

7.2.3. Решение основных задач счисления пути судна на карте
Для нахождения счислимого места на заданное (текущее) время следует (рис. 7.2):
®зафиксировать показания судовых часов с точностью до±1 минуты(11.00);
®зафиксировать отсчет лага (ОЛ1) с точностью до 0,1 мили(60,4);
®рассчитать пройденное судном расстояние по лагу:
![]() (7.6)
(7.6)
![]() .
.
(для VЛ = 18 уз.®КЛ= 1,02)SЛ = 1,02´11,8 =12,0мили.
®рассчитать пройденное судном расстояние по оборотам его движителей:
![]() (7.7)
(7.7)
где VОБ– скорость хода судна по оборотам его движителей (VОБ=18,0);
t– время плавания от исходной точки (Т0 = 10.20) до заданной (Т1 = 11.00) (40 мин.).
SОБ=12,0мили
(3 кб./мин.´40мин.= 120кб.= 12,0мили = 18уз.´![]() =
12,0мили).
=
12,0мили).
при условии, что SЛ = SОБ®отложить его значение (в масштабе карты) от исходной точки по линии истинного курса и нанести счислимое место судна (на 11.00) условным знаком (штрих ^ линии ИК ~ 5 мм).
Рядом со счислимым местом записать
дробью
![]()
![]() .
.
При ведении счисления часто возникает необходимость знать время и отсчет лага прихода судна в заданную точку(точку встречи, точку якорной стоянки и т.д.).
Такая точка может быть задана (рис. 7.3):
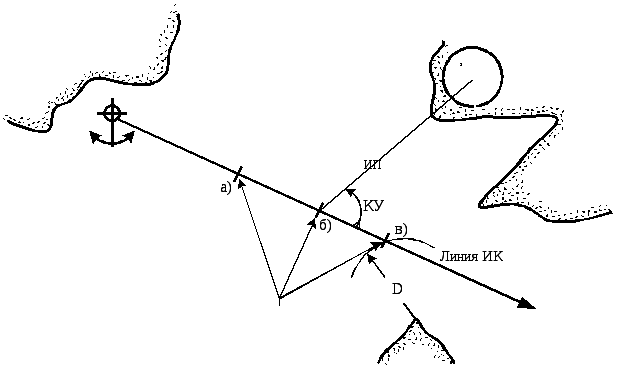
Рис. 7.3. Способы значения на карте заданной точки
а)®координатами (j, l);
б)®направлением на ориентир (ИПилиКУ);
в)®расстоянием (D) до ориентира и др.
Порядок решения подобной задачиуже рассматривался в главе 5.
Кратко напомним:
®найти заданную точку на линииИК(аилибилив);
®измерить расстояние (S) по линииИКот исходной точки до заданной;
®рассчитать время, которое нужно, чтобы пройти этоSзаданнойV
![]() ; (7.8)
; (7.8)
®рассчитать время прихода в заданную точку
![]() ; (7.9)
; (7.9)
®рассчитать значение
![]() (7.10)
(7.10)
где КЛ– коэффициент лага для заданной скорости (V);
®рассчитать значение отсчета лага, которое будет на счетчике лага с приходом в заданную точку
![]() . (7.11)
. (7.11)
Пока мы рассматривали счисление пути судна для неизменного (постоянного) его курса. Во время плавания судно меняет курс очень часто. Учет изменений курса ®в п. 7.3.
7.3. Циркуляция судна и ее графический учет
7.3.1. Циркуляция судна и ее элементы
Если на ходу судна вывести руль из диаметральной плоскости – его нулевого положения, т.е. переложить его на какой-либо угол вправо или влево, то судно начнет описывать на поверхности воды кривую, называемую циркуляцией.
Циркуляцией называется криволинейная траектория, которую описывает центр тяжести судна при изменении курса.
В первом приближении кривая циркуляции представляет собой дугу окружности с определенным диаметром (радиусом), зависящим для данного судна от угла перекладки руля, скорости хода и осадки судна (его загрузки).
Циркуляция судна характеризуется следующими основными элементами (рис. 7.4):
Тактическим диаметром циркуляции.
Полупериодом циркуляции.
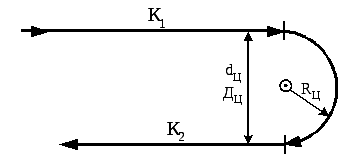
Рис. 7.4. Основные элементы циркуляции судна
Тактическим диаметром циркуляции называется кратчайшее расстояние между линией первоначального курса судна и линией его курса после поворота на 180° измеренное в кабельтовых.
Обозначается как – dЦилиДЦ.
Тактический радиус циркуляции– есть половинаdЦ(ДЦ) и обозначается как –RЦ.
Полупериод циркуляции ® время, в течении которого судно совершает поворот на 180°.Измеряется в минутах и обозначается –t180°.
Элементы циркуляции определяются в сроки, предусмотренные руководящими документами по правилам, изложенным в ПОМЭС.
Сторона поворота и угол перекладки руля обозначается:
при повороте судна вправо – П-5°, П-10°… П-20°… П-30°;
при повороте судна влево – Л-5°, Л-10°… Л-20°… Л-30°.