

1. Основные теоретические сведения
В этом разделе будут приведены основные теоретические сведения из теории вероятности, теории надежности и теории нечетких множеств. Большая часть определений данного раздела используется в главах 2, 3 и 4. Если возникает специфика, связанная с предметом исследования (hard или soft), это будет отражено в соответствующих разделах.
1.1. Информационно-управляющие и инфокоммуникационные системы
Современные иерархические АСУ ТП могут быть представлены четырехуровневой пирамидой, состоящей:
– из уровня датчиков и исполнительных механизмов (нулевой уровень);
– контроллеров сети (первый уровень или уровень программируемых логических контроллеров);
– диспетчерского уровня (второй уровень);
– уровня конвергенции (третий уровень), который объединяет информационно-управляющие сети в единую распределенную информационно-управляющую сеть (РИУС).
Современные распределенные АСУ ТП используют на указанных уровнях различные технологии, в том числе Интернет, интранет, OPC-технологии и технологии «полевой шины» (fieldbus) [1].
Наличие в составе РИУС инфокоммуникационных и телемеханических (МСТМ, ИУС, АСДУ) систем позволяет РИУС реализовать межузловой обмен технологической, управленческой, конфигурационной и статистической информацией на произвольные расстояния.
РИУС – это основной класс систем для управления объектами критической инфраструктуры, такими как территориально-распределенные нефтепромыслы, нефте- и газопроводы, производство и распределение электроэнергии и др.
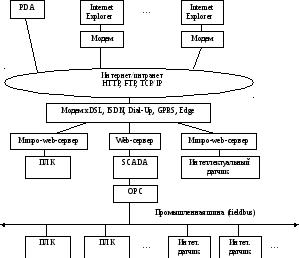
На рис. 1.1 представлена архитектура РИУС, использующая в качестве инфокоммуникационной среды Интернет. Интернет – не единственный вариант инфокоммуникационной системы (ИКС), однако его применение позволяет получить ряд преимуществ, связанных с практически повсеместным наличием этой сети, а также существованием разнообразных пользовательских сервисов и аппаратных продуктов для работы с Интернет.
В целом достоинствами РИУС являются [1]:
• снижение стоимости функционирования АСУ ТП вследствие удаленного управления (отсутствует необходимость присутствия человека на труднодоступном объекте);
• снижение стоимости обслуживания благодаря удаленной диагностике, отладке и обновлению программного обеспечения через ИКС;
• возможность контроля состояния производственного или технологического процесса или управления им через мобильный телефон;
• возможность
автоматического вызова аварийной службы
в случае срабатывания датчиков газа,
дыма, пламени, затопления и пр.
возможность
автоматического вызова аварийной службы
в случае срабатывания датчиков газа,
дыма, пламени, затопления и пр.
Рис. 1.1. Архитектура РИУС, использующей Интернет
Кратко охарактеризуем приведенные выше уровни иерархической РИУС (АСУТП) [1].
Низший (нулевой) уровень включает в себя датчики и исполнительные устройства. С датчиков начинается логическая цепочка процесса управления, а исполнительные устройства ее заканчивают.
Рассмотрим более подробно компоненты этого уровня.
Для измерения характеристик объектов существует огромное разнообразие датчиков (температуры, влажности, давления, потока, скорости, ускорения, вибрации, веса, натяжения, частоты, момента, освещенности, шума, объема, количества теплоты, тока, уровня и др.), которые преобразуют физическую величину в электрический сигнал.
В настоящее время наметилась устойчивая тенденция к использованию интеллектуальных датчиков, которые имеют цифровой интерфейс, встроенный микроконтроллер, память, сетевой адрес и выполняют автоматическую калибровку и компенсацию нелинейностей датчика. Интеллектуальные датчики в пределах сети должны обладать свойством взаимозаменяемости, в частности иметь один и тот же протокол обмена и физический интерфейс связи, а также нормированные метрологические характеристики и возможность смены адреса перед заменой датчика.
К исполнительным устройствам относятся реле-пускатели, контакторы, электромагнитные клапаны, электроприводы и др.
Первый уровень состоит из контроллеров (компьютеров) и модулей аналого-цифрового и дискретного ввода-вывода, которые обмениваются информацией по промышленной сети (Fieldbus) типа Modbus RTU, ModbusTCP, Profibus и др. Иногда модули ввода-вывода выделяют в отдельный уровень иерархии.
В автоматизированных системах вместо компьютера или одновременно с ним часто используют программируемый логический контроллер (ПЛК). Типовыми отличиями ПЛК от компьютера является специальное конструктивное исполнение (для монтажа в стойку, панель, на стену или в технологическое оборудование), отсутствие механического жесткого диска, дисплея и клавиатуры. Контроллеры также имеют малые размеры, расширенный температурный диапазон, повышенную стойкость к вибрации и электромагнитным излучениям, низкое энергопотребление, защищены от воздействий пыли и воды, содержат сторожевой таймер и платы аналогового и дискретного ввода-вывода, имеют увеличенное количество коммуникационных портов. В контролерах, в отличие от компьютеров, как правило, используется операционная система реального времени (например, Windows СЕ, QNX). Однако в последнее время наметилась тенденция стирания грани между компьютером и контроллером
Простейшие ИУС могут состоять только из устройств нулевого и первого уровня.
Второй (диспетчерский) уровень состоит из рабочих станций – компьютеров с человеко-машинным интерфейсом (ЧМИ, HMI – Human Machine Interface), ПО и ИО которых реализуют множество функций, обеспечивающих сбор, обработку, хранение, передачу, распределение, регистрацию и отображение технологической информации. Основой проектирования и эксплуатации современных РИУС (МСТМ,АСДУ) с заданными характеристиками, в том числе производительности и надежности, являются SCADA-пакеты.
Рассмотрим кратко действия диспетчера при управлении технологическим процессом. Диспетчер (оператор) осуществляет наблюдение за ходом технологического процесса или управление им с помощью мнемосхемы на экране монитора компьютера. Диспетчерский компьютер выполняет также архивирование собранных данных, записывает действия оператора, анализирует сигналы системы технической диагностики, данные аварийной и технологической сигнализации, сигналы срабатывания устройств противоаварийных защит, а также выполняет часть алгоритмов управления технологическим процессом.
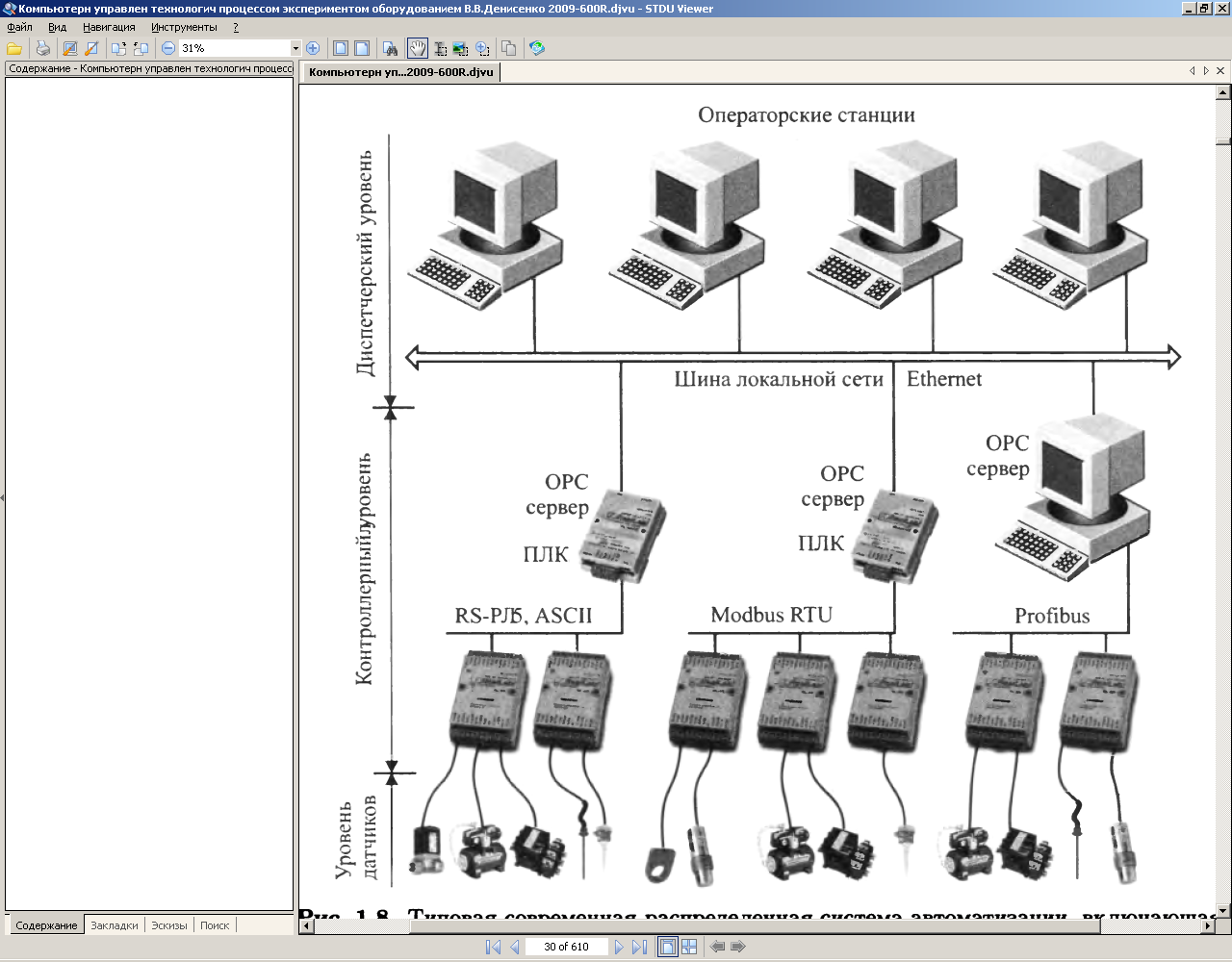
Благодаря объединению диспетчерских компьютеров в сеть наблюдение за процессами может быь выполнено с любого компьютера сети, но управление, во избежание конфликтов, допускается только с одного компьютера или функции управления разделяются между несколькими компьютерами. Права операторов устанавливаются средствами ограничения доступа сетевого сервера. Пример типовой современной распределенной ИУС, включающей уровни иерархии с нулевого по второй, приведен на рис. 1.2 [1].
![]()
![]()
![]()
Рис. 1.2. Типовая РИУС, включающая три уровня иерархии
Важной частью второго уровня являются также базы данных реального времени, являющиеся хранилищами информации и средством обмена с третьим уровнем иерархии системы управления.
Третий уровень появляется как средство интеграции систем. Если объект управления многофункционален и при этом каждая функция настолько сложна, что автоматизация ее требует отдельной ИУС, то на третьем уровне происходит объединение этих ИУС с помощью ИКС, в качестве которой выступает распределенная локальная или, чаще, глобальная сеть (см. рис. 1.1).
Одной из основных характеристик РИУС является надежность функционирования, на которую влияют как среднее времени наработки до отказа системы, так и среднее время восстановления отказавших компонентов системы. Среднее время восстановления, в свою очередь, во многом определяется наличием автоматизированной системы тестового диагностирования (АСТД) или схем встроенного контроля (СВК). Таким образом, чтобы спроектировать и эксплуатировать систему с заданными надежностными характеристиками необходимо изучить методы теории надежности и технической диагностики.
Указанные факторы обусловили тематику данного учебного пособия, в котором подробно рассматриваются методы обеспечения надежности восстанавливаемых и невосстанавливаемых устройств и систем, методы построения самопроверяемых устройств встроенного контроля, методы тестового диагностирования и другие вопросы. Приводятся многочисленные примеры применения этих методов для повышения надежности элементов и узлов ИУС и телекоммуникационных систем.