

2.4.3. Система встроенного самоконтроля несамопроверяемая
Проанализируем вариант последовательного соединения блоков контролируемой системы. Пусть блок 1 охвачен встроенным контролем, а блок 2 – не охвачен (рис. 2.46).
 Состояния
системы:
Состояния
системы:
0 – Б1, Б2 и К исправны, система работоспособна;
1 – Б1 неисправен и ремонтируется, система неработоспособна;
2 – Б2 неисправен и ремонтируется, система неработоспособна;
3 – К неисправна и не ремонтируется, система работоспособна;
4 – Б1 и Б2 неисправны и ремонтируются, система неработоспособна;
5 – Б1 и К неисправны и ремонтируются, система неработоспособна;
6 – Б2 и К неисправны и ремонтируются, система неработоспособна;
7 – Б1, Б2 и К неисправны и ремонтируются, система неработоспособна.
Граф моделирования состояний работоспособности системы приведен на рис. 2.47.
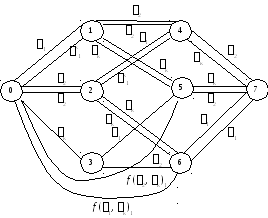
Рис. 2.47. Граф моделирования
Д ля
этого графа следует отметить отличительные
особенности. При переходе от состояния
7 к состоянию 6 (ремонт Б1) интенсивность
восстановления –1,
а не к1,
как и для предыдущего случая. На переходах
из состояния 6 в состояние 0 и из
состояния 5 в состояние 0 интенсивность
восстановления является соответствующей
функцией, как в подразд. 2.4.1.
ля
этого графа следует отметить отличительные
особенности. При переходе от состояния
7 к состоянию 6 (ремонт Б1) интенсивность
восстановления –1,
а не к1,
как и для предыдущего случая. На переходах
из состояния 6 в состояние 0 и из
состояния 5 в состояние 0 интенсивность
восстановления является соответствующей
функцией, как в подразд. 2.4.1.
Проанализируем вариант параллельного соединения блоков контролируемой системы (рис. 2.48). Пусть блок 1 охвачен встроенным контролем, блок 2 – не охвачен.
Состояния системы:
0 – Б1, Б2 и К исправны, система работоспособна;
1 – Б1 неисправен и ремонтируется, система работоспособна;
2 – Б2 неисправен и не ремонтируется, система работоспособна;
3 – К неисправна и не ремонтируется, система работоспособна;
4 – Б1 и Б2 неисправны и ремонтируются, система неработоспособна;
5 – Б1 и К неисправны и не ремонтируются, система работоспособна;
6 – Б2 и К неисправны и не ремонтируются, система работоспособна;
7 – Б1, Б2 и К неисправны и ремонтируются, система неработоспособна.
Граф моделирования состояний работоспособности системы приведен на рис. 2.49.

Рис. 2.49. Граф моделирования
Отличительная особенность графа – на переходе из состояния 7 в состояние 0 (ремонтируются все блоки, включая систему контроля) интенсивность восстановления является сложной функцией и зависит от того, как будет организован ремонт.
Если все три блока ремонтируются одновременно тремя ремонтниками, то
![]() (2.125)
(2.125)
Если все три блока ремонтируются одним ремонтником, то, учитывая, что время восстановления системы будет равно сумме времени восстановления всех трех блоков, применяют соотношение:
![]() . (2.126)
. (2.126)
Если неизвестно, как будет организован ремонт, можно взять среднее значение.
Далее расчет по графам ведется в соответствии с методикой, изложенной в подразд. 2.3.2.
2.5. Расчет надежности в условиях нечетко заданных исходных данных
Данный раздел посвящен проблеме расчета надежности сложных технических систем в процессе их проектирования при нечетко заданных исходных данных. Такая постановка задачи встречается в реальных условиях достаточно часто по двум причинам. Во-первых, надежностные характеристики отдельных блоков системы не всегда можно установить достаточно точно, в ряде случаев техническая документация дает разные значения, а иногда они и вовсе не указаны, и проектировщику приходится руководствоваться собственным опытом. Во-вторых, проектируемая система может работать в неблагоприятных условиях, и тогда реальные надежностные характеристики будут отличаться от тех, которые указаны в документации и справочной литературе.
Расчет надежности систем при нечетко заданных исходных данных практически не освещен в учебно-методической литературе, в отличие от стандартного расчета надежности системы при надежностных характеристиках, заданных детерминированно. Учитывая изложенное, в данном разделе основной упор будет сделан не на методику расчета надежности, а на ее модификацию применительно к нечетко заданным исходным данным [4]. Для упрощения изложения в качестве примера проектируемой системы будет взят самый простой ее вариант, поскольку алгоритм расчета надежности в условиях нечетко заданных исходных данных не зависит от сложности проектируемой системы.
Система может быть собрана из блоков различных типов. Надежностные характеристики блоков, составляющих систему, при этом рассматриваются как известные с определенной вероятностью. Достаточно хорошие возможности для этого предоставляет описание надежностных характеристик блока системы в форме нечеткого множества. Проектировщик (заказчик), задаваясь различными значениями, к примеру, среднего времени наработки на отказ, формулирует степень своей уверенности в реализации каждого из них с помощью показателя, именуемого «степенью принадлежности» и принимающего значения в диапазоне от 0 до 1 [1]. Чем хуже показатель с точки зрения надежности, тем выше степень уверенности в его реализации.
Предполагается, что в проектируемой системе отсутствует аппаратная избыточность, т.е. встроенные технические средства повышения надежности, такие как резервирование или дублирование, а системы встроенного функционального и тестового контроля обладают идеальными характеристиками: надежностью, полнотой контроля и глубиной локализации. В этом случае надежностные показатели блоков и методика расчета системы зависят от того, является она восстанавливаемой или невосстанавливаемой.
Рассматриваемая в настоящем разделе задача проектирования формулируется следующим образом: выбрать из нескольких заданных вариантов построения неизбыточной системы такой вариант, который минимизирует стоимость системы при надежности системы не хуже заданной.
Сформулируем алгоритм выбора (рис. 2.50).
Р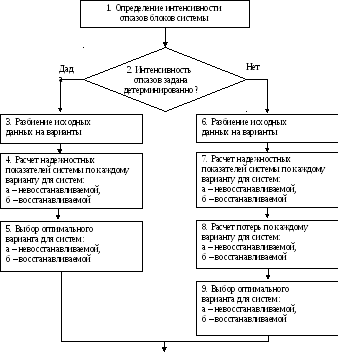 ис.
2.50. Алгоритм
выбора оптимального варианта построения
невосстанавливаемой системы в условиях
нечеткого задания исходных данных
ис.
2.50. Алгоритм
выбора оптимального варианта построения
невосстанавливаемой системы в условиях
нечеткого задания исходных данных
В соответствии с блоком 1 проектировщик определяет надежностные показатели блоков системы. В процессе определения показателей проектировщик в соответствии с блоком 2 выясняет, будет ли интенсивности отказов задана детерминировано или нет? Если да, то выбор оптимального варианта пойдет по левой ветви, если нет, то по правой. Последовательность шагов по левой и правой ветви в основном одинаковая. В блоках 3 (левая ветвь) и 6 (правая) выбираются возможные варианты построения системы. В блоках 4 (левая ветвь) и 7 (правая) рассчитываются надежностные показатели по каждому варианту построения системы. Далее при нечетко заданных исходных данных в блоке 8 правой ветви по каждому варианту рассчитываются потери от неверного выбора исходных надежностных показателей. И, наконец, в блоках 5 (левая ветвь) и 9 (правая) выбирается оптимальный вариант построения системы. В предыдущем разделе в примерах 2.13 и 2.14 был рассмотрен расчет надежности систем, структура которых уже была зафиксирована. Соответственно, в обоих случаях путь продвижения по алгоритму был: 1 – 2 – 4б.
Рассмотрим более сложные случаи реализации блоков данного алгоритма для невосстанавливаемых и восстанавливаемых систем, когда есть несколько вариантов построения системы.