§ 56 Стереограф ф. В. Дробышева
Стереограф проф. Ф. В. Дробышева, основная модель которого СД-3 приведена на рис. 78,— стереофотограмметрический прибор, предназначенный для создания топографических карт по аэрофотоснимкам. Пространственная засечка строится механическим путем согласно теории обработки снимков с преобразованием связок проектирующих лучей. Конструктивная форма засечки — треугольник плюс параллелограмм. Так как снимки на приборе расположены вдоль оси У, то параллелограмм также ориентирован примерно вдоль этой оси. Влияние углов наклона снимков учитывается с помощью коррекционных плоскостей, которые вводят поправки в координаты точек снимков путем изменения фокусных расстояний проектирующих камер.
Прибор состоит из собственно стереографа 1 и координатографа 6, установленных на общем столе. Запасные принадлежности находятся в тумбочке 8, в верхней части которой располагается световой пульт 7, используемый для центрирования снимков в снимкодержателях.
Управление работой прибора наблюдатель выполняет с помощью трех штурвалов: двух ручных и ножного. Левый ручной штурвал 12 служит для перемещения измерительной марки в пространстве модели вдоль оси X, а правый ручной штурвал 10 — вдоль оси Y. Ножной штурвал 11 служит для стереоскопического наведения измерительной марки на точки модели с целью измерения координат Z. Ножная педаль 9 включает соленоид на координатографе, и в результате происходит опускание карандаша или резца, вставленного в соленоид, на основу создаваемой карты.
Стереоскопическое наблюдение пары снимков, установленных в снимкодержатели 4, производится через окуляры 2, имеющие увеличение 7х. Установка глазного базиса осуществляется смещением правого окуляра относительно левого винтом 3. Снимок с опорными точками крепится на подставке 14.
Принцип работы коррекционного механизма стереографа следующий. Предположим, что из центра проекции S (рис. 79) получен снимок Р с фокусным расстоянием f и углом наклона α0. Используя принцип обратимости фотографического процесса, произведем трансформирование снимка Р с сохранением элементов внутреннего ориентирования. Центральным проектированием из точки S точку снимка (точка т) перенесем на горизонтальную плоскость Pt (точка mt), которая отстоит от центра проекции S на расстоянии ft= f + δf, называемом фокусным расстоянием трансформированного изображения.
Теперь выполним трансформирование снимка Р с преобразованием связки проектирующих лучей. Для этого новый центр проекции S' расположим на отвесном луче Sn. Расстояние от точки S' до горизонтальной плоскости, проведенной через линию неискаженных масштабов аэрофотоснимка Р (точка с), будет исходным фокусным расстоянием F проектирующей камеры. В ходе трансформирования необходимо получить на плоскости Pt такое же трансформированное изображение, как и при проектировании с подобной связкой. Введем дополнительную плоскость Рк. Чтобы три плоскости Р, Рк и Pt находились в перспективном соответствии, плоскость Рk должна проходить через преобразованную линию горизонта (точка Ik) и линию пересечения плоскостей Р и Pt (точка V). Угол наклона плоскости Рк обозначим αk. Точки снимка Р перенесем на плоскость Рk пучком лучей, параллельным линии SS', например, лучи mmk, IIk. С плоскости Рk центральным проектированием из центра S' перенесем точки (точка mk ) на плоскость Pt. В результате получим трансформированное изображение, аналогичное полученному при подобной связке, фокусное расстояние которого относительно центра проекции S' будет Ft= F+δf
Плоскость Pk называется коррекционной плоскостью. Ее поворот вокруг преобразованной линии горизонта — изменение угла αk — вызывает смещение по высоте плоскости Pt и тем самым изменение фокусного расстояния трансформированного изображения. Следовательно, данный способ трансформирования снимков вводит поправки за перспективу с масштабным коэффициентом


Связь между углами наклона аэроснимка ао и коррекционной плоскости а k определяется зависимостью

где![]() —
коэффициент преобразования связки
проектирующих лучей.
—
коэффициент преобразования связки
проектирующих лучей.
Теория стереографа основана на условии, что плоскости Pk и Pt проходят через линию неискаженных масштабов, т. е. kt =1, ft = f, Ft = F. В этом случае условия строгой работы коррекцион-ного механизма прибора будут следующими:
1) аэроснимок должен быть наклонен на угол αо, который он имел в момент экспонирования;
2) коррекционная плоскость должна быть наклонена вокруг линии неискаженных масштабов аэроснимка на угол

3) вертикальное перемещение каретки перемены фокусного расстояния ΔF, опирающейся на коррекционную плоскость, должно быть параллельно линии, на которой расположены центры проекции S и S'.
Однако на приборе указанные условия не соблюдаются. Во-первых, снимки расположены горизонтально, что приводит к ошибкам при измерении координат, равным разности отрезков ст = r и r', т. е. δr = r— r '= r —rcos αо или, учитывая малость угла αо, δr =0,5 r αо 2
Во-вторых, коррекционная плоскость не пересекает снимок по линии неискаженных масштабов из-за того, что центр вращения плоскости (точка оk.) расположен ниже ее рабочей поверхности на величину l. С учетом того, что фокусное расстояние трансформированного изображения зависит от угла наклона снимка, при обработке пары снимков с разными углами наклона возникает неравенство Ftл и Ftп
Наличие
указанных отклонений приводит к
дополнительным наклонам модели,
разномасштабности по осям X
и
У, искажению базисной составляющей bz-
Чтобы
эти искажения были практически малы,
на стереографе следует обрабатывать
гиростабилизированные аэроснимки,
имеющие углы наклона αо![]() 1°.
1°.
Из-за горизонтального расположения снимков возникает необходимость вводить децентрации, чтобы обеспечить установку точки надира снимка на отвесном луче:
![]()
где dα, dω—отсчеты в миллиметрах со шкал винтов а и со с учетом места нуля.
Кинематическая схема стереографа приведена на рис. 80. На станине, прикрепленной к столу координатографа, установлены направляющие, по которым перемещается каретка У. На ней находятся направляющие, по которым перемещается каретка X. Каретки X и У приводятся в движение с помощью ручных штурвалов.
Рис. 80. Кинематический схема стереографа

Рис.
81. Схема
наблюдательной системы стереографа:
ход оптического луча в левой (а)
и
правой (б)
ветвях
наблюдательной системы; в
—
вид сверху на положение оптических
элементов правой ветви

На каретке X вертикально установлены направляющие, по которым с помощью ножного штурвала перемещается каретка Z. Вращая штурвалы X, У и Z, можно перемещать каретку Z вдоль трех координатных осей прибора.
На каретке X имеются горизонтальные направляющие дифференциальных кареток хл и хп, а на последних — горизонтальные направляющие дифференциальных кареток ул и уп, на которых установлены снимкодержатели Рл, Рп и вертикальные направляющие кареток изменения фокусного расстояния ΔFЛ, ΔFn. Последние шаровыми опорами скользят по стеклянным коррекционным плоскостям Ркл и Ркп, которые смонтированы на станине и могут наклоняться с помощью микрометренных винтов 13 (см. рис. 78), установленных в передней части станины. На каретках ΔFЛ, ΔFn установлены нижние шарниры тл, тп, точки пересечения осей которых соответствуют точкам на снимках, на которые наведены марки. Верхние шарниры 5Л и S,,, точки пересечения осей которых представляют собой центры проекции, прикреплены к станине рядом с наблюдательной системой. Через шарниры Sл, Sп, тл и тп проходят проектирующие стержни ^л и Rn, определяющие направления пары одноименных проектирующих лучей.
При вращении штурвалов X, Y и Z шаровые опоры кареток А/^л и AFn скользят по коррекционным плоскостям, и при их наклонном положении происходит вертикальное смещение кареток. Одновременно с ними смещаются нижние шарниры тл, тп, которые скользят вдоль проектирующих стержней, что при наклоне последних приводит к смещению в горизонтальной плоскости дифференциальных кареток, несущих снимкодержатели. Эти смещения соответствуют величинам поправок за углы наклона аэроснимков в координаты наблюдаемой точки.
На каретке Z имеются три суппорта, позволяющие устанавливать на приборе базис проектирования, проекция которого на ось X устанавливается смещением нижнего конца проектирующего стержня Ял на величину Ьх, а проекции на оси Y и Z — смещением нижнего конца стержня Rn на величины by и bz. Для этого на суппортах Ьх и bz установлены шаровые опоры Мл и М„ проектирующих стержней, центральные точки которых определяют положение точки модели в координатной системе прибора.
Снимкодержатели имеют повороты на угол к и движения для введения децентраций Ах (на рисунке не показаны).
Наблюдательная система предназначена для стереоскопического рассматривания пары снимков и наведения измерительных марок на точки, а также для установки поперечных децентраций. На рис. 81, а и б показан ход оптического луча в левой и правой ветвях наблюдательной системы, которые несколько отличаются друг от друга. Лучи с изображением точек снимка Р попадают в призму 1, которая направляет их в объектив 2. Снимок расположен в фокальной плоскости объектива 2, поэтому оптические лучи выходят из него параллельным пучком, проходят оптическую систему 3 и попадают в объектив 4, в фокальной плоскости которого расположена стеклянная пластинка 6 с награвированной измерительной маркой. Совместное изображение точек снимка и марки рассматривается через окуляр 7, перед которым установлен оптический клин 8.
Оптические элементы 3'"—8 (рис. 81,в) правой ветви закреплены на суппорте установки глазного базиса br. Так как призмы 3', 3" и 3'" находятся в параллельном пучке лучей, идущем между объективами 2 и 4, то при приближении (удалении) призмы 3'" к призме 3" изображение правой марки не будет сходить с точки снимка.
Призма 1 и объектив 2, а в левой ветви и система 3 находятся на суппорте установки децентраций Δу.
Координатограф соединяется с прибором через редукторы 5 (см. рис. 78), расположенные сзади прибора. Сменой шестерен в редукторах устанавливают коэффициент перехода от масштаба модели к масштабу карты.
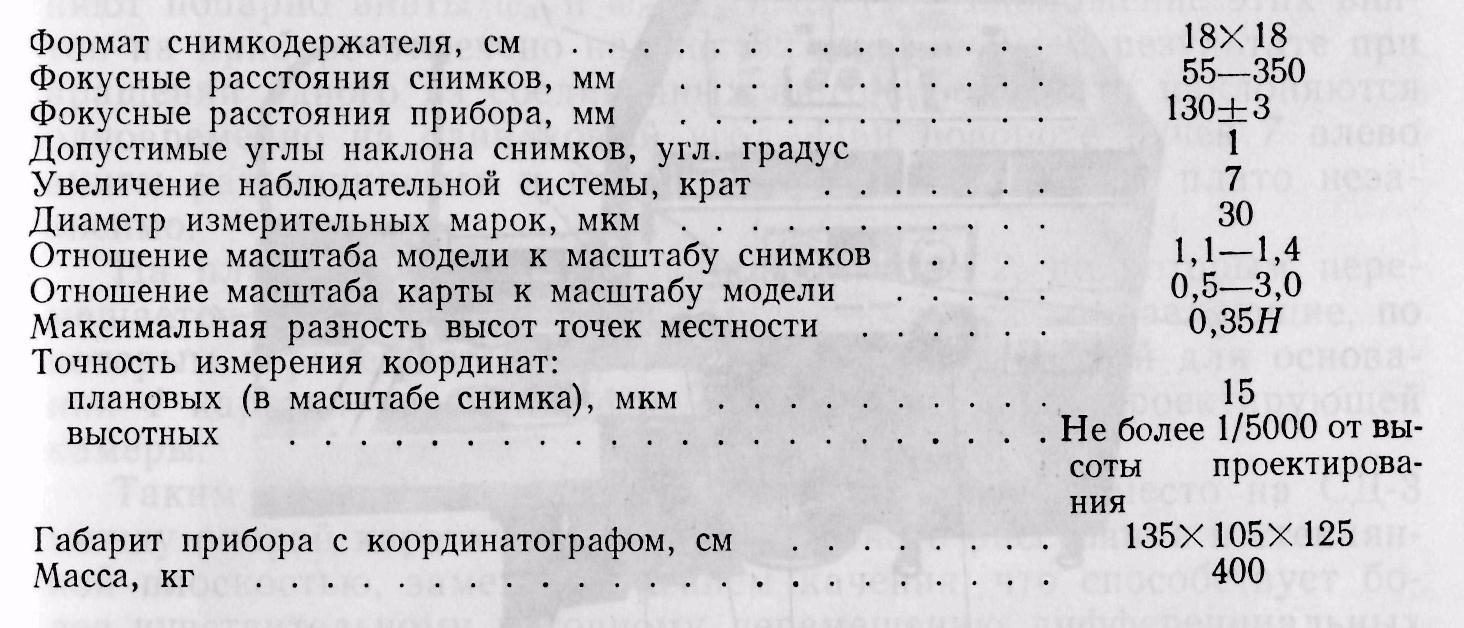
Технические характеристики стереографа СД-3: