

Глава 10 стереометр
§ 62. Теория стереометра стд-2 и описание его устройства
При идеальном случае стереотопографической съемки превышение каких-либо двух точек местности, изобразившихся на снимках, можно определить по формуле
![]()
если известна высота фотографирования H1 над плоскостью, проходящей через начальную точку, и продольный параллакс р° начальной точки.
Для этого на стереокомпараторе необходимо измерить величину Δр0 — разность параллаксов искомой и начальной точек.. Можно также решить и обратную задачу; например, определить на снимках разность параллаксов Δр0 двух точек с известными геодезическими отметками, использовав формулу
![]()
где h=AГ —A1 представляет собой превышение какой-либо горизонтали с отметкой AГ относительно отметки начальной точки A1.
Вычислив разность Δр0, можно сложить ее с параллаксом начальной точки и тем самым установить отсчет по винту продольного параллакса стереокомпаратора, соответствующий отметке горизонтали. Далее, наблюдая стереомодель, отмечают на ней места совмещения стереомарки с моделью по всему полю стереоскопического перекрытия, последовательно соединяя их непрерывной линией, которая и будет являться изображением горизонтали данного сечения.
Эта идея была положена в основу разработанного Ф. В. Дробышевым способа изображения рельефа местности по стереопарам планового случая стереотопографической съемки, отличающегося от идеального тем, что они получены при наклонном базисе и уклонении оптических осей от нормали на углы а, со и развороте снимков в своих плоскостях на углы .
Для реализации этого способа Ф. В. Дробышевым в период с 1932 по 1952 г. были созданы различные виды стереометров и в том числе стереометр топографический (СТД-2) с дополнительными механизмами, разработанными М. Д. Коншиным, повышающим точность работы прибора при обработке снимков со значительными разностями превышений.
В приборах используется компараторная схема измерений. Все они оснащены специальными коррекционными механизмами для автоматического введения поправок в измеренные по плановым снимкам разности продольных параллаксов в соответствии с теми искажениями, которые возникают вследствие отклонения их от идеального случая съемки.
Известно, что продольный параллакс есть разность абсцисс одноименных точек стереопары p = =x1—х2, следовательно, его искажение будет зависеть от искажения абсцисс, т. е. δр = δx1—δх2, которые можно найти, если воспользоваться приближенными формулами, выведенными ранее: для левого снимка
![]()
для правого снимка
![]()
где член x2ΔH/H1 выражает поправку в абсциссу правого снимка за счет наклона базиса фотографирования.
Заменяя в поправочных членах этих формул x1 на х2+р и y1 на у2, получим
Найдем разности этих выражений

Принимая
![]() ,
запишем
,
запишем

Приняв за начальную точку главную точку правого снимка O2 и обозначив ее параллакс через р1, получим
![]()
Подставляя выражение (172) в (171), после преобразования будем иметь
Координаты начальной точки o2 х2 = y2 = 0 и Δр = 0, тогда ее параллакс будет равен

Вычитая из выражения (173) выражение (174) и отбрасывая по малости член Δp2α1/f, получим

Выражение (175) называется формулой СТД-2.
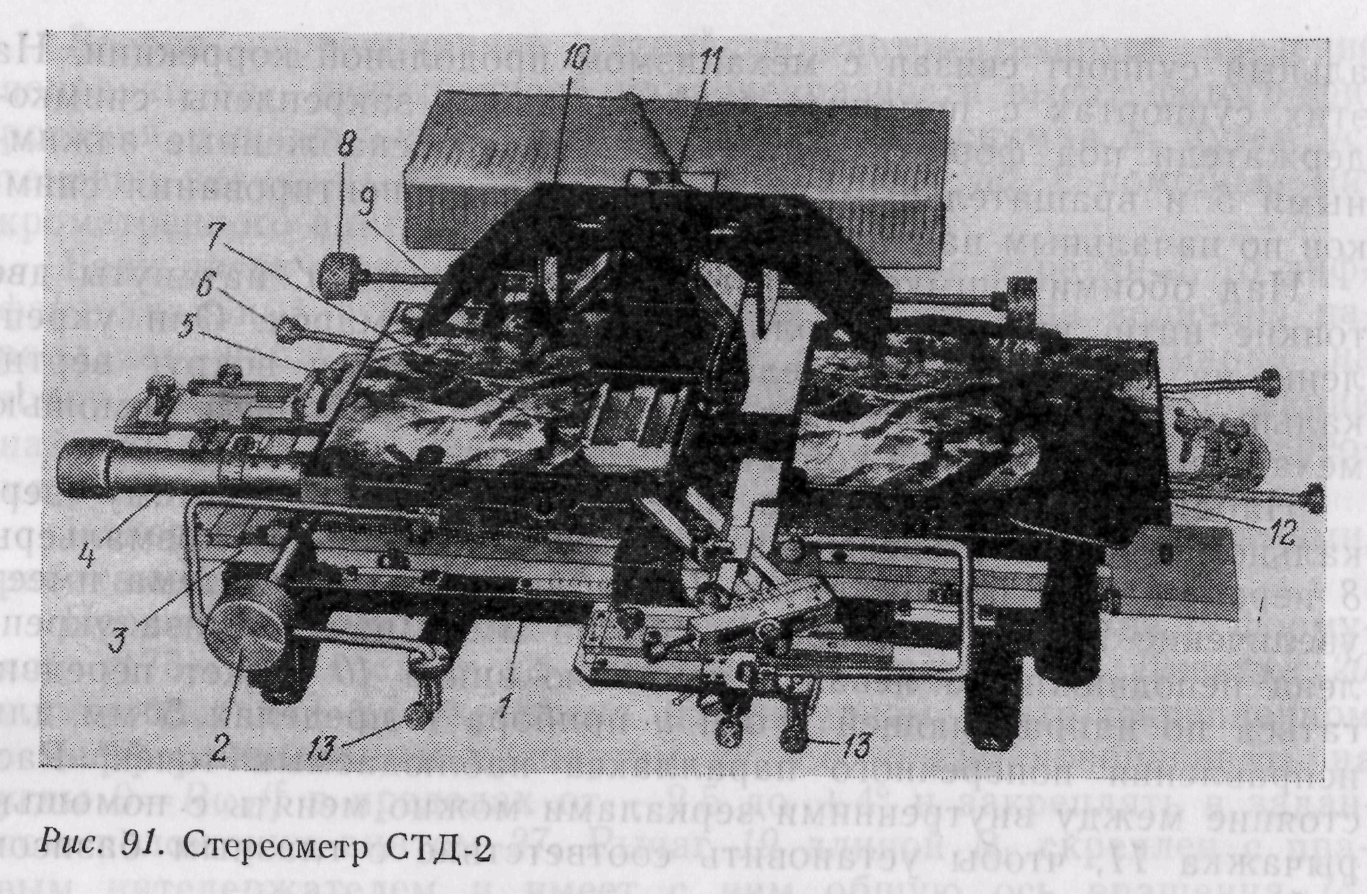
Общий вид топографического стереометра СТД-2 показан на рис. 91. На станине 1 укреплены попарно четыре шарикоподшипника, служащие направляющими оси хх прибора. Между ними с помощью кремальеры 2 перемещается в пределах от —85 до + 40 мм от нулевого значения общая каретка 3. На ней размещены направляющие параллактического и дифференциального суппортов.
 Параллактический
суппорт с помощью винта 4
перемещается
параллельно оси х
в
пределах от 45 до 90 мм и позволяет измерять
продольные параллаксы с точностью 0,01
мм. Дифференциальный суппорт связан с
механизмом продольной коррекции. На
этих суппортах с помощью осей вращения
закреплены снимкодержатели под формат
снимков 18 ×18 см, снабженные зажимными
5
и
вращательными 6
винтами
для ориентирования снимков по
начальным направлениям.
Параллактический
суппорт с помощью винта 4
перемещается
параллельно оси х
в
пределах от 45 до 90 мм и позволяет измерять
продольные параллаксы с точностью 0,01
мм. Дифференциальный суппорт связан с
механизмом продольной коррекции. На
этих суппортах с помощью осей вращения
закреплены снимкодержатели под формат
снимков 18 ×18 см, снабженные зажимными
5
и
вращательными 6
винтами
для ориентирования снимков по
начальным направлениям.
Над обоими снимкодержателями вдоль оси уу' натянуты две тонкие нити, играющие роль измерительных марок. Они укреплены на двух нитедержателях 13, вращающихся вокруг вертикальных осей, закрепленных под станиной прибора с помощью механизмов поперечной коррекции.
Наблюдательная система представляет собой систему зеркально-линзового стереоскопа 9, которая с помощью кремальеры 8 перемещается по мостику у 7. Наблюдательная система имеет увеличение 2,5х и поле зрения 55×55 мм. Правая линза укреплена неподвижно, а левая с помощью винта 10 может передвигаться по направляющей 7 оси у прибора в пределах 5 мм для исправления поперечного параллакса наблюдаемых точек. Расстояние между внутренними зеркалами можно менять с помощью рычажка 11, чтобы установить соответствие с глазным базисом наблюдателя.
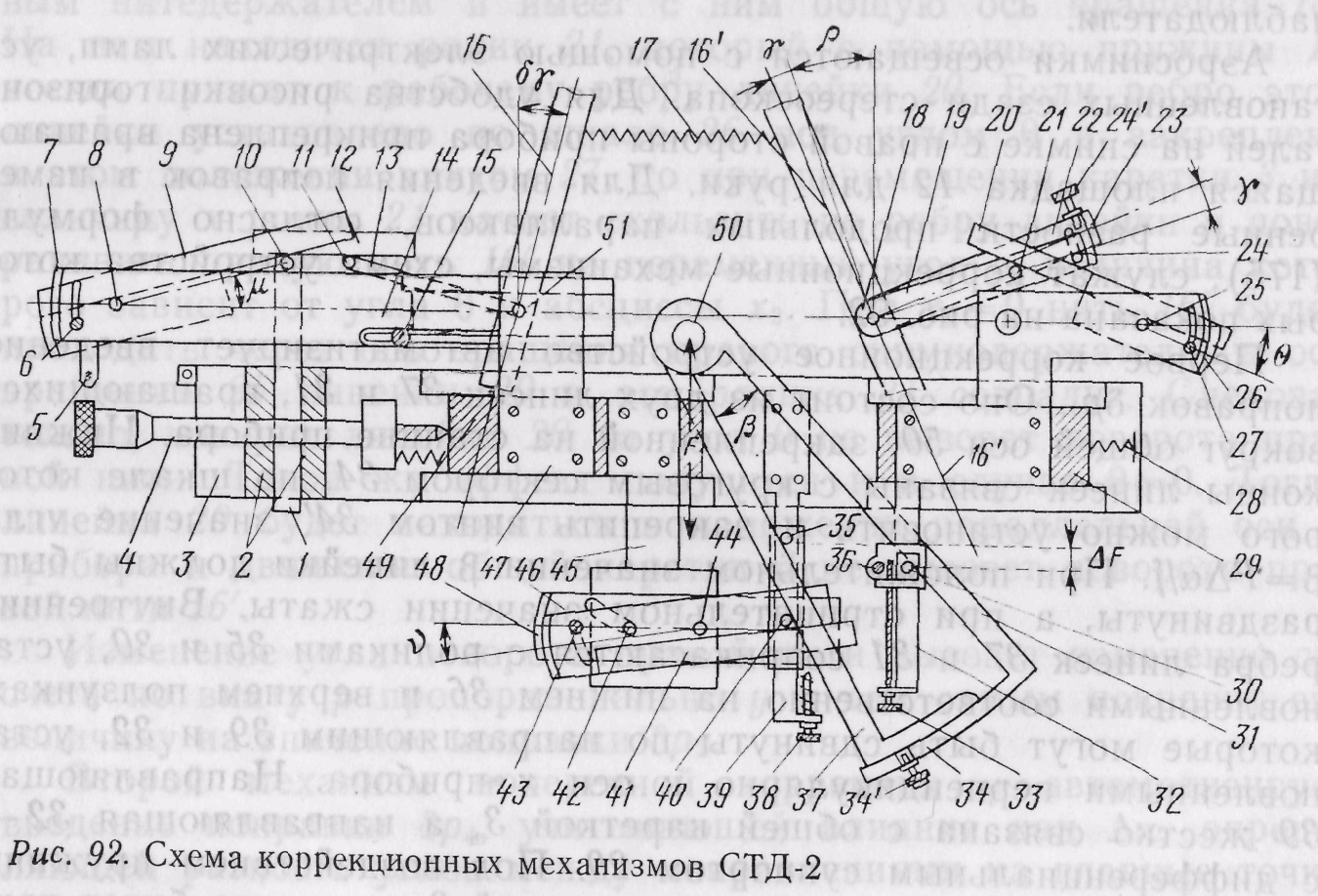
Аэроснимки освещаются с помощью электрических ламп, установленных сзади стереоскопа. Для удобства рисовки горизонталей на снимке с правой етороны прибора прикреплена вращающаяся площадка 12 для руки. Для введения поправок в измеренные разности продольных параллаксов, согласно формуле (175), служат коррекционные механизмы, схема устройства которых показана на рис. 92.
Первое
коррекционное устройство автоматизирует
введение поправок δp1,.
Оно
состоит из двух линеек 37
и
31,
вращающихся
вокруг общей оси 50,
закрепленной
на станине прибора. Нижние концы линеек
связаны с круговым сектором 34,
по
шкале которого можно установить и
закрепить винтом 34'
значение
угла β
= FΔα/f.
При положительном значении β линейки
должны быть раздвинуты, а при отрицательном
значении сжаты. Внутренние ребра линеек
37
и
31
соприкасаются
с роликами 35
и
30,
установленными
соответственно на нижнем 36
и
верхнем ползунках, которые могут быть
сдвинуты по направляющим 39
и
32,
установленными
перпендикулярно к оси x
прибора. Направляющая 39
жестко
связана с общей кареткой 3,
а
направляющая 32
—
с дифференциальным суппортом 29.
Под
воздействием пружины 28,
связывающей
этот суппорт с кареткой 3,
он
всегда будет прижимать ролики 35
и 30 к ребрам
линеек 37
и
31.
Если
ролики находятся на одном и том же
отстоянии F
от
оси вращения 50,
а
линейки параллельны (β = 0), то при движении
каретки 3
по
оси х
дифференциальный
суппорт будет оставаться неподвижным
(δp1
= 0). Если
линейки непараллельны (β![]() 0),
то при движении каретки 3
дифференциальный
суппорт 29
сместится
на величину δp1
и тем самым изменит отсчет по
параллактическому винту при
стереоскопическом наведении марки на
точку модели.
0),
то при движении каретки 3
дифференциальный
суппорт 29
сместится
на величину δp1
и тем самым изменит отсчет по
параллактическому винту при
стереоскопическом наведении марки на
точку модели.
Второе коррекционное устройство автоматизирует введение поправки δp2, учитывающей влияние разности высот фотографирования и продольного угла наклона левого снимка α1 путем установки величины ΔF между роликами 35 и 30, с помощью ми-крометренного винта 33.
Если после этого осуществить перемещение каретки 3, то дифференциальный суппорт 29 сдвигается по оси х на величину параллакса наблюдаемой точки при наведении стереомарки на точку. В литературе эти два механизма продольной коррекции называют масштабно-конвергентным устройством стереометра.
Поперечная коррекция осуществляется двумя механизмами, работающими совместно.
Первый из них вводит поправку δp3 в соответствии с формулой (175). Он состоит из линейки 20 и рычага 19. Линейка 20 с помощью оси 25 укреплена на фигурном плато, скрепленном с дифференциальным суппортом 29. Ее можно поворачивать на углы θ = Rω2/f в пределах от —2,5 до +4° и закреплять в заданном положении винтом 27. Рычаг 19 длиной R1 скреплен с правым нитедержателем и имеет с ним общую ось вращения 18. На нем находится ролик 21, который с помощью пружины 17 всегда прижат к рабочему ребру линейки 20. Если ребро этой линейки установлено по шкале 26 под углом 6 и закреплено в этом положении винтом 27, то при перемещении каретки 3 на величину х ролик 21 начнет скользить по ребру линейки и поворачивать правую нить 16' на переменный угол ρ, величина которого зависит от угла 8 и абсциссы х2. При х2 = 0 нить 16' будет проходить через ось вращения правого снимкодержателя, а ось вращения 25 линейки 20 и ось ролика 21 совпадут. Следовательно, поворот линейки 20 на угол 6 не вызовет поворота правой нити. Такой же эффект получится и в случае θ = 0. (Тогда линейка 20 будет находиться в положении параллельной оси х прибора и движение общей каретки 3 не вызовет поворота правой нити 16'.
Изменение угла поворота правой нити вызовет изменение отсчета по винту р пропорционально у и тем самым исправит его величину на значение поправки δp3.
Второй механизм поперечной коррекции у автоматизирует введение поправки δp4, учитывающей влияние как Δх, определяющей разность углов между направлениями на главные точки и точки надиров снимков, составляющих стереопару, так и поперечного угла наклона левого снимка ω1. Он состоит из рычага 22, скрепленного с правым нитедержателем под углом 90°, вращающимся вместе с ним вокруг оси 18. Для приведения корректора в действие нужно по шкале 23 с помощью микрометренного винта 24' установить между рычагами 19 и 22 угол у и скрепить их в этом положении винтом 24. Шкала 23 позволяет установить угол у в пределах от —4 до +8° с точностью ±2'. В результате поворота нити на постоянный угол можно изменить отсчет параллакса на величину δр4 пропорционально ординате наблюдаемой точки y2.
Для автоматизации введения поправки δр5, учитывающей дополнительное продольное горизонтирование модели на угол α1, в связи с превышениями точек местности установлен корректор ν. Он устроен следующим образом. К параллактическому суппорту 49 прикреплен кронштейн 45, имеющий направляющую, установленную параллельно оси х, на которой в небольших предела перемещается суппорт 46, если открепить зажим 42. На этом суппорте с помощью оси 44 закреплена линейка 41, которую можно повернуть на угол ν в пределах ±5° и закрепить в нужном положении винтом 43. Линейка 41 имеет выступающую рабочую грань, которая прижимается к ролику 40, установленному на нижнем ползунке направляющей 39 масштабно-конвергентного устройства.
Если линейка 41 установлена параллельно оси х (ν = 0), то при перемещении параллактического суппорта 49 винтом 4 ролик 40 будет скользить по ребру линейки, не вызывая смещения нижнего ползунка по направляющей 39. В этом случае поправки δр5 = 0. Если же линейку 41 установить по шкале 48 на вычисленное значение угла ν, то при перемещении параллактического суппорта микрометром 4 ребро линейки 41 будет давить на ролик 40 и нижний ползунок переместится по направляющей 39, изменив тем самым длину линейки 37 конвергентного устройства β, что приведет к дополнительному изменению величины ΔF масштабного корректора, а следовательно, и отсчета р по шкале продольных параллаксов 4.
Для установки корректора в исходное положение используется фиксатор 38. Он позволяет при наведении стереоскопической марки на начальную точку модели винтом 4 закрепить суппорт 46 винтом 42 в такое положение, при котором ось вращения 44 линейки 41 совпадет с осью ролика 40. После этого фиксатор 38 снова устанавливают в нейтральное положение во избежание поломки прибора. Учет поправки δр6, связанной с дополнительным поперечным горизонтированием модели на угол ω1, осуществляется коррекционным устройством μ, так как коррекционное устройство γ выполняет это недостаточно точно из-за неучета влияния превышений точек местности.
Механизм дополнительной поперечной коррекции связан с одной стороны с поворотом левого нитедержателя 16, а с другой — с параллактическим суппортом. Он устроен следующим образом. На плато 47, связанное жестко с суппортом 49, укреплена направляющая 14, ось которой параллельна оси х прибора. Ее положение относительно суппорта 49 можно зафиксировать винтом 15. На левом конце направляющей 14 находится ось вращения 8 линейки 9. Ее можно установить с помощью шкалы 7 под углом μ к оси направляющей 14 в пределах ±5° и закрепить в нужном положении винтом 6. Рабочее ребро линейки 9 находится в касании с роликом 10, установленным на толкателе 1, имеющем вертикальную и горизонтальную составляющие. Вертикальная составляющая может перемещаться по оси у прибора по направляющей 2, закрепленной на основной каретке 3. К горизонтальной направляющей 12 с помощью пружины 17 прижат ролик 11, закрепленный на конце рычага 13, связанный под прямым углом с левым нитедержателем и вращающийся вместе с ним вокруг оси 51.
Для установки корректора в начальное положение используется фиксатор 5, позволяющий при стереоскопическом наведении марки на исходную точку модели винтом 4 закрепить направляющую 14 винтом 15 в такое положение, при котором ось вращения 8 линейки 9 будет совпадать с центром ролика 10. Если после этого на шкале 7 поставить вычисленное значение угла μ и закрепить линейку 9 винтом 6, освободить фиксатор 5, то при наведении марки на какую-либо точку винтом 4 линейка 9 через ролик 10 сместит толкатель 1 по оси у. В результате горизонтальная направляющая 12 через ролик 11 повернет рычаг 13, длина которого равна Ro, а вместе с ним и левую нить 16 на угол δу. Его величина будет зависеть от Δр = pi—p1. Сама же поправка δp6 будет изменяться пропорционально ординате у наблюдаемой точки.
Седьмая поправка δp7 формулы (175) не автоматизируется, а вводится в измеренное значение Δрi аналитическим путем.