

5.2. Принципы измерения скорости судна
Скорость хода судна измеряется специальными приборами ®лагами. В настоящее время на судах используются следующие системы (типы) лагов:
Вертушечные лаги(выпускаемые на лаглине и днищевые).
Частота вращения вертушки пропорциональна скорости хода судна. Коэффициент пропорциональности определяется на испытаниях. Число оборотов вертушки фиксируется на счетчике, указывающем пройденное судном расстояние.
Гидродинамические лаги (ГДЛ).
Приемные устройства этих лагов измеряют давление скоростного напора воды, возникающее при движении судна. На основании измеренной величины давления (разности динамического и статического давлений) в счетно-решающей схеме лага вырабатывается скорость хода судна и пройденное им расстояние. Для измерения разности давлений в этих лагах применяются пружинные (сильфонные) и жидкостные (ртутные) дифференциальные манометры. (ЛГ-25, ЛГ-50, ЛГ-4, ЛГ-6, МЛГ-25, МЛГ-50 и др.).
Индукционные лаги(ИЭЛ).
Принцип работы этих лагов основан на явлении электромагнитной индукции, возникающей при движении морской воды между двумя электродами в переменном магнитном поле. Источником магнитного поля в лаге служит электромагнит, питаемый переменным током. Он заключен в обтекатель, на поверхности которого расположены два измерительных электрода, соприкасающиеся с морской водой. Под воздействием переменного магнитного поля магнита, в воде возникает переменная э.д.с.. Амплитуда этой э.д.с. оказывается пропорциональной скорости движения электромагнита, а следовательно, и судна. Измерение сигнала, снимаемого с электродов, осуществляется по компенсационному методу. Если гидродинамические лаги дают устойчивые показания приV>3 уз., то индукционные®практически с0 уз.
Гидроакустические лаги(ГАЛ).
Принцип их работы основан на использовании эффекта Доплера. Импульс ультразвуковых колебаний, посылаемых с судна, отражается от грунта и возвращается обратно к судовому приемнику лага. При движении судначастота принятого сигнала будет отличаться от излучаемой в зависимости от скорости хода.
ГАЛы измеряют скорость хода судна не относительно воды, как все указанные выше, а относительно грунта и поэтому считаютсяабсолютнымилагами (а не относительными). Однако устойчивая работа этих лагов возможна при сравнительно небольших глубинах моря, но точность их работы очень высокая.
Лаги всех систем, как и любые другие приборы, не могут давать абсолютно точных показаний, они требуют периодической выверки и регулировки. Та часть погрешности в показаниях лага, которая не может быть скомпенсирована, определяется на «мерной линии» и затем учитывается с помощью поправки лага.
Поправка лага– величина, равная относительной погрешности, выраженной в процентах и взятой с обратным знаком, т.е.
![]() (5.6)
(5.6)
где SЛ– действительное расстояние, пройденное судном;
РОЛ – расстояние, пройденное судном по счетчику лага (РОЛ=ОЛ2-ОЛ1)
![]() (5.7)
(5.7)
где V0– истинная скорость судна;
VЛ– скорость судна по показаниям лага.
5.3. Определение скорости судна. Поправка и коэффициент лага
Скорость судна или корабля (V) и поправки их лагов (DЛ%) определяются различными способами:
на визуальной мерной линии;
с помощью судовой РЛС;
с помощью РНС высокой точности;
на кабельной мерной линии и др.
Все способы определения VиDЛ% различаются между собой только методикой получения истинного расстояния (S), необходимого для расчета истинной скорости хода судна (V0)®см. рис. 5.4, 5.5, 5.6.
Рассмотрим один из способов ®определение скорости хода судна (V) и его поправки лага (DЛ%) на визуальной мерной линии.
Визуальная мерная линия®специально оборудованный полигон для проведения скоростных испытаний судов.
Такой полигон должен отвечать следующим требованиям:
– располагаться в стороне от путей движения кораблей и судов;
– быть свободным от навигационных опасностей (>2 миль) и укрытым от ветра и волны;
– должен обеспечивать свободу маневра (V£36уз.®L= 3мили;V£24уз.®L= 2милииV£12уз.®L= 1миле);
– иметь возможность обеспечить требуемую точность определения места и безопасность плавания;
– иметь глубины, исключающие влияние мелководья на скорость хода судна (при осадке в 5 миV£30уз. Н ³ 95 м).

Рис. 5.1. Визуальная мерная линия
Визуальная мерная линия оборудуется секущими (Б, В, Г) створами (не<2-х), направление которых перпендикулярно линии пробега судна (рис. 5.1), а расстояние между створами измерено с высокой точностью.
Некоторые мерные линии оборудуются ведущим створом, по которому направляется линия пробега судна (А).
Методика определения скорости хода (V) и поправки лага (DЛ%) сводится к следующему:
®судно, на установившемся режиме работы движителей, т.е. при постоянном числе оборотов движителей (винтов), делает пробег по ведущему створуА. (При отсутствии ведущего створа, курс на пробеге удерживается перпендикулярным направлению секущих створовБ, В, Г).
При пересечении линии Iсекущего створа (Б) по команде «Ноль!» включаются секундомеры наблюдателей и снимаются отсчет лага (ОЛ1) и отсчет с суммарного счетчика оборотов движителей (n1).
При пересечении линии IIсекущего створа (ГилиВ) по команде «Ноль!» останавливаются секундомеры и снимаются: – отсчет лага (ОЛ2) и отсчет с суммарного счетчика оборотов движителей (n2).
®рассчитывается истинная скорость судна на пробеге по формуле:
![]() (5.8)
(5.8)
где S– расстояние (из формуляра или описания мерной линии) между секущими створамиБиГ(илиБиВилиВиГ) (т.е. длина пробега, которая устанавливается в зависимости от скорости хода судна на пробеге: еслиV<12уз. – 1миля;еслиV= 12¸24уз. – 2мили;еслиV>24уз. – 3мили);
ti – среднее время пробега в секундах (осредненное время всех секундомеров).
®рассчитывается скорость судна на пробеге по лагу по формуле:
![]() (5.9)
(5.9)
где РОЛ = ОЛ2 – ОЛ1– разность отсчетов лага (показаний счетчика лага).
®рассчитывается число оборотов движителей в минуту на пробеге по формуле:
![]() (5.10)
(5.10)
где
![]() .
.
®рассчитывается поправка лага в процентах (DЛ%) на пробеге по формуле:
![]() (5.11)
(5.11)
®рассчитывается коэффициент лага (КЛ) на пробеге по формуле:
![]() (5.12)
(5.12)
Для исключения влияния течения на результаты на каждом режиме работы движителей выполняется:
а)®по 2 пробега®если скорость течения в районе мерной линии постоянна;
б)®по 3 пробега®если течение не постоянно и его элементы (КТ, uТ) недостоверны.
Режимов работы движителей должно быть не менее 3-х (как правило: I– «ПХ» –назначенный ход;II– «СХ» – 75% от «ПХ»;III– «МХ» – 50% от «ПХ»). На каждом режиме выполняется (обычно) по 3 пробега и после расчетов имеем:
1-й пробег:VО1, VЛ1, N1, DЛ1%;
2-й пробег:VО2, VЛ2, N2, DЛ2%;
3-й пробег:VО3, VЛ3, N3, DЛ3%.
®рассчитываются для конкретного, назначенного, режима работы движителей средние значения искомых величин:
а)®истинная (относительная) скорость хода судна (VО) на режиме по формуле:
![]() ; (5.13)
; (5.13)
б)®скорость хода судна по лагу (VЛ) на режиме по формуле:
![]() ; (5.14)
; (5.14)
в)®число оборотов движителей (винтов) на режиме по формуле:
![]() ; (5.15)
; (5.15)
г)®поправку лага в процентах (DЛ%) на режиме по формуле:
![]() ; (5.16)
; (5.16)
д)®коэффициент лага (КЛ) на режиме по формуле:
![]() . (5.17)
. (5.17)
Примечание:
Если на режиме выполняется не 3 а 2 пробега, то формулы (5.13¸5.17) примут вид:
![]() (5.13а)
(5.13а)
![]() (5.14а)
(5.14а)
![]() (5.15а)
(5.15а)
![]() (5.16а)
(5.16а)
![]() (5.17а)
(5.17а)
®далее судно выполняет пробеги на визуальной мерной линии наII-м и наIII-м назначенном режиме работы движителей, по результатам которых рассчитываются по формулам (5.13¸5.17):
II режим–VOII,VЛII,NOII,DЛII%,КЛII;
III режим–VOIII,VЛIII,NOIII,DЛIII%,КЛIII.
®по результатам замеров на мерной линии составляются:
|
а)график соответствия скорости хода судна частоте вращения движителей (рис. 5.2) |
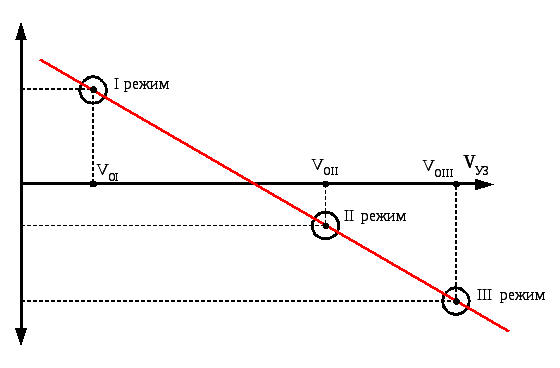
б)график соответствия поправки лага (DЛ%) скорости хода судна (рис. 5.3) |
|
Рис. 5.2. График соответствия скорости хода судна частоте вращения его движителей |
Рис. 5.3. График соответствия поправки лага скорости хода судна |

С этих графиков снимаются данные для заполнения рабочих таблиц штурмана (РТШ).
Соответствие скорости хода частоте вращения движителей
и поправке (коэффициенту) лага
Таблица 5.2.
|
Обороты |
Vуз. |
DЛ% |
КЛ |
|
50 70 : |
6 9 : |
+7,0 +5,0 : |
1,07 1,05 : |
Данные определений (расчетов) записываются в «Формуляр судна», СЖ и РТШ.
Одновременно с определением скорости хода на мерной линии замеряется расход топлива на 1 милю плавания на каждом режиме. По результатам этих замеров выявляется экономическая скорость, часовой расход топлива, продолжительность плавания в часах данной скоростью, дальность плавания судна в милях.