шины данных ЦП поступают на первый вход, а сигналы из регистра сигнатуры (РгС) – на второй вход сумматора по mod2 (СМ). Результат сложения фиксируется по фронту сигнала РМЕ ЦП в РС. Содержимое РС может быть записано в ЦП через буфер Б или загружено из ЦП при выполнении команды MOV X. Для этого РС присваивается адрес Арс из адресного пространства внешнего ОЗУ. При загрузке РС переводится в третье состояние, это обеспечивает на втором входе сумматора все единицы и РгС < – D + 1...1.
Рис. 4.47. Функциональная
СВК, реализующая блоковый метод контроля