

§ 4. Построение изображения в оптической системе
Для построения изображения объекта при помощи идеального объектива используются законы геометрической оптики: прямолинейность распространения света в однородной среде, законы отражения и преломления лучей на границе двух сред.
Идеальный объектив отличается следующими особенностями:
пучок лучей, исходящий из одной точки, т. е. гомоцентрический пучок, после прохождения объектива остается гомоцентрическим. Отсюда следует, что каждая точка изображается точкой;
плоскость, перпендикулярная к оптической оси, изображается также плоскостью, перпендикулярной к этой оси;
изображение плоского объекта, расположенного перпендикулярно к оптической оси, подобно самому объекту.
Оптическая схема идеального объекта и его основные элементы представлены на рис. 9: F и F'—передний и задний фокусы; FF' — оптическая ось; H и H '— передняя и задняя главные плоскости; S и S' — передняя и задняя узловые точки (предполагается, что объектив находится в однородной среде — воздухе); Fo и Fo′ — передняя и задняя фокальные плоскости; f об и f'об— переднее и заднее фокусные расстояния. В данном случае f об = f'об
Главные плоскости оптически сопряжены и линейное увеличение в них β=1. Поэтому с точкой q плоскости H оптически сопряжена точка q' плоскости H ' и S'q' = Sq. Угловое увеличение в узловых точках γ =1. Отсюда следует, что углы us и us, равны, т. е. сопряженные лучи, проходящие через узловые точки, взаимно параллельны.
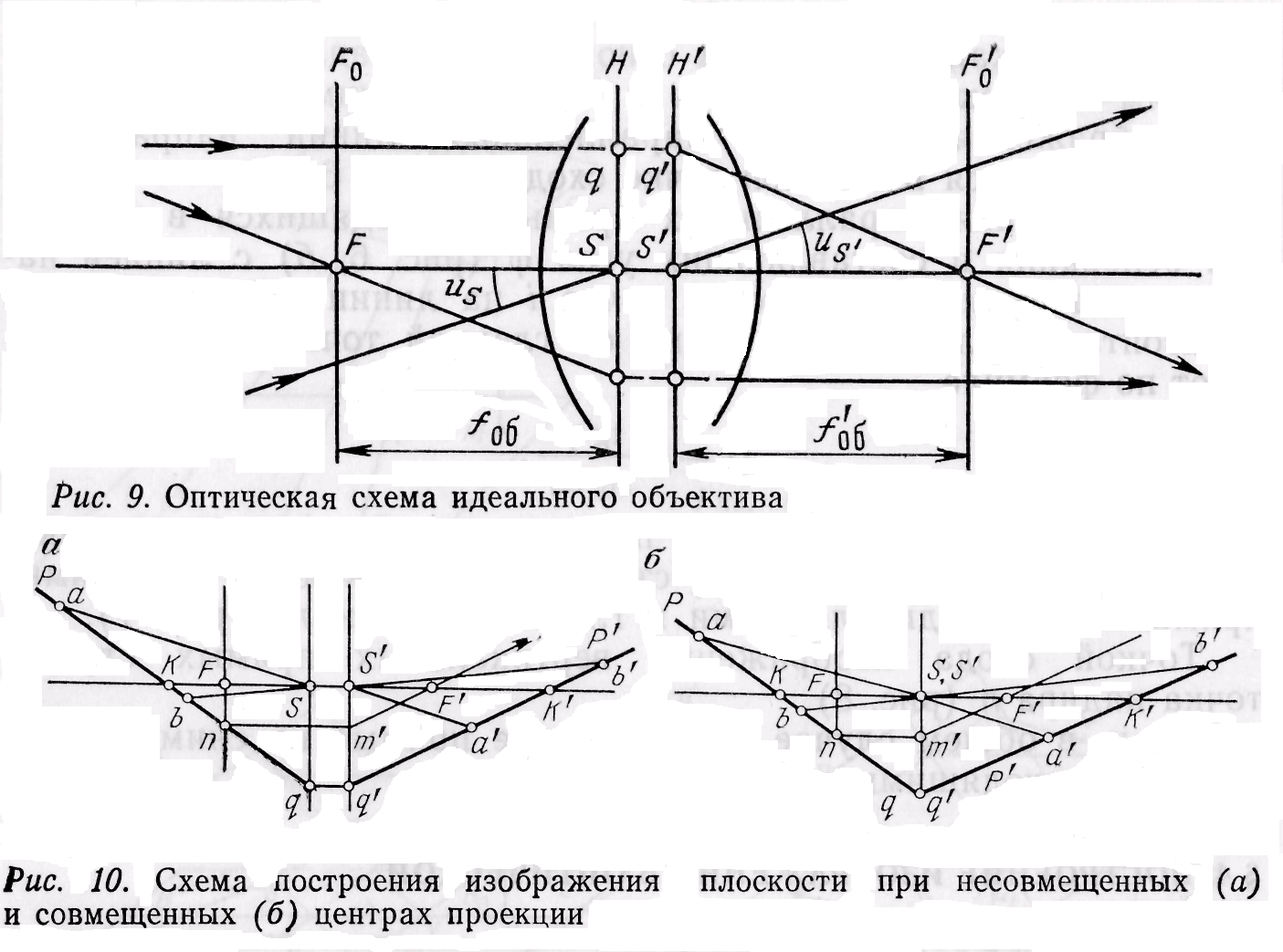
Зная основные элементы объектива, можно построить сопряженные лучи, когда падающие лучи параллельны оптической оси, или проходят через передний фокус, или направлены к передней узловой точке. Такие построения выполнены на рис. 9.
Построим изображение плоскости Р, представленной на рис. 10, а следом, пересекающим оптическую ось в точке К.
Продолжим след плоскости Р до пересечения с главной плоскостью в точке q. Для построения следа оптически сопряженной плоскости достаточно найти изображения двух точек, принадлежащих следу плоскости Р. Пусть такими точками будут q и точка п, находящаяся в передней фокальной плоскости.
Изображение точки q находится в точке q', а изображение точки п — на луче m'F' в бесконечности. Следовательно, изображение сопряженной плоскости пройдет через точку q' параллельно лучу m'F'.
Оптически сопряженные точки плоскостей Р и Р' лежат на взаимно параллельных лучах: Sa║S'a', Sb║S'b', SK║S'K'. Отсюда следует, что оптическое изображение плоскости является ее центральной проекцией. При этом для пространства объектов центром проекции служит передняя узловая точка (внешний центр), а для пространства изображения — задняя узловая точка (внутренний центр).
При построении изображения объекта внешний и внутренний центры проекции можно считать совпадающими (рис. 10, б), так как расстояние между главными плоскостями не влияет на направление лучей в пространстве изображений, а следовательно, и на размеры изображения. Поэтому изображения в плоскостях Р и Р' конгруэнтны.
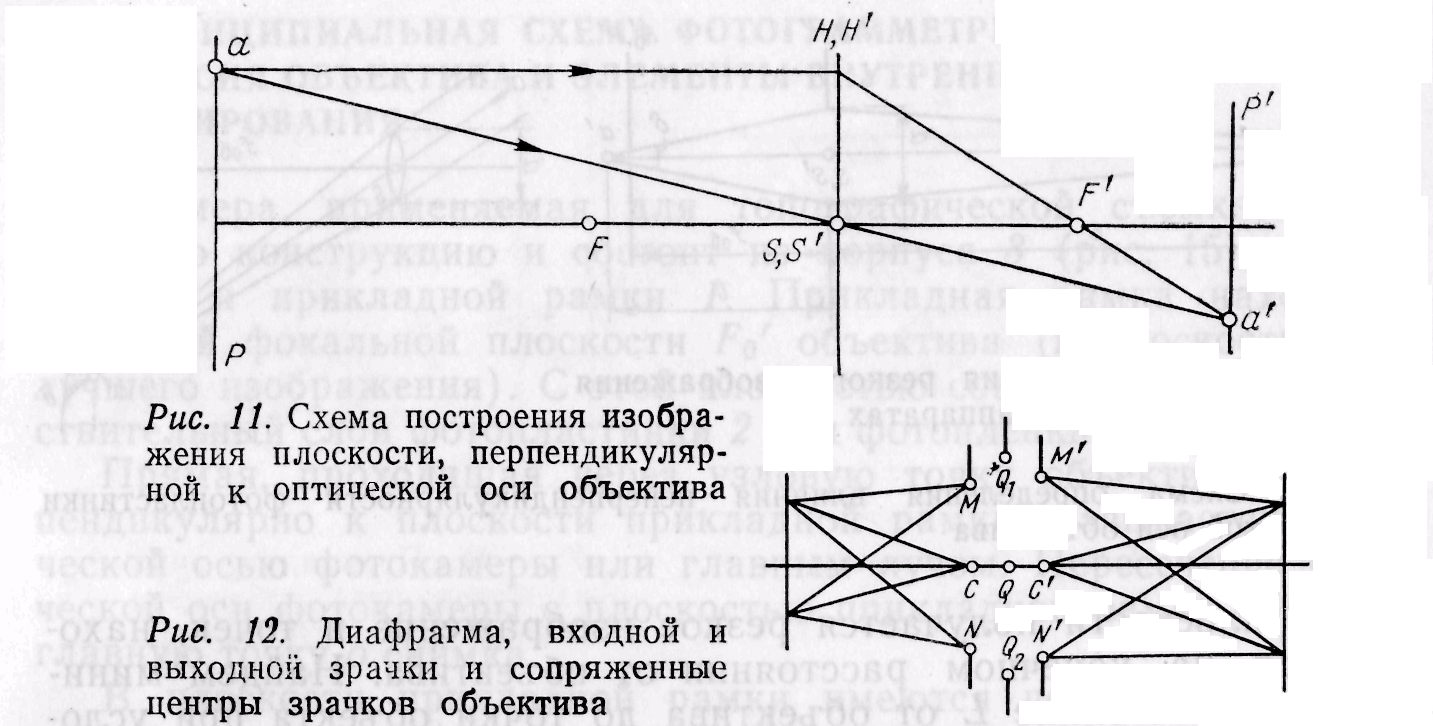
Изображение плоскости Р' построено в плоскости Р (рис. 11), перпендикулярной к оптической оси объектива и находящейся на конечном расстоянии от центра проекции S. В этом случае расстояние от центра проекции до сопряженной плоскости Р' больше фокусного расстояния объектива. Оно уменьшается при удалении плоскости Р и становится равным фокусному расстоянию объектива, когда плоскость Р находится в бесконечности.
Пучок световых лучей, проходящих через объектив, ограничивается диафрагмой Q1Q2 (рис. 12), которая обычно помещается внутри объектива. Оптические изображения отверстия диафрагмы линзами объектива, расположенными между диафрагмой и объектом, а также между диафрагмой и изображением, называются соответственно входным MN и выходным M'N' отверстиями или зрачками объектива. Оба зрачка и диафрагма взаимно сопряжены. С центром диафрагмы Q сопряжены центры зрачков С и С′, которые являются физическими центрами проекции.
Входной и выходной зрачки симметричного объектива всегда находятся в соответствующих главных плоскостях, так как диафрагма установлена посередине объектива. Поэтому физические и геометрические центры проекции в этих объективах совмещены. Зрачки и главные плоскости несимметричного объектива не совпадают, поэтому не совпадают физические и геометрические центры проекции. Это несовпадение не вызывает искажений в изображении плоского объекта, а при изображении пространства на плоскости оно вносит малые искажения, не имеющие никакого практического значения.
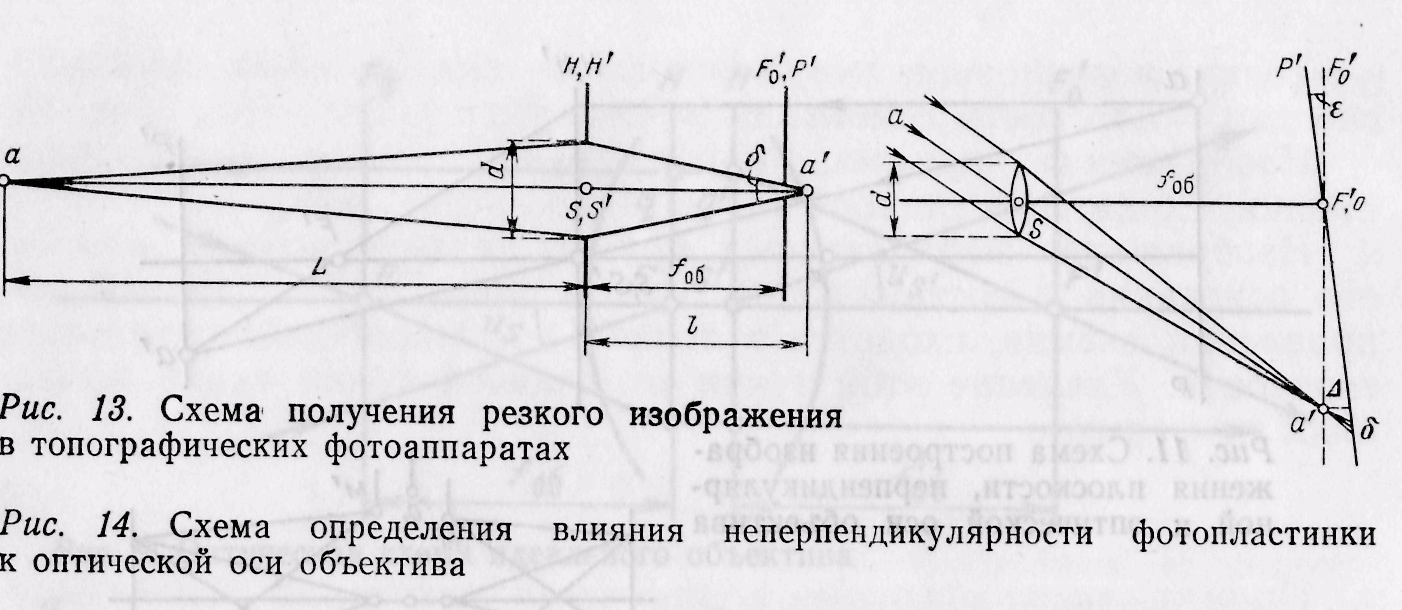
В топографических фотоаппаратах светочувствительный слой фотопластинки или фотопленки размещается в фокальной плоскости Fo´ (рис. 13). Теоретически с точками фокальной плоскости сопряжены бесконечно удаленные точки. Но практически в этой плоскости получается резкое изображение и точек, находящихся на конечном расстоянии от объектива. Найдем минимальное расстояние L от объектива до точки объекта при условии, что изображение этой точки в фокальной плоскости имеет кружок нерезкости, не превышающий заранее заданной величины.
Из оптики известно, что
![]()
откуда
![]()
Здесь
I
—
расстояние от точки S'
до
резкого изображения а'
точки
а. Но
![]()
где d — диаметр выходного зрачка; δ — диаметр кружка нерезкости. Следовательно,
![]() (6)
(6)
Пусть f об = 200 мм, относительное отверстие d: f об =1:6, т. е.
d=33 мм. Потребуем, чтобы δ =0,02 мм. Применительно к аэрофотосъемке это означает, что в данном случае минимальная высота фотографирования H=L = 330 м.
Найдем допустимую ошибку установки эмульсионного слоя фотопластинки или фотопленки в положение, перпендикулярное к оптической оси объектива. Пусть плоскость этого слоя проходит через задний фокус объектива и составляет угол ε с фокальной плоскостью (рис. 14). Тогда удаленная точка а изобразится в виде кружка с диаметром δ. При этом
![]()
где А = хε, а х = оа'. Потребуем, чтобы δ = 0,02 мм. Тогда при d: fo6= I : 6 и х = 80 мм получим ε = 5'.