

4.2. Расчет истинных направлений по гирокомпасу и гироазимуту
4.2.1. Расчет истинных направлений по гирокомпасу
Теоретически главная ось чувствительного элемента (ЧЭ) гирокомпаса (ГК) должна располагаться по направлению линии истинного меридиана.
Однако, под влиянием сил трения,
инструментальных погрешностей и других
причин, она отклоняется от плоскости
истинного меридиана на некоторый угол
и установится в плоскости гироскопического
(гирокомпасного) меридиана, тогда
– угол в плоскости истинного горизонта
между северной частью истинного меридиана
(NИ) и северной
частью гирокомпасного меридиана (![]() )
называетсяпоправкой
гирокомпаса. Обозначается
как –DГК.
)
называетсяпоправкой
гирокомпаса. Обозначается
как –DГК.
Если гирокомпасный меридиан отклонен от истинного к востоку (к Е) – рис. 4.2, то поправка гирокомпаса считается положительной и при вычислениях ей придается знак «+».
|
|
|
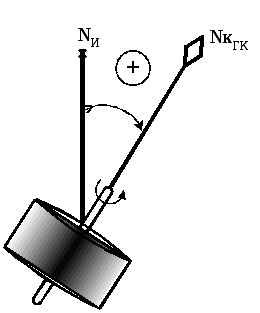
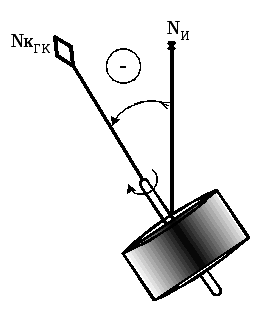
Рис. 4.2. Поправка гирокомпаса Рисунок 4.3. Поправка гирокомпаса
(положительная) (отрицательная)
Если гирокомпасный меридиан (![]() )
отклонен от истинного меридиана (NИ)
к западу (кW) – рис.
4.3, то поправка гирокомпаса считается
отрицательной и при вычислениях ей
придается знак «–».
)
отклонен от истинного меридиана (NИ)
к западу (кW) – рис.
4.3, то поправка гирокомпаса считается
отрицательной и при вычислениях ей
придается знак «–».
Зависимость между гирокомпасными и истинными направлениями (рис. 4.4) выражается формулами:
![]() (4.1)
(4.1)
![]() (4.2)
(4.2)
(формулы алгебраические).
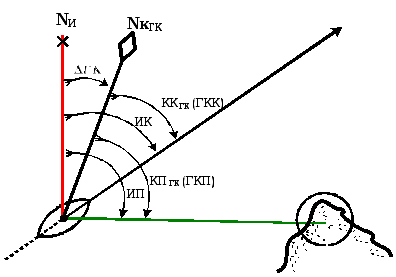
Рис. 4.4. Расчет истинных направлений по гирокомпасу
Примечание:
ГКК (ККГК) – гирокомпасный курс;
ГКП (КПГК) – гирокомпасный пеленг.
4.2.2. Расчет истинных направлений по гироазимуту
Для расчета истинных направлений по
гироазимуту должна быть известна его
поправка на заданный момент (DГАЗ),
зависящая от значения исходной его
поправки (DГА0)
и скорости ухода ЧЭ ГА от начального
направления (![]() ).
).
Зная время, прошедшее с момента определения
исходной поправки ГА (DГА0)
можем рассчитать величину изменения
поправки ГА к заданному моменту![]() и тогда искомая поправка ГА на заданный
момент времени вычисляется по формуле:
и тогда искомая поправка ГА на заданный
момент времени вычисляется по формуле:
![]() (4.3)
(4.3)
Зависимость между гироазимутальными и истинными направлениями выражается следующими формулами:
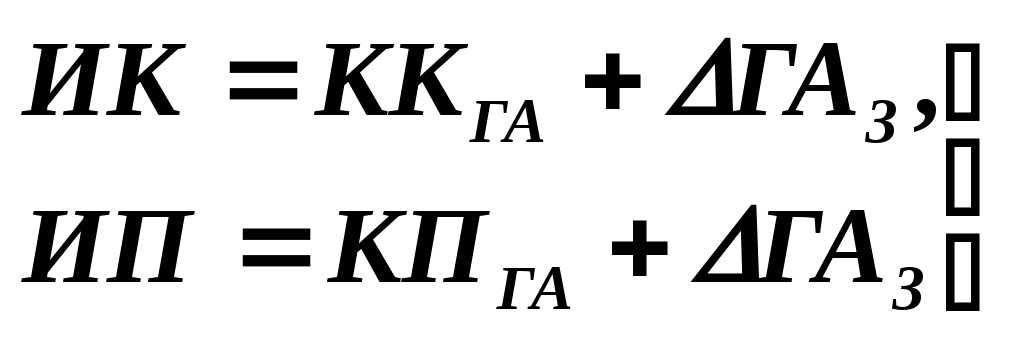 (4.4)
(4.4)
 (4.5)
(4.5)
Решение этих зависимостей возможно только в том случае, если мы знаем величину постоянной поправки гироскопического курсоуказателя, а для гироазимута еще и остаточную скорость ухода его главной оси ЧЭ.
4.3. Способы определения поправок гироскопических курсоуказателей
4.3.1. Общие положения
Практика судовождения показывает, что большинство навигационных ошибок в той или иной мере связано с неверными показаниями курсоуказателей. Поэтому необходимо использовать любую возможность и в порту и в рейсе для определения их поправок.
Поправка курсоуказателей обязательно определяется:
при регламентных проверках курсоуказателей в сроки, установленные технической документацией;
при подготовке к рейсу;
периодически во время перехода.
При использовании гирокомпаса в качестве курсоуказателя необходимо знать его постоянную поправку (DГК), характеризующую среднее положение равновесия его чувствительного элемента (ЧЭ).
При использовании гироазимута (ГА) должна быть известна его поправка на заданный момент (DГА), зависящая от исходной поправки и скорости ухода оси его ЧЭ от начального направления.
Поправка любого курсоуказателя (DК) определяется сравнением истинного пеленга (ИП) какого-либо створа, светила или предмета с его компасным пеленгом (КП) в тот же момент времени, т.е.
![]() (4.6)
(4.6)
Постоянная поправка гирокомпаса (DГК)определяется при установившемся режиме его работы по ряду мгновенных его поправок, наблюденных не менее чемза 2,5 – 3 часа*.Элементы движения судна в этот срок должны быть неизменными.
При экстренной съемке с якоря (бочки или швартовов) следует учитывать DГК,полученную из прежних наблюдений.
Для вычисления постоянной поправки гирокомпаса (DГКП) применяется формула:
 (4.7)
(4.7)
где
![]() – алгебраическая сумма значений
мгновенных поправок, определенных с
интервалом 10-15 минут;
– алгебраическая сумма значений
мгновенных поправок, определенных с
интервалом 10-15 минут;
n– число определенийDГКi.
*Примечание:Время 2,5 – 3 часа берется из того расчета, что именно за это время главная ось ЧЭ ГК совершает полный «цикл» отклонений относительно NГК.
Мгновенная поправка гирокомпасавычисляется по формуле:
![]() (4.8)
(4.8)
где ИПиКП– истинный (эталонный) и компасный пеленги ориентира соответственно.
Ориентирами для измерения пеленгов могут быть:
а)– небесное светило;
б)– теодолитный пост;
в)– створ;
г)– отдаленный ориентир, положение которого известно.
Мгновенную поправку ГК можно также определить по сличению с показаниями другого курсоуказателя, поправка которого известна.