

2.3.3. Определение среднего времени наработки на отказ системы с восстановлением
Время наработки на отказ (подразд. 2.1.1) определяется как
![]() .
.
В то же время преобразование Лапласа определяется следующей формулой [2]:
![]() (2.112)
(2.112)
т.е. при Z = 0 Т = P(Z).
Рассмотрим систему
из двух восстанавливаемых блоков, один
из которых основной, а другой –
резервный. Перепишем систему уравнений
(2.107), заменяя
![]() на
на![]() ,
с учетом того, что состояние 4 – состояние
отказа. В результате
,
с учетом того, что состояние 4 – состояние
отказа. В результате![]() ,
а также исчезает строка, соответствующая
,
а также исчезает строка, соответствующая![]() ,
,
 (2.113)
(2.113)
Среднее время
наработки на отказ всей системы
![]() ,
так как 1, 2, 3 – состояния работоспособности.
,
так как 1, 2, 3 – состояния работоспособности.
Пример 2.8. Пусть
![]()
Тогда

Решив систему, получаем:
![]()
Среднее время наработки на отказ
![]() ч.
ч.
2.3.4. Расчет надежности систем с восстановлением при основном (последовательном) и параллельном соединении элементов
Рассмотрим методику, приведенную в подразд. 2.3.2, для различных видов соединения элементов. Возьмем систему, состоящую из двух образцов оборудования, соединенных последовательно так, что отказ любого из них приводит к отказу всей системы (рис. 2.25). Для простоты предположим, что каждый образец имеет одинаковую интенсивность отказов и интенсивность ремонтов .
Предположим, что у нас имеется один ремонтник. Составим граф переходов системы (рис. 2.26).
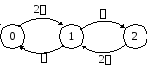

Рис. 2.25. Структура системы Рис. 2.26. Граф работоспособности системы
с последовательным соединением
Обозначим:
0 – состояние системы, в котором оба образца исправны;
1 – состояние системы, когда один образец исправен, а другой ремонтируется;
2 – состояние системы, когда оба образца неисправны, один ремонтируется.
Из состояния 0 система может перейти в состояние 1 с интенсивностью отказов 2. Из состояния 1 система может перейти в состояние 0 с интенсивностью восстановления и в состояние 2 с интенсивностью отказов . Из состояния 2 система может перейти в состояние 1 с интенсивностью восстановления .
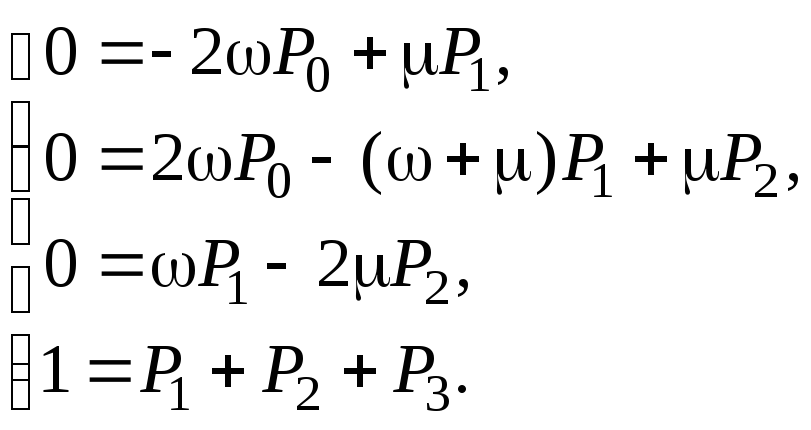
Запишем по графу переходов систему дифференциальных уравнений:
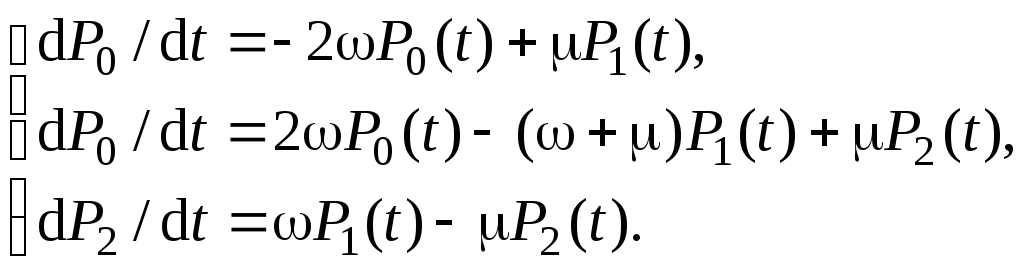 (2.114)
(2.114)
Будем искать решение только для установившегося значения. Тогда система дифференциальных уравнений перейдет в систему линейных уравнений:
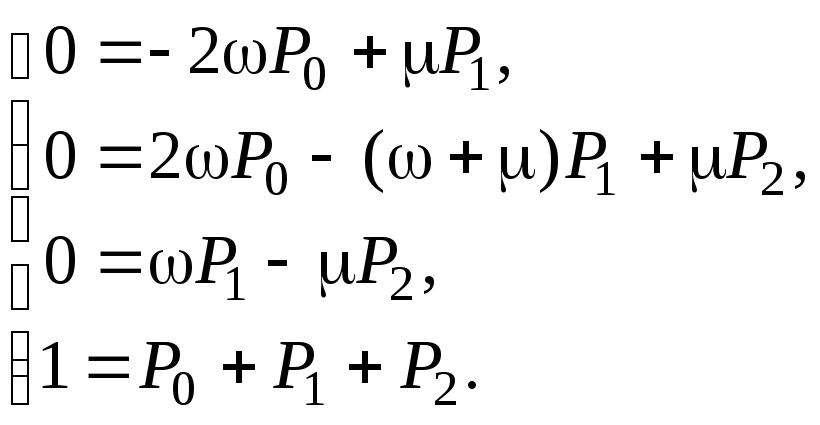 (2.115)
(2.115)
Отсюда коэффициент готовности
![]() (2.116)
(2.116)
Пример 2.9. Пусть = 102 1/ч, = 1 1/ч. Определить коэффициент готовности:
![]()
В общем случае, если у нас имеется n образцов оборудования и один ремонтник, справедлива формула:
 . (2.117)
. (2.117)
В качестве другого крайнего случая рассмотрим систему, когда количество ремонтников равно количеству образцов оборудования. Пусть на оба образца имеется два ремонтника. Составим граф перехода системы (рис. 2.27):
0 – состояние системы, в котором оба образца исправны;
1 – состояние системы, когда один образец исправен, а другой ремонтируется;
2 – оба образца неисправны и ремонтируются.
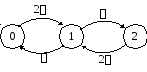
Рис. 2.27. Граф переходов системы
Запишем по графу переходов систему уравнений для установившегося значения:

Решая систему, получим:
![]() (2.118)
(2.118)
Пример 2.10. Пусть = 10–2 1/ч, = 1 1/ч. Определить коэффициент готовности:
![]()
В общем случае, если у нас имеется n образцов оборудования и n ремонтников,
![]() (2.119)
(2.119)
т.е. коэффициент готовности системы находится как произведение коэффициентов готовности каждого образца. Это и следовало ожидать, так как для каждого образца имеется свой ремонтник и Kг каждого образца не зависит от Kг остальных.
Рассмотрим систему из двух образцов оборудования, соединенных параллельно (рис. 2.28). Как уже указывалось, в этом случае отказ системы наступает только при отказе всех элементов системы.
Предположим, что у нас имеется один ремонтник, который сразу начинает ремонтировать отказавший элемент.
Составим граф переходов системы (рис. 2.29):
0 – состояние системы, в котором оба образца исправны;
1 – состояние системы, когда один образец исправен, а другой ремонтируется;
2 – оба образца неисправны, один ремонтируется.
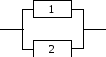
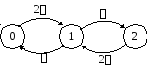
Рис. 2.28. Структура системы Рис. 2.29. Граф переходов системы
с параллельным соединением
Запишем по графу переходов систему уравнений для установившегося значения:
Решив систему, получим:
![]()
![]()
Коэффициент готовности
![]() (2.120)
(2.120)
Пример 2.11. Пусть = 10–2 1/ч, = 1 1/ч. Определить коэффициент готовности:
![]()
Имеется довольно многочисленный класс систем, в которых обслуживание невозможно начать до наступления полного отказа системы. Это может произойти, если контролируется только выход из строя всей системы, а не отдельных образцов оборудования. Допустим, у нас имеется 2 образца оборудования, соединенных параллельно. После того как откажет вся система, два ремонтника начинают ремонтировать каждый свой элемент.
Составим граф переходов системы (рис. 2.30):
0 – состояние системы, в котором оба образца исправны;
1 – состояние системы, когда один образец исправен, а другой неисправен, но не ремонтируется;
2 – состояние системы, когда оба образца неисправны и ремонтируются.
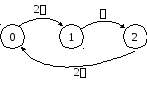
Рис. 2.30. Граф переходов системы
Запишем по графу переходов систему уравнений для установившегося значения:
Решив систему, получим:
![]()
![]()
Коэффициент готовности:
![]() (2.121)
(2.121)
Пример 2.12. Пусть = 10–2 1/ч, = 1 1/ч. Определить коэффициент готовности:
![]()
В данном разделе мы рассмотрели несколько вариантов расчета стационарного коэффициента готовности для систем с последовательным и параллельным соединением однотипных элементов. В случае параллельного соединения однотипных элементов коэффициент готовности при тех же параметрах потока отказов и восстановлений значительно выше, так как параллельное соединение одинаковых элементов означает наличие резервирования.
Однако примеры были выбраны минимальной размерности. Для реальных систем количество блоков будет значительно большим, параметры потока отказов и восстановлений – различными. Все это приводит к тому, что размерность графа переходов системы, как правило, оказывается чрезмерно большой для практических расчетов. В этих случаях граф можно сократить, отбросив состояния, вероятность пребывания в которых пренебрежимо мало. Технология сокращения графа переходов системы проиллюстрирована ниже на двух реальных примерах расчета надежности сложной телекоммуникационной системы.