

Методы контроля механизмов дешифрации и хранения команд с помощью веса перехода
В методах, описанных в предыдущем разделе, каждая команда анализировалась независимо от остальных. В качестве альтернативного метода контроля можно предложить контроль механизмов дешифрации и хранения команд с помощью веса перехода.
Весом перехода W будем называть количество единиц в сумме по модулю двух соседних по ГСА команд. Под соседними будем понимать команды, соединенные на ГСА ребром.
Метод контроля заключается в следующем. В каждой команде в избыточных разрядах записывается вес перехода по отношению к предыдущей команде. Для начальной команды определяется вес перехода по отношению к нулевой комбинации. При работе программы предыдущая команда Ki складывается по модулю два с последующей командой Kj и вес перехода сравнивается с эталонным весом, записанным в избыточных разрядах команды Kj. Если команда Kj была выбрана неправильно или обнаружен дефект механизма хранения, вес перехода будет отличаться от эталонного. Данный метод контроля также предполагает использование диагностических вершин, так как в ГСА имеются разветвления и схождения.
Вершину, в которую входят два или более направленных ребра, назовем вершиной схождения, а соответствующую ей команду по ГСА – командой схождения.
Пример 4.12. Для ГСА (см. рис. 4.30) вершинами схождения будут вершины А5, А7 и А2, которые обведены на преобразованной ГСА (рис. 4.39).
Чтобы иметь возможность записать для вершины схождения эталонный вес перехода, необходимо обеспечить одинаковый вес перехода для всех пар команд с вершиной схождения в качестве последующей команды. Для обеспечения одинакового веса перехода у всех пар команд с вершиной схождения в качестве последующей команды вес, присущий максимальному количеству числа этих пар, принимается за общий, а в остальные пары вставляются диагностические вершины, подобранные так, чтобы обеспечить паре «диагностическая вершина – вершина схождения» общий вес. Можно ожидать, что подобрать диагностическую вершину для метода контроля по весу перехода будет труднее, чем при раскраске, так как здесь приходится иметь дело с распределением нулей и единиц в исходной команде. В общем случае выбор диагностической вершины зависит от набора команд микропроцессора и не всегда возможен.
Р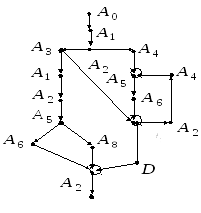 ис.
4.39. ГСА, преобразованная для контроля
по весу перехода
ис.
4.39. ГСА, преобразованная для контроля
по весу перехода
Пример 4.13. На рис. 4.39 представлена преобразованная схема ГСА (см. рис. 4.30) с введенными диагностическими вершинами. Распределения весов переходов для каждой пары команд приведены ниже:
W0_1 – 01011110 = 101
W1_2 – 01100011 = 100
W2_3 – 11111100 = 110
W3_1 – 10001101 = 100
W2_5 – 00011001 = 011
W5_8 – 10110110 = 101
W6_2 – 01101111 = 110
W2_4 – 01010010 = 011
W5_6 – 01110110 = 101
W8_2 – 10101111 = 110
W4_5 – 01001011 = 100
W6_7 – 10100110 = 100
W2_k – 10000111 = 100
W7_2 – 11001001 = 100
W3_7 – 00110101 = 100
W0 = 101
По рис. 4.39 видно, что для вершины схождения А5 в обеих парах соседней будет команда А4. Для вершины схождения А7 вес перехода А3 А7 равен весу перехода А6 А7, так что в эти пары вставлять диагностическую вершину не требуется. Для вершины схождения А2 вес перехода А6 А2 равен весу перехода А8 А2, но отличается от веса перехода А7 А2, поэтому в пару А7–А2 вставляется диагностическая вершина D, которая подбирается так, чтобы вес перехода D А2 был также равен 110.
ССВК для метода контроля по весу перехода представлена на рис. 4.40.
S2 S1
Она работает следующим образом. В регистр команды подаются основные разряды команды. Эти разряды складываются на первом сумматоре по модулю два с основными разрядами предыдущей команды. Для обработки начальной команды в регистре предыдущей команды предусмотрен сигнал «сброс», который переводит его в нулевое состояние. Дешифратор веса определяет вес перехода, который и записывается в регистр веса. Далее на втором сумматоре по модулю два полученный вес сравнивается с эталонным, поступающим из регистра эталонного веса, куда записываются избыточные разряды команды. В момент строба результат сравнения поступает на выход S2, а содержимое регистра команды переписывается в регистр предыдущей команды.
СВК является самопроверяемой, так как любая одиночная константная неисправность приводит к появлению на выходах S1S2 некодового слова {11} {00}, при этом любой выход на рабочих наборах побывает в 0 и 1.
Количество избыточных разрядов
![]() ,
,
tизб имеет верхней границей
где N – первоначальное количество команд в ГСА; kS – число вершин схождения; iS – количество схождений для каждой вершины схождения.
Вероятность обнаружения дефектов механизма дешифрации команд, в предположении о равномерном распределении весов переходов,
![]() .
.
При контроле механизма хранения обнаруживаются все однократные ошибки, в также все однонаправленные и асимметричные ошибки.
ССВК несколько сложнее, чем при контроле с помощью раскраски, и требует дополнительного введения четырех регистров. Сбои и отказы обнаруживаются в момент проявления. Для восстановления после сбоя достаточно вернуться на предыдущую команду.