

6.1.4. Требования, предъявляемые к морской навигационной карте
Для графического учета плавания судна на навигационной карте ведется прокладка его пути, а также прокладываются направления на различные ориентиры ®линии пеленгов. Для удобства пользования навигационной картой необходимо, чтобы линия курса изображалась на карте прямой линией. Курс и пеленг определяются на поверхности Земли как углы между меридианом и направлением ДП судна или направлениями на выбранные для пеленгования объекты. Углы на картографической проекции, применяемой в навигации, должны быть равны углам на поверхности Земли.
Отсюда и два основных требования к навигационной карте:
линия курса судна – локсодромия – должна изображаться на карте прямой линией;
картографическая проекция должна быть равноугольной.
Если курс судна будет 0°или 180°, то линия курса совпадает с меридианом, значит, меридианы должны быть прямыми линиями.
Если курс судна будет 90°или 270°, то линия курса совпадает с параллелью (или экватором), значит и параллели (и экватор) должны быть тоже прямыми линиями.
Чтобы линия курса пересекала различные меридианы под равными углами необходимо, чтобы все меридианы на карте были параллельны.
Все параллели на карте также будут параллельны.
И все меридианы будут перпендикулярны параллелям и экватору.
Картографическая проекция, удовлетворяющая поставленным требованиям ®проекция голландского картографа Герарда Кремера (1512¸1594), носившем латинское имя Меркатор. Предложена в 1569 г.
Эта, предложенная Меркатором, проекция относится к разряду нормальных цилиндрических проекций и применяется до нашего времени.
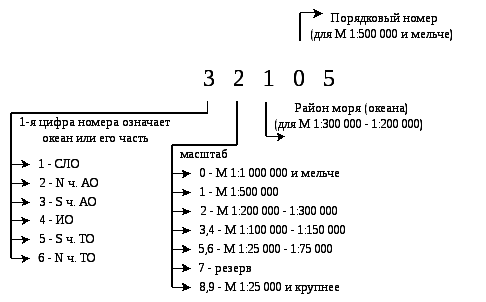
6.1.5. Система адмиралтейских номеров морских навигационных карт
6.2. Принцип построения проекции Меркатора
6.2.1. Картографические проекции и их классификация
Карта ® плоское, искаженное изображение земной поверхности, на котором искажения подчинены определенному математическому закону.
Положение любой точки на плоскости может быть определено пересечением двух координатных линий, которые однозначно соответствовали бы координатным линиям на Земле (j, l). Отсюда следует, что для получения плоского изображения земной поверхности нужно сначала нанести на плоскость систему координатных линий, которая соответствовала бы таким же линиям на сфере. Имея нанесенную на плоскость систему меридианов и параллелей, можно теперь нанести на эту сетку любые точки Земли.
Картографическая сетка ® условное изображение географической сетки земных меридианов и параллелей на карте в виде прямых или кривых линий.
Картографическая проекция ® способ построения картографической сетки на плоскости и изображение на ней сферической поверхности Земли, подчиненный определенному математическому закону.
Картографические проекции по характеру искаженийделятся на:
Равноугольные(конформные)®проекции, не искажающие углов. Сохраняется подобие фигур. Масштаб изменяется с изменениемjи l. Отношение площадей не сохраняется (о. Гренландия»Африке,SАфр. »13,8 Sо.Гренландия).
2.Равновеликие(эквивалентные)®проекции, на которых масштаб площадей везде одинаков и площади на картах пропорциональны соответствующим площадям в натуре. Равенства углов и подобия фигур не сохраняются. Масштаб длин в каждой точке не сохраняется по разным направлениям.
3. Произвольные ®проекции, заданные несколькими условиями, но не обладающие ни свойствами равноугольности, ни свойствами равновеликости. Ортодромическая проекция®дуга большого круга изображается прямой линией.
Картографические проекции по способу построения картографической сеткиделятся на:
1.Цилиндрические®проекции, на которых картографическая сетка меридианов и параллелей получается путем проецирования земных координатных линий на поверхность цилиндра, касающегося условного глобуса (или секущего его), с последующей разверткой этого цилиндра на плоскость.
Прямая цилиндрическая проекция®ось цилиндра совпадает с осью Земли;
Поперечная цилиндрическая проекция®ось цилиндра перпендикулярна оси Земли;
Косая цилиндрическая проекция®ось цилиндра расположена к оси Земли под углом отличным от 0°и 90°.
2. Конические®проекции, на которых картографическая сетка меридианов и параллелей получается путем проецирования земных координатных линий на поверхность конуса, касающегося условного глобуса (или секущего его), с последующей разверткой этого конуса на плоскость. В зависимости от положения конуса относительно оси Земли различают:
Прямую коническую проекцию®ось конуса совпадает с осью Земли;
Поперечную коническую проекцию®ось конуса перпендикулярна оси Земли;
Косую коническую проекцию®ось конуса расположена к оси Земли под углом отличным от 0°и 90°.
3. Азимутальные ®проекции, в которых меридианы – радиальные прямые, исходящие из одной точки (центральной), под углами равными соответствующим углам в натуре, а параллели®концентрические окружности, проведенные из точки схождения меридианов (ортографические, внешние, стереографические, центральные, полярные, экваториальные, горизонтные).