

§47. Взаимное ориентирование пары снимков
Величины, определяющие взаимное положение пары снимков во время фотографирования, называются элементами взаимного ориентирования.
Взаимное ориентирование пары снимков можно выполнить двумя способами:
поворотами обоих снимков;
поворотами и смещениями только одного снимка, например правого при неподвижном положении левого.
В соответствии с этим различают две системы элементов взаимного ориентирования. В первой системе неподвижным считают базис фотографирования, во второй — левый снимок.
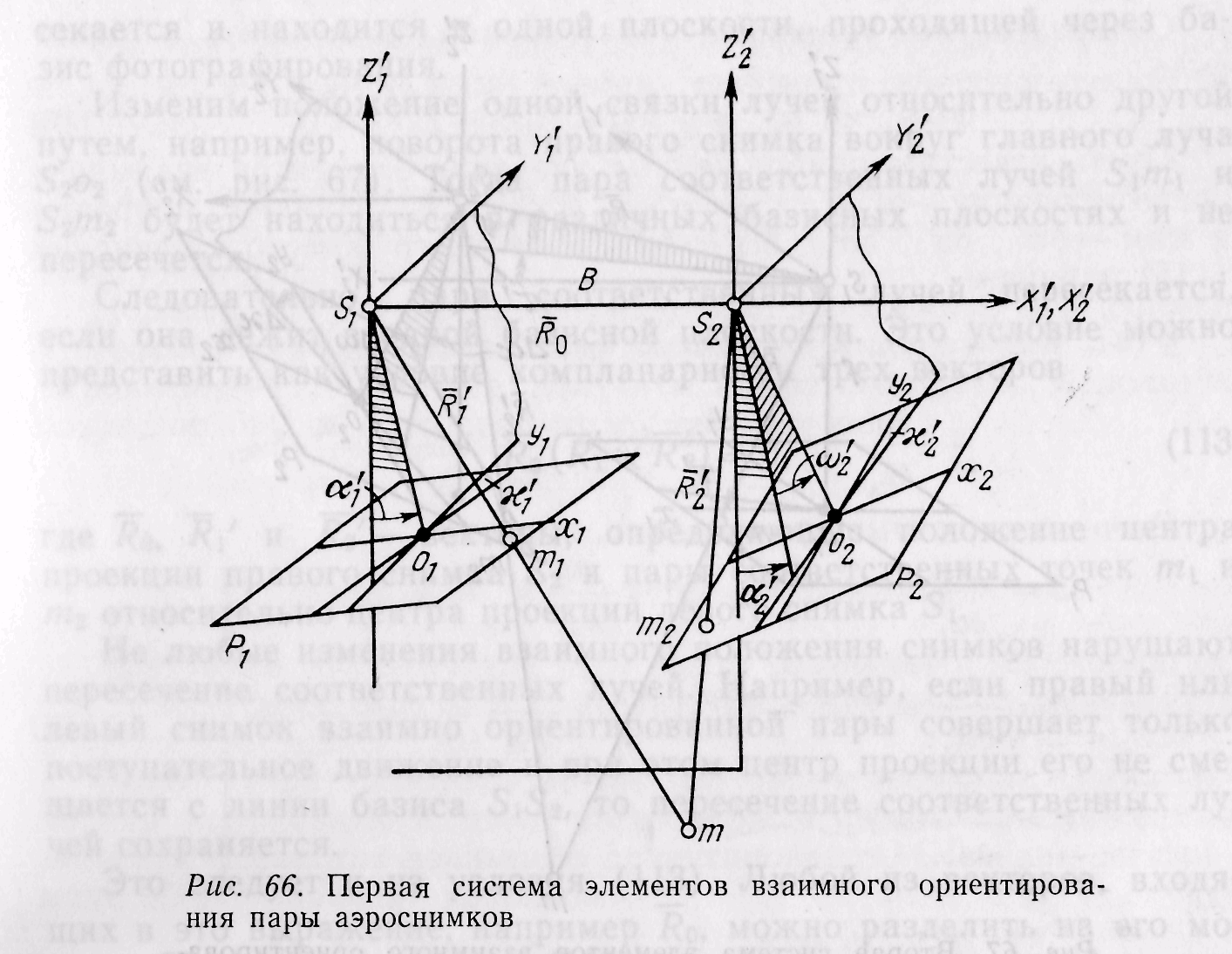
Первая система (рис. 66). Элементами взаимного ориентирования в этой системе служат:
α´1 — угол в главной базисной плоскости S1O1S2 левого снимка между главным лучом левой связки SlOl и перпендикуляром к базису;
´1—угол на левом снимке между осью у1 и следом плоскости SlOlY1';
α´2 —угол в главной базисной плоскости левого снимка между перпендикуляром к базису и проекцией главного луча правой
СВЯЗКИ S 2O2',
ω2' — угол между проекцией главного луча правой связки на базисную плоскость левого снимка и главным лучом S2O2;
´2 — угол на правом снимке между осью у2 и следом плоскости S2o2Y2'.
Углы α´1 и α´2 называются продольными углами наклона снимков относительно базиса фотографирования, ω2' — взаимным поперечным углом наклона, а углы ´1 и ´2 — углами поворота.
Началом пространственных координат в первой системе служит центр проекции левого снимка, ось Х´1 совмещена с базисом, а ось Z´1 находится в главной базисной плоскости левого снимка. Система координат S2X´2Y´2Z2' параллельна системе координат S1 X´1 Y´1 Z1'.
Зная элементы взаимного ориентирования снимков, можно найти фотограмметрические координаты любой точки модели.
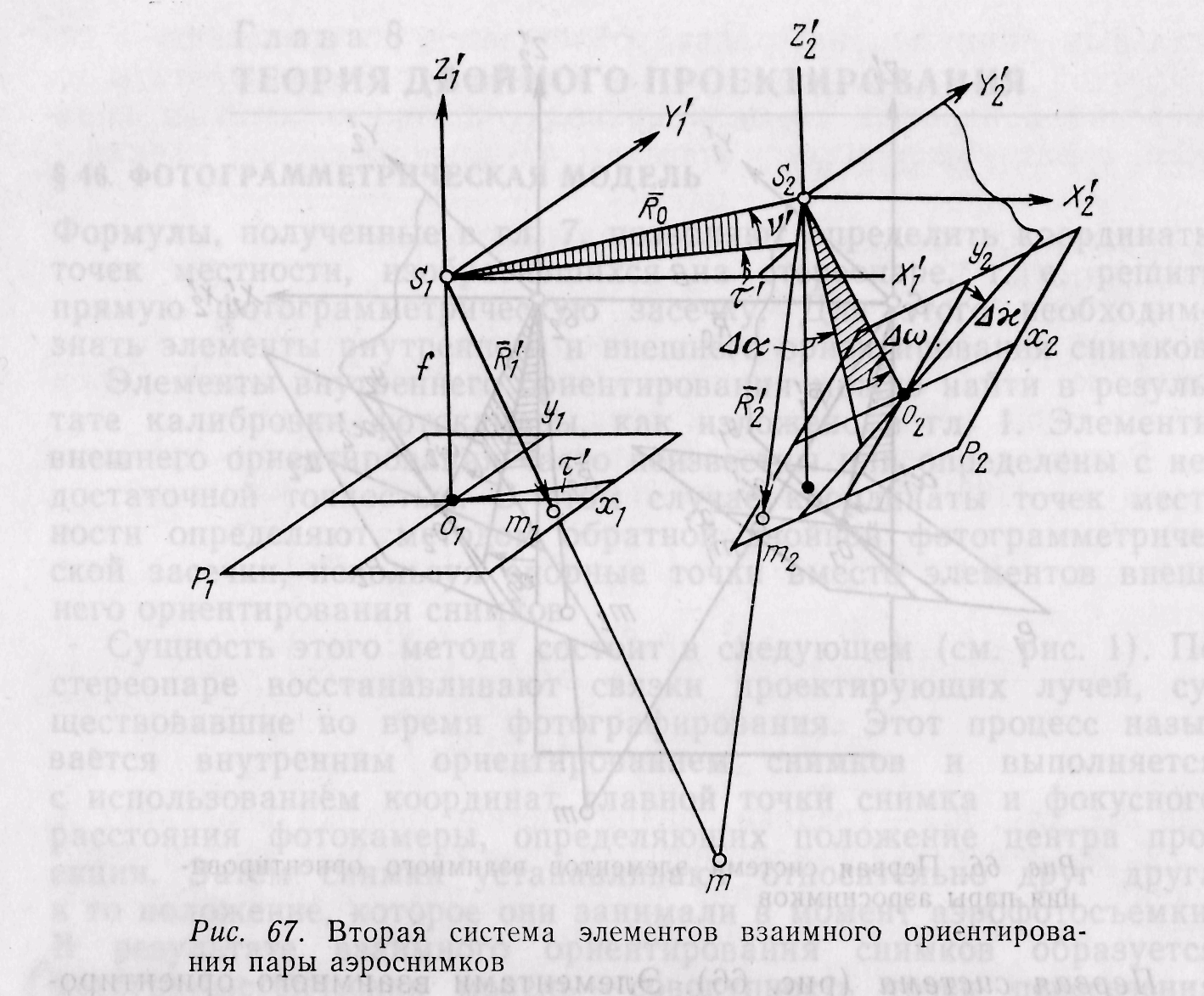
Вторая система (рис. 67). Началом фотограмметрических координат служит тоже центр проекции левого снимка, но координатные оси X´1 и Y´1 направлены параллельно соответствующим осям х 1 и у1 левого снимка. Ось Z1' совмещена с главным лучом левой связки. Система координат S2X´2Y´2Z2' параллельна системе координат S1 X´1 Y´1 Z1'.
В качестве элементов взаимного ориентирования используются следующие величины:
![]() —
угол на левом
снимке между осью х
1
и
следом главной базисной плоскости этого
снимка;
—
угол на левом
снимке между осью х
1
и
следом главной базисной плоскости этого
снимка;
ν' — угол наклона базиса относительно левого снимка;
Δα — взаимный продольный угол наклона снимков, составлен осью Z2' с проекцией главного луча правой связки на плоскость X´2 Z2';
Δω — взаимный поперечный угол наклона снимков, заключенный между плоскостью X´2 Z2' и главным лучом правой связки;
Δ — взаимный угол поворота снимков, угол на правом снимке между осью у2 и следом плоскости S2o2Y2'.
Условие пересечения пары соответственных лучей. На рис. 66 и 67 представлены взаимно ориентированные снимки, точка модели m и ее изображения на стереопаре m1 и m2. В этом случае любая пара соответственных лучей, например S1 m1 и S2 m2, пересекается и находится в одной плоскости, проходящей через базис фотографирования.
Изменим положение одной связки лучей относительно другой путем, например, поворота правого снимка вокруг главного луча S2o2 (см. рис. 67). Тогда пара соответственных лучей S1 m1 и S2 m2 будет находиться в различных базисных плоскостях и не пересечется.
Следовательно, пара соответственных лучей пересекается, если она лежит в одной базисной плоскости. Это условие можно представить как условие компланарности трех векторов

где
![]() —
векторы, определяющие положение центра
проекции правого снимка S2
и
пары соответственных точек m1
и
т2
относительно
центра проекции левого снимка S1.
—
векторы, определяющие положение центра
проекции правого снимка S2
и
пары соответственных точек m1
и
т2
относительно
центра проекции левого снимка S1.
Не любые изменения взаимного положения снимков нарушают пересечение соответственных лучей. Например, если правый или левый снимок взаимно ориентированной пары совершает только поступательное движение и при этом центр проекции его не смещается с линии базиса S1S2, то пересечение соответственных лучей сохраняется.
Это
следует и из условия (113). Любой из
векторов, входящих в это выражение,
например![]() ,
можно разделить на его модуль. Поэтому
уравнение (113) связывает между собой
только направления векторов или
направления соответственных лучей и
базиса. Длина базиса в этом случае не
имеет значения и может быть произвольной.
,
можно разделить на его модуль. Поэтому
уравнение (113) связывает между собой
только направления векторов или
направления соответственных лучей и
базиса. Длина базиса в этом случае не
имеет значения и может быть произвольной.
Уравнения взаимного ориентирования. Составим уравнения, связывающие элементы взаимного ориентирования снимков с координатами соответственных точек стереопары.
Напишем условие (113) применительно к первой системе элементов взаимного ориентирования (см. рис. 66):
Здесь X´1, Y´1, Z1'— координаты точки m1 в системе S1 X´1 Y´1 Z1'; S2X´2Y´2Z2' — координаты точки т2 в системе S2X´2Y´2Z2' параллельной системе S1 X´1 Y´1 Z1'. Эти координаты вычисляют по формулам (14) и (20) с заменой α, ω и на α´1 , ω1' = 0, ´1 для левого снимка и α´2, ω2', ´2 для правого снимка.
Следовательно, уравнение (114) можно представить в таком виде:
![]()
Пусть известны приближенные значения элементов взаимного ориентирования
![]() Найдем
поправки к ним
Найдем
поправки к ним
![]() Для этого вместо
уравнения (115) напишем
Для этого вместо
уравнения (115) напишем

Вычислив частные производные, получим
Полагая, что имеются избыточные измерения, представим уравнение взаимного ориентирования так:

Одна точка стереопары позволяет составить одно уравнение (118) с пятью неизвестными. Следовательно, для определения элементов взаимного ориентирования необходимо выбрать на стереопаре не менее пяти точек, измерить их координаты на левом и правом снимках, составить систему уравнений (118) и решить ее.
Уравнение (118) пригодно для снимков, имеющих любые значения элементов ориентирования. В случае плановой аэросъемки, когда угловые элементы внешнего ориентирования малы, это уравнение можно упростить и привести к виду
![]()
где q=yl—y2 — поперечный параллакс.
Из этого уравнения следует, что на стереопаре нет поперечных параллаксов, если каждый элемент взаимного ориентирования равен нулю:
![]()
Такой случай съемки называют нормальным. Он характеризуется тем, что снимки находятся в одной плоскости, параллельной базису фотографирования.
Нормальный случай съемки называют идеальным, если снимки и базис фотографирования горизонтальны (см. рис. 65). (Уравнение (120) можно получить и другим путем. Используя равенство (44) и учитывая, что ω1/=0, напишем
Подставим эти значения у1° и у20 в равенство (121), полагая, что в коэффициентах перед неизвестными у1 = у2. В результате получим уравнение (120).
Определение элементов взаимного ориентирования. Пусть измерены координаты п точек стереопары и даны приближенные значения элементов взаимного ориентирования. Составим по формуле (118) уравнения поправок
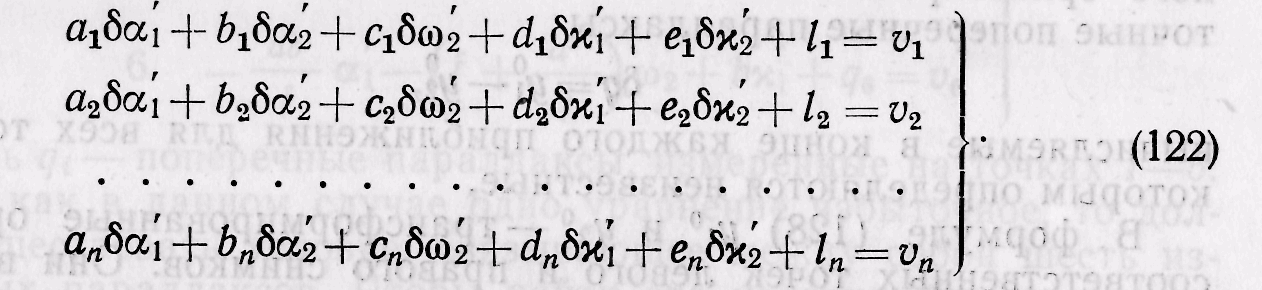
Представим эти уравнения в матричной форме
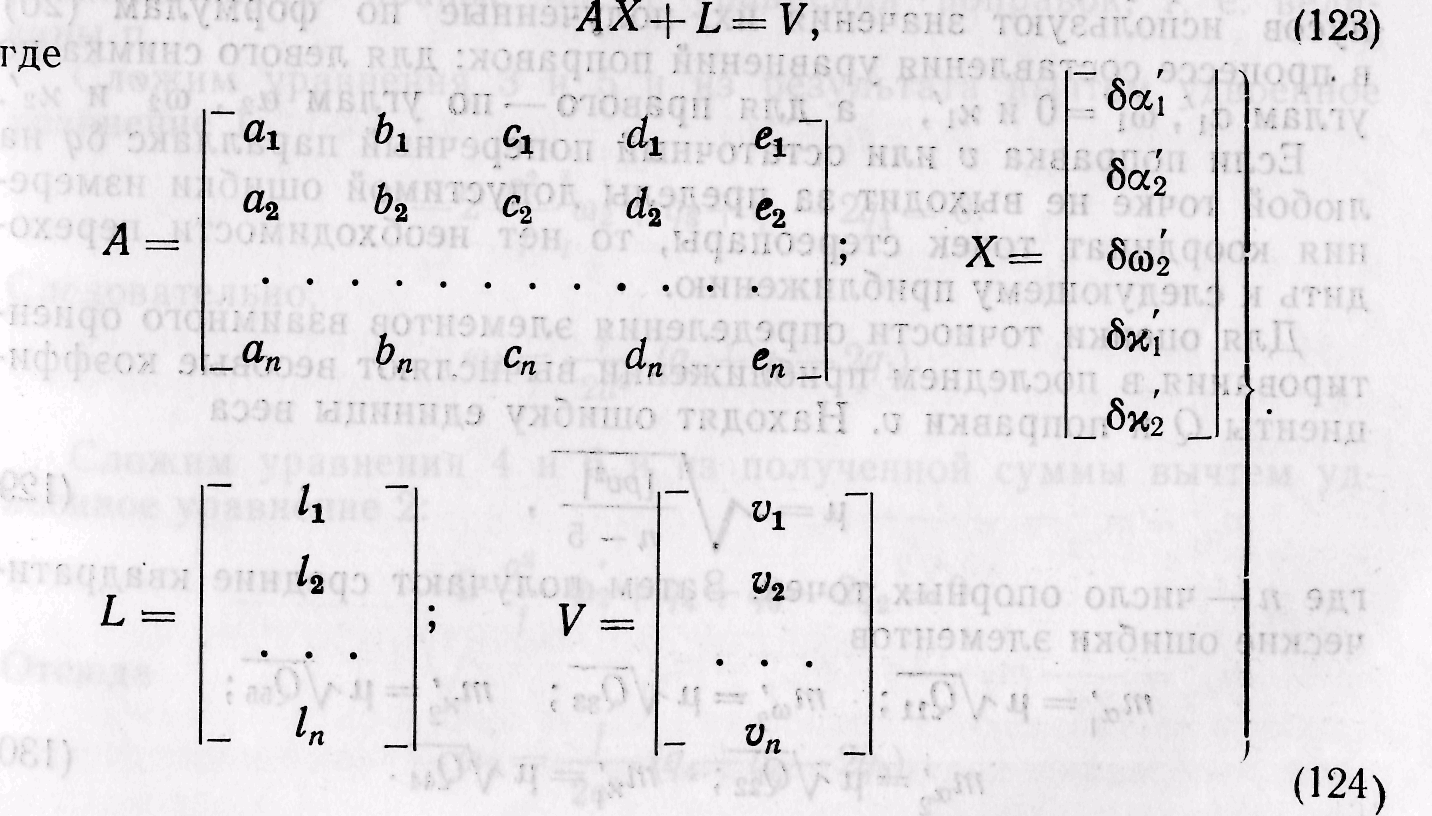
Затем составим систему нормальных уравнений пятого порядка
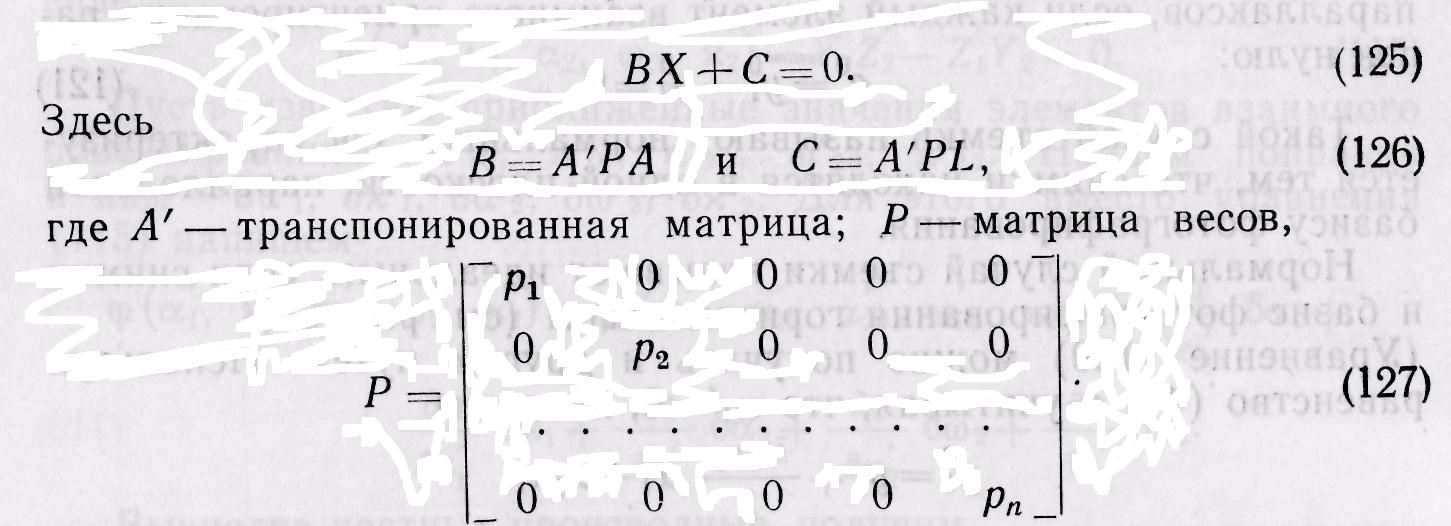
Решив нормальные уравнения, получим поправки к начальному приближению неизвестных и после введения их найдем первое приближение элементов взаимного ориентирования.
Используя уточненные значения определяемых величин, вновь составим уравнения поправок и нормальные уравнения. Решив их, получим поправки к первому приближению и найдем второе приближение. Так следует действовать до тех пор, пока поправки не будут настолько малы, что ими можно пренебречь.
В качестве критерия точности определения элементов взаимного ориентирования можно использовать поправки v или остаточные поперечные параллаксы
![]()
вычисляемые в конце каждого приближения для всех точек, по которым определяются неизвестные.
В формуле (128) у1° и у20 — трансформированные ординаты соответственных точек левого и правого снимков. Они вычисляются по формуле (43). При этом в качестве направляющих косинусов используют значения их, полученные по формулам (20) в процессе составления уравнений поправок: для левого снимка по углам α1´, ω1' = 0 и ´1, а для правого — по углам α2´, ω2' = 0 и ´2
Если поправка v или остаточный поперечный параллакс δq на любой точке не выходит за пределы допустимой ошибки измерения координат точек стереопары, то нет необходимости переходить к следующему приближению.
Для оценки точности определения элементов взаимного ориентирования в последнем приближении вычисляют весовые коэффициенты Q и поправки ν. Находят ошибку единицы веса

где n —число опорных точек. Затем получают средние квадратические ошибки элементов

Рис. 68. Стандартное расположение точек на стереопаре для определения элементов взаимного ориентирования
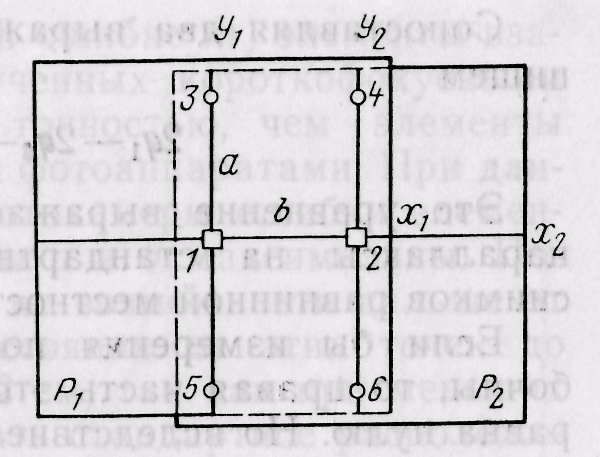
Если снимки плановые, а количество и расположение точек на стереопаре стандартные (рис. 68), то можно получить простые формулы для определения элементов взаимного ориентирования по поперечным параллаксам. С этой целью составим уравнения поправок (120) для точек 1— 6:
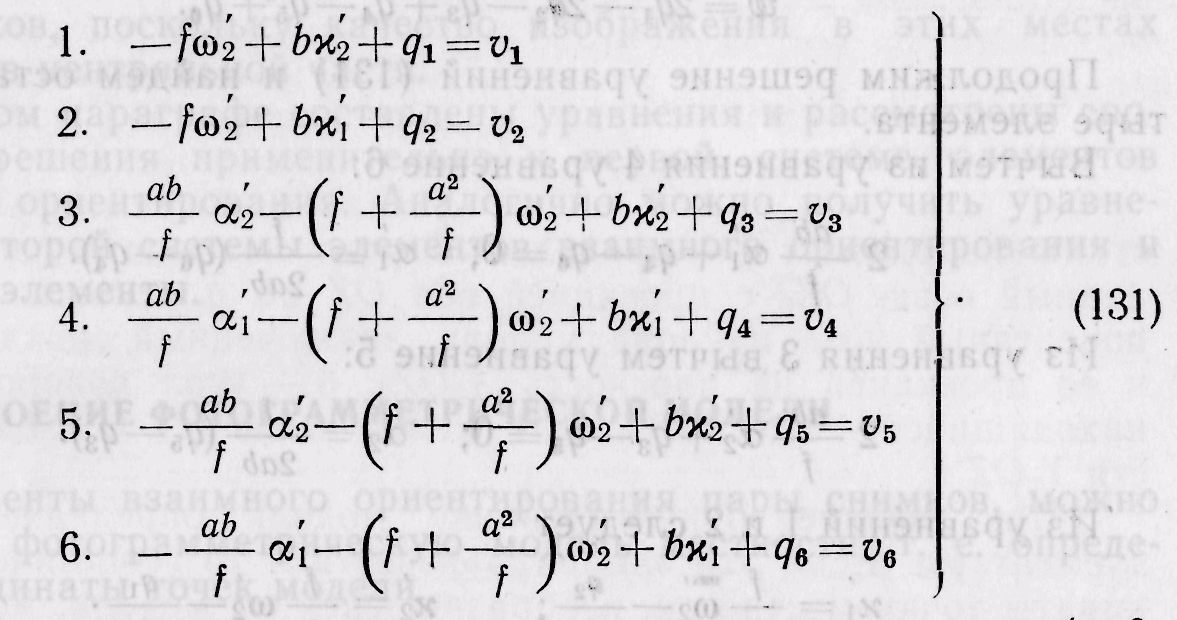
Здесь qi — поперечные параллаксы, измеренные на точках 1—6.
Так как в данном случае одно уравнение избыточное, то должно существовать условие, связывающее между собой шесть измеренных параллаксов. Чтобы найти это условие, будем считать равными нулю правые части уравнений поправок, т. е. величины v.
Сложим уравнения 3 и 5 и из результата вычтем удвоенное уравнение 1:
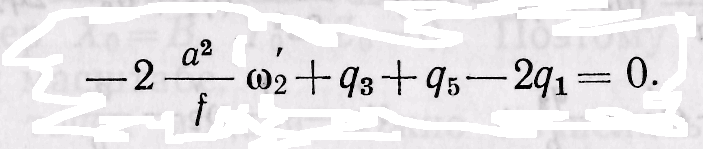 Следовательно,
Следовательно,

Сложим уравнения 4 и 6 и из полученной суммы вычтем удвоенное уравнение 2:
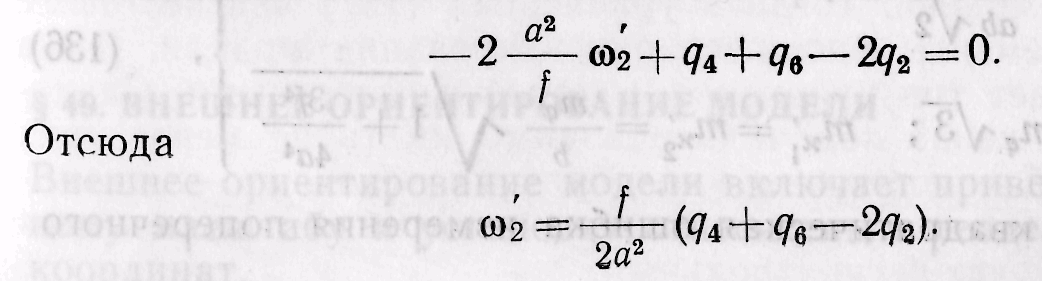
Сопоставляя два выражения, определяющие элемент ω2', напишем
![]()
Это уравнение выражает условие, связывающее поперечные параллаксы на стандартно расположенных точках плановых снимков равнинной местности.
Если бы измерения поперечных параллаксов были безошибочны, то правая часть этого уравнения действительно была бы равна нулю. Но вследствие ошибок измерений в правой части будет не нуль, а невязка
![]()
Продолжим решение уравнений (131) и найдем остальные четыре элемента.
Вычтем из уравнения 4 уравнение 6:

Из уравнения 3 вычтем уравнение 5:

Из уравнений 1 и 2 следует
![]()
Итак, в результате решения уравнений получаем следующие формулы для определения элементов взаимного ориентирования:
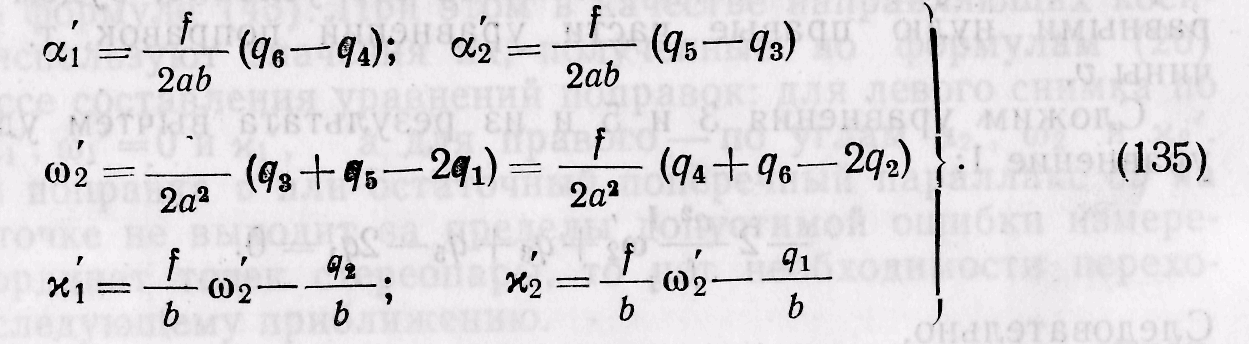
Используем эти формулы для подсчета средних квадратических ошибок определения элементов взаимного ориентирования. Получим
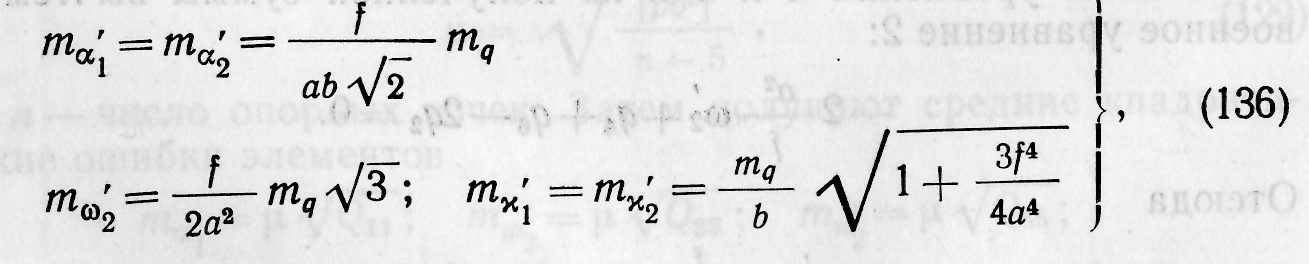
где тq _средняя квадратическая ошибка измерения поперечного параллакса.
Отсюда следует, что при одинаковой ошибке mq элементы взаимного ориентирования снимков, полученных короткофокусными фотокамерами, находятся с большей точностью, чем элементы снимков, полученных длиннофокусными фотоаппаратами. При данном значении фокусного расстояния фотокамеры ошибки элементов будут минимальны, когда величины а и b максимальны. Поэтому точки 3, 4, 5 и 6 надо выбирать по возможности дальше от начального направления. Однако расстояния от этих точек до краев снимка должны быть не менее 2 см, так как при меньших расстояниях не всегда можно выдержать стандартное расположение точек вследствие углов поворота снимков. Кроме того, по мере приближения к краям снимков снижается точность измерения снимков, поскольку качество изображения в этих местах хуже, чем в центральной части.
В данном параграфе составлены уравнения и рассмотрены способы их решения применительно к первой системе элементов взаимного ориентирования. Аналогично можно получить уравнения для второй системы элементов взаимного ориентирования и найти эти элементы.