

4.1.3. Классификация диагностических процедур и их краткая характеристика
Различают два основных метода поиска отказавших элементов (диагностических процедур) – комбинационный и последовательный.
При использовании первого метода (комбинационный поиск) состояние системы определяется путем выполнения заданного числа проверок, порядок осуществления которых безразличен. Выявление отказавших элементов производится после проведения всех заданных проверок. С этой целью сопоставляются (анализируются) результаты проверок. Для этого метода характерны ситуации, когда не все результаты выполненных проверок необходимы для определения состояния системы.
При использовании второго метода (последовательный поиск) диагностики оптимизация процедуры последовательного поиска производится в общем случае двумя путями:
1) выбором необходимых проверок и восстановительных операций из всего множества заданных;
2) определением рациональной последовательности их выполнения.
Модели объектов диагностики, для которых строятся исключительно последовательные процедуры, удовлетворяют таким ограничениям:
1. В диагностируемой системе возможны лишь поэлементные проверки и общая проверка системы, устанавливающая факт работоспособности или отказа всей системы.
2. Отказы элементов независимы, т.е. определение работоспособности или отказа какого-либо элемента не «деформирует» распределение вероятностей отказов отдельных элементов.
Использование таких моделей целесообразно в двух случаях: в исследуемом объекте связи между выделенными элементами практически отсутствуют или использование этих связей для целей диагностики затруднительно либо ввиду многочисленности этих связей, либо из-за случайного характера связей, либо по каким-то иным причинам.
И наконец, поскольку многие сложные системы состоят из большого числа однотипных элементов, использование в разумных пределах поэлементных проверок упрощает конструкцию автоматических испытательных установок и используемые алгоритмы.
Будем говорить о двух видах процедур последовательного поиска (программ диагностики) – безусловной и условной. Под безусловной процедурой будем понимать такую, при которой порядок проведения поверок определяется заранее, до начала поиска, и в процессе поиска остается неизменным. Если же проверка на некотором j-м шаге назначается в зависимости от предыдущих j–1 проверок, то такую последовательную процедуру назовем условной. Вообще говоря, безусловная программа поиска есть частный случай условной.
Методы диагностики технического состояния систем можно поделить на детерминированные и вероятностные. Детерминированные методы можно поделить на методы с условной процедурой локализации дефектов и методы с последовательной процедурой локализации дефектов, а вероятностные методы – на методы локализации дефектов с использованием аппарата экспертных систем, методы с последовательной процедурой локализации дефектов (при этом на модель накладываются определенные ограничения) и методы с условной процедурой локализации дефектов (рис. 4.6).
Одной из широко применяемых на практике процедур технического диагностирования состояния сложных систем (в том числе и гибридных) является поиск отказавших элементов (устройств) и восстановление работоспособности методом замены элементов. Для указанной процедуры характерно использование описанных выше моделей. Суть метода состоит в следующем. Используя возможности поэлементной проверки устройств (узлов), определяют техническое состояние i-го элемента. Если проверяемый элемент исправен, то в соответствии с принятым критерием определяется следующий проверяемый элемент, иначе забракованный элемент заменяется на исправный и производится переход к следующему шагу процедуры (выбору очередного проверяемого элемента).
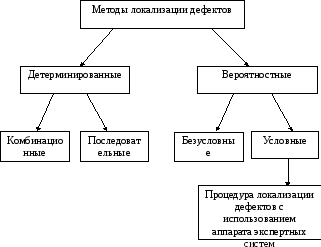
Рис. 4.6. Классификация процедур поиска и локализации дефектов
Простейшей разновидностью описываемой процедуры является следующая. В случае отрицательной реакции на выходе диагностируемой системы i-й подозреваемый элемент (i-й шаг процедуры) без проверки его технического состояния заменяется на заведомо исправный. Если система переходит в работоспособное состояние, то дефект считается обнаруженным, если нет – производится замена следующего элемента или блока. Таким образом, если до проведения некоторой проверки было известно, что система находится в одном состоянии из некоторого подмножества S k, то после проведения проверки можно указать подмножество Sl, в одном из состояний которого находится система, причем Sl S k.
Каждой проверке приписывается стоимость, отражающая затраты труда, времени, затраты на необходимую аппаратуру и т.д. Стоимость данной проверки является суммой стоимостей элементарных операций, ее составляющих, и, вообще говоря, зависит от того, какие проверки ей предшествовали. Поэтому последующие проверки, если при их выполнении используются ранее выполненные операции, могут иметь пониженную стоимость. Практические оценки стоимостей проверок сводятся к анализу стоимостей элементарных операций данной проверки.
Итак, при построении процедуры поиска отказов и восстановления работоспособности методом замены элементов, как уже было сказано выше, различают вероятностную и детерминированную диагностику. Если в модели объекта предполагается, что операция восстановления элементов производится лишь после установления факта их неработоспособности с вероятностью, равной 1, то будем говорить, что модель предполагает детерминированную диагностику. В этом случае средние затраты на восстановление работоспособности элементов зависят лишь от затрат на восстановление каждого элемента и вероятности обнаружения его отказа и не зависят от последовательности проверок. Следовательно, при оптимизации процедуры стоимости восстановления элементов могут быть исключены из рассмотрения. Поскольку в практике обслуживания технических систем довольно часто применяется детерминированная диагностика, оптимизации собственно поиска отказов уделяется большое внимание.
Если же проверка и замена элемента в случае обнаружения его отказа производятся на основании распределения вероятностей отказов, причем эти вероятности могут быть не равны 1, то такую диагностику назовем вероятностной. Упомянутое распределение вероятностей строится исходя из информации, полученной при проверках и заменах элементов. Отличительной чертой вероятностной диагностики методом замены элементов является факт использования замены элемента для получения информации о его состоянии.
Для нахождения оптимальной процедуры восстановления работоспособности должен быть задан критерий оптимальности. Таких критериев известно, по крайней мере, три: средняя стоимость восстановления работоспособности, вероятность восстановления работоспособности с ограниченной стоимостью, стоимость устранения отказов с заданной вероятностью. Эти критерии отражают различные практические условия. Так, при необходимости оптимизации многократного восстановления работоспособности наиболее естественна в качестве критерия средняя стоимость. Нетрудно указать ситуации, когда в качестве критериев задаются последние два, особенно если под стоимостью подразумевается время восстановления работоспособности.
Для решения задачи необходимы также некоторые дополнительные сведения об объекте (например, условные распределения вероятностей отказов элементов, если отказы зависимы) или ограничения, накладываемые на процедуру (например, порядок замен элементов).
Будем считать, что если проверка охватывает некоторую совокупность элементов, то по ее результатам можно судить лишь о состоянии данной совокупности элементов. О состоянии других элементов можно судить только по методу исключения.
Если информация, полученная в результате проведения проверки, свидетельствует об отказе хотя бы одного из проверенных элементов, будем говорить об отрицательном результате проверки. В противном случае результат проверки назовем положительным. Таким образом, каждая проверка разделяет все множество возможных состояний системы на два непустых подмножества, соответствующие положительному и отрицательному результатам проверки.
Весьма важными являются сведения о достоверности проверок. Количественной мерой достоверности проверок можно считать вероятности ошибок двух родов, возникающих по ряду причин. К этим причинам можно отнести следующие:
а) погрешности измерительных и контрольных приборов, погрешности формирования контрольных сигналов, помехи в каналах связи и т.п.;
б) отказы в диагностической системе;
в) отказы в объекте диагностики, имеющие перемежающийся характер, а также несовпадение времени проведения проверки со временем появления отказа в объекте.
Заметим, то перемежающиеся отказы в объекте диагностики могут быть причиной лишь ошибок первого рода – «пропуска» отказавших элементов. Остальные перечисленные причины могут вызвать как «пропуск» отказов, так и «ложные тревоги» – принятие работоспособных элементов за неработоспособные.
Таким образом, мы кратко рассмотрели различные процедуры поиска и локализации дефектов, приводящие к восстановлению работоспособности сложной системы.
В заключение отметим, что в последних разделах этой главы основное внимание будет уделено вероятностным процедурам локализации дефектов в сложных гибридных системах с использованием аппарата экспертных систем и нечетких множеств, как наиболее слабо освещенных в учебно-методической литературе.