

§ 12. Системы координат
В фотограмметрии положение точки местности определяется в левой системе прямоугольных координат Гаусса OГXГYГZГ, принятой в геодезии, или в правой прямоугольной системе координат OXYZ, называемой фотограмметрической системой (рис. 23).
Начало и направления осей фотограмметрической системы координат можно выбрать произвольно. В частном случае начало совмещают с какой-либо точкой местности, например с точкой А или с центром проекции S, а плоскость XY устанавливают горизонтально.
При решении фотограмметрических задач на большие расстояния, а также в случае космических исследований применяют правую геоцентрическую систему координат O'ГX′ГY′ГZ′Г (рис. 24). Начало этой системы — в центре земного эллипсоида, ось Z′Г совмещена с полярной осью О′Г Р, а ось X′Г установлена в плоскости начального меридиана.
Для решения по снимкам нетопографических задач, например для составления фронтального плана архитектурного сооружения или для исследования деформации моста, обычно применяют фотограмметрическую систему координат.
Положение точки на аэроснимке или космическом снимке определяется в плоской правой прямоугольной системе координат о'ху (рис. 25). Начало координат находится в пересечении прямых, соединяющих координатные метки 1 и 2, 3 и 4. Ось х совмещают с прямой 1—2 (рис. 25, а) или устанавливают параллельно прямой 3—2 (рис. 25, б).
Плоские координаты точки снимка измеряют при помощи компаратора или стереокомпаратора.
Кроме плоской системы координат для определения положения точки снимка служит пространственная система SXYZ с началом в центре проекции S (рис. 26). Координатные оси этой системы параллельны соответствующим осям фотограмметрической системы OXYZ или осям системы координат, принятой в геодезии.
Чтобы найти зависимость между пространственными и плоскими координатами точки снимка, введем вспомогательную систему координат Sxyz, оси х и у которой параллельны соответствующим осям плоской системы координат оху, а ось z совпадает с главным лучом So. Координаты точки снимка в системе Sxyz будут х, у и z = —f.

Используя формулы преобразования координат, получим
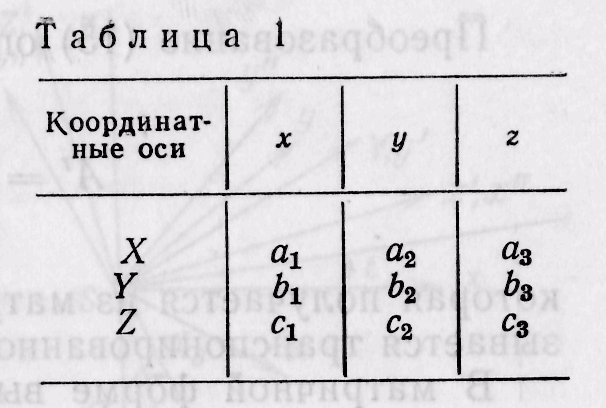
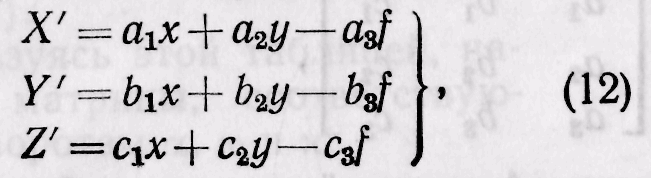
где а1, а2, а3 — косинусы углов, составленных осью X с осями х, у, z (табл. 1); b1, b2, b3 — косинусы углов, составленных осью Y с осями х, у, z; c1, с2, с3 — косинусы углов, составленных осью Z с осями х, у, z; f = So — фокусное расстояние фотокамеры.
Косинусы, входящие в формулы преобразования координат, называются направляющими косинусами. Они связаны между собой шестью независимыми уравнениями

Отсюда следует, что из девяти косинусов независимы только три, т. е. девять косинусов зависят от трех параметров.
Если координаты главной точки снимка не равны нулю, то формулы (12) имеют такой вид:
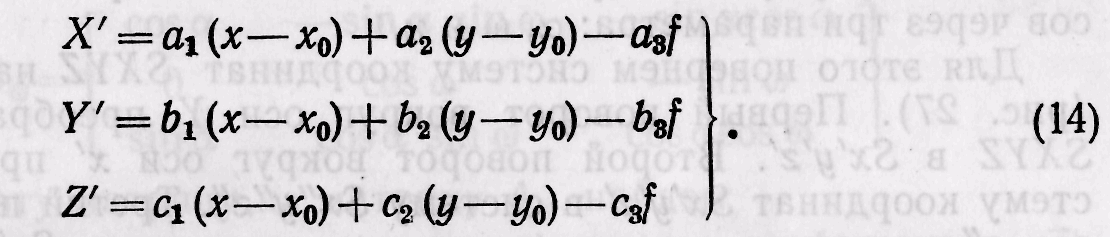
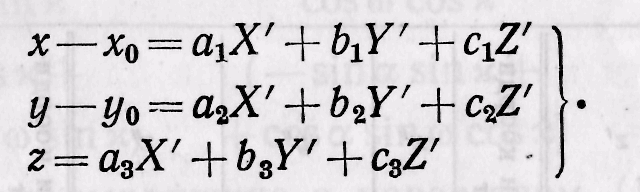
Формулы (14) позволяют перейти от плоских координат точки снимка к пространственным. Формулы обратного перехода можно представить так:
Преобразование координат (14) определяет квадратная матрица, составленная из направляющих косинусов
и называемая матрицей третьего порядка или матрицей преобразования координат.
Преобразование (15) определяется матрицей

которая получается из матрицы А заменой строк столбцами и называется транспонированной.
В матричной форме выражения (14) и (15) можно представить так

Три параметра, от которых зависят направляющие косинусы, составляют угловые элементы внешнего ориентирования снимка:
![]()