

§ 72. Основные формулы для пары
НАЗЕМНЫХ СНИМКОВ
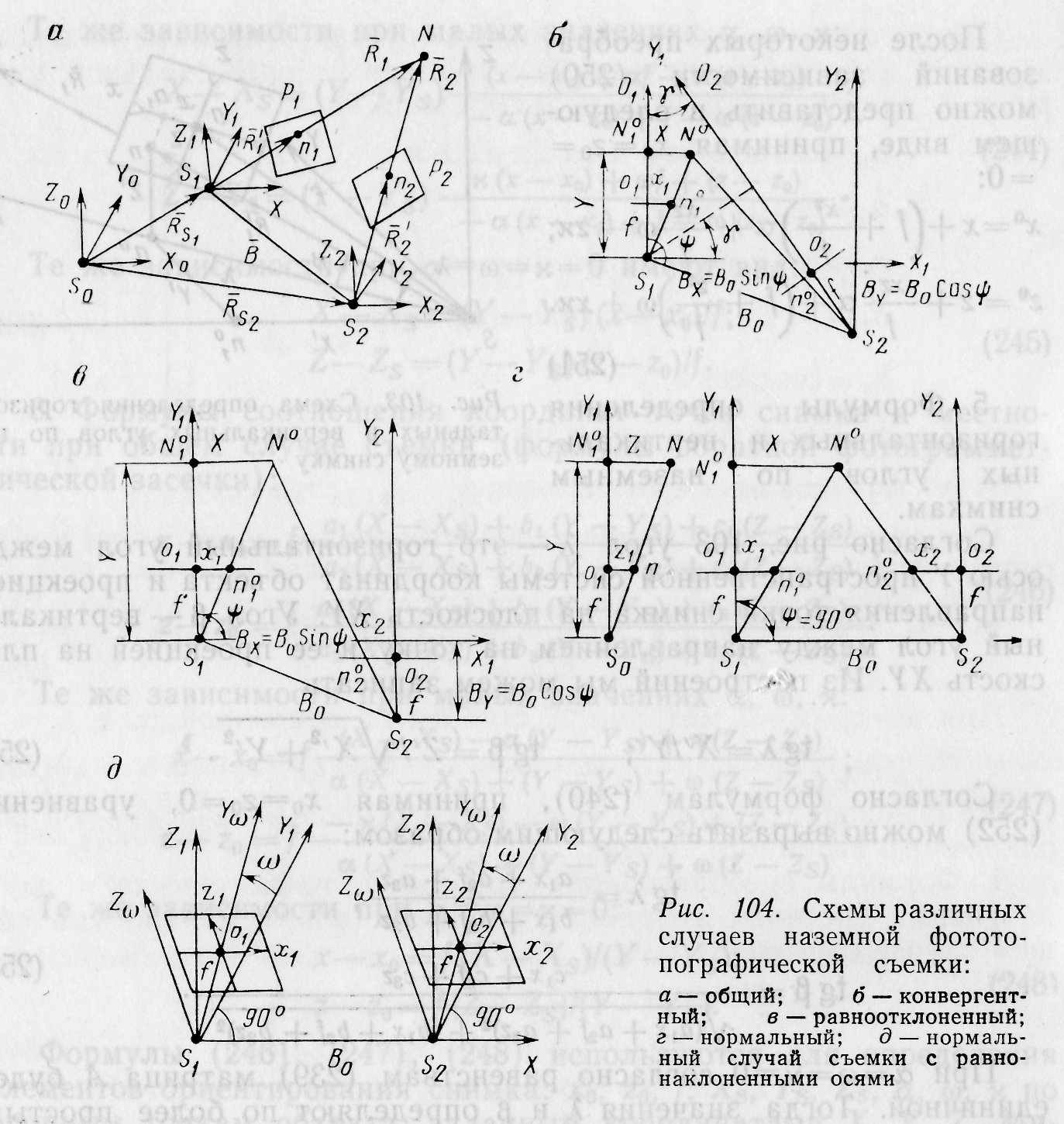
Общий случай съемки (рис. 104,а). Формулы для общего случая Съемки можно получить на основании формул, приведенных в гл. 7, используя для этого преобразования (231) и (236).
Однако
выведем эти формулы, исходя из
геометрических построений, показанных
на рис. 104, а.
Из
условий коллинеарности векторов
![]() а
также векторов
а
также векторов
![]() следует, что
следует, что
где N1 и N2 — скалярные множители.
Из условия компланарности векторов следует
![]()
Учитывая значения (256) и (257), получим
![]()
В координатной форме выражение (259) будет иметь вид
Уравнение (260) объединяет в себе три уравнения вида

где Х´1, Y´1, Z´1 , X´2, Y´2, Z´2 —пространственные координаты точек снимков, определяемые по формулам (240). Решая совместно уравнения (261), получим
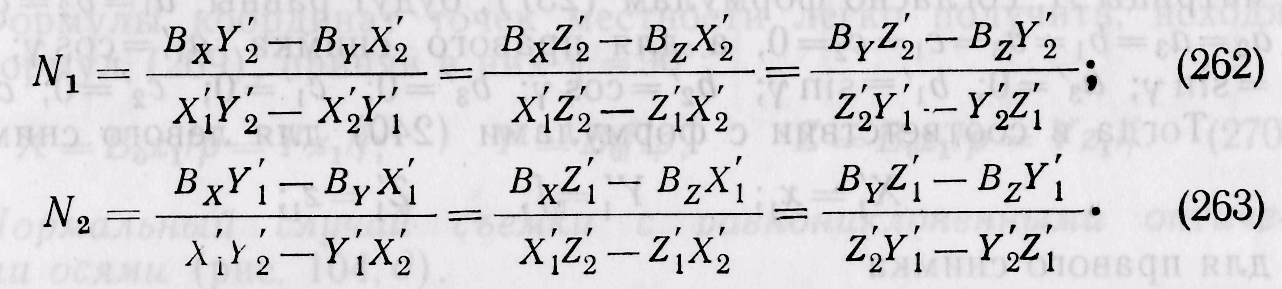
Так как при фототопографической съемке базис фотографирования направлен приблизительно вдоль оси X, то для определения N1 и N2 следует пользоваться первыми значениями уравнений (262) и (263).
Итак, для определения пространственных координат точек объекта в фотограмметрической системе при общем случае съемки необходимо: произвести измерение плоских координат определяемых точек на паре снимков; вычислить по известным значениям элементов ориентирования снимков (α, ω, ) направляющие косинусы по формулам (237); определить по формулам (240) пространственные координаты точек изображения на снимках; вычислить по формулам (262) и (263) скалярные множители, а по формуле (256) — пространственные координаты определяемых точек.
Формулы общего случая съемки имеют чисто теоретическое значение и для решения практических задач, например фототопографических, не используются. Для этих целей применяют простые случаи съемки, предусматривающие установку значений ω и снимков стереопар, близких к нулю. При этом используют несколько другую систему элементов ориентирования снимков, исключающую определение геодезических координат правого конца съемочного базиса.
К ним
относятся: ХГ.
Sl,
УГ.Sl,
ZГ.Sl-—геодезические
координаты левого конца съемочного
базиса; Во
—
горизонтальное проложение базиса; h
—
превышение концов базиса; αВ
— дирекционный угол базиса; ψ—
угол отклонения левой оптической оси
снимка от базиса; γ—
угол конвергенции оптических осей
снимков стерео пары;
![]() —
угол наклона левой оптической оси; ω1
—
угол крена левого снимка; ω2
— угол наклона правой оптической оси;
—
угол наклона левой оптической оси; ω1
—
угол крена левого снимка; ω2
— угол наклона правой оптической оси;
![]() —
угол крена правого снимка.
—
угол крена правого снимка.
Наиболее широкое применение получили три случая съемки с горизонтально расположенными оптическими осями и оси хх снимков: конвергентный случай (γ <3°), равноотклоненный и нормальный случаи съемки.
Конвергентный случай съемки (рис. 104,6) задается следующими элементами ориентирования снимков, составляющих стереопару: f1=f2 = f; xо=z0 = 0; S1(0, 0, 0); SO(BX, BY, Bz); ψ 90°;
α1=ω1= =0; γ=—α2; ω2= .
На основе построений, показанных на рис. 104,6, можно записать, что Bx = Bosinψ, By = B0cosψ;
Bz = 0. В соответствии с угловыми элементами левого снимка значения коэффициентов матрицы А, согласно формулам (237), будут равны: а1= b2 = с3=1; a2 = a3 = bl = b3 = c1 = c2 = 0, а для правого снимка a1´ = cosγ; a2' = sinγ; a3' = 0; b1 ´=siny; b2' = cosy; b3´ = 0; c1' = 0; с2' = 0; c3'=1. Тогда в соответствии с формулами (240) для левого снимка
![]()
для правого снимка
![]()
Далее в соответствии с формулой (262) находим

После некоторых тригонометрических преобразований получим

Пространственные координаты определяемых точек согласно формуле (256)
![]()
Подставляя в формулу (267) значения (264) и (265), получим
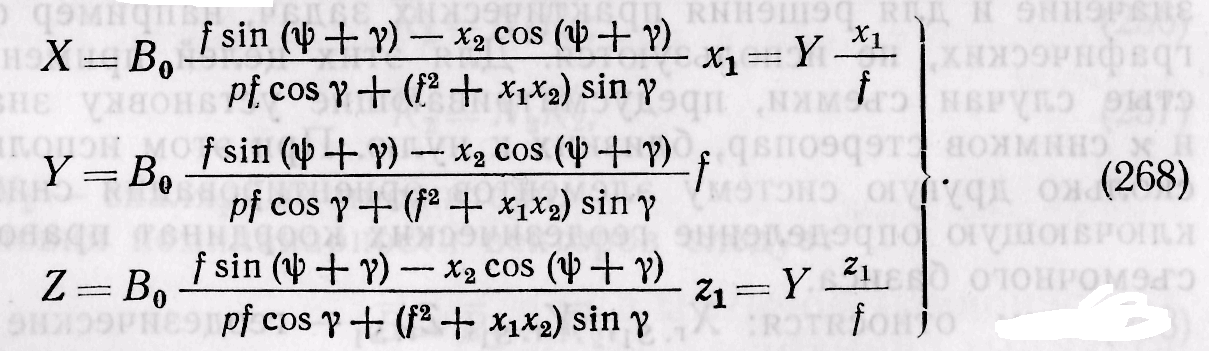
Случай съемки с равноотклоненными оптическими осями (равноотклоненныи случай) (рис. 104,в). Элементы ориентирования заданы величинами : f1=f2 = f; xо=z0 = 0; S1(0, 0, 0); S2 (BX, BY, Bz);
ψ 90°; α1=ω1= =0; γ=0; ω2= =0. Формулы соотношения координат получим, исходя из выражений (268), приняв

Нормальный случай съемки (рис. 104,г). Элементы ориентирования имеют следующие значения:
f1=f2 = f; xо=z0 = 0; S1(0, 0, 0); S2 (BX, BY, Bz); ψ= 90°; α1=ω1= =0; γ=0; ω2= =0.
Формулы координат точек местности легко получить, исходя из формул (269), приняв в них
ψ = 90°:
![]()
Нормальный случай съемки с равнонаклоненными оптическими осями (рис. 104, д).
Этот случай съемки для топографических целей может быть использован в тех случаях, когда в наличии имеются приборы, позволяющие решить поставленную задачу. Такими приборами являются стереопланиграф и топокарт Народного предприятия «Карл Цейс Иена» (ГДР). Геометрический смысл этого случая показан на рис. 104,5. Элементами ориентирования являются
f1=f2 = f; xо=z0 = 0; S1(0, 0, 0); S2 (B0, 0, 0); ψ= 90°; α1=ω1= =0; γ=0; ω2= =0, ω1=ω2=ω. Используя формулы (270), найдем пространственные координаты точек местности в наклонной плоскости, т. е. Хω, Уω, Zω. Для перехода к горизонтальной плоскости воспользуемся зависимостью в матричном виде
R = AωRω,
где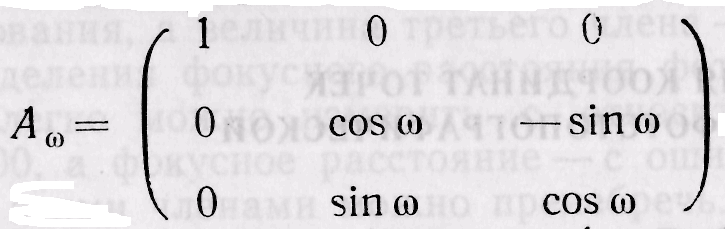 —матрица
преобразования координат при повороте
на угол ω.
—матрица
преобразования координат при повороте
на угол ω.
После умножения матриц Аω на Rω получим искомые формулы соотношения координат
![]()