

1.3.4. Радиолокационные определения места судна
Радиолокаторы (радары), которые называют также радиолокационной станцией (РЛС), позволяют обнаруживать надводные объекты при хорошей и плохой видимости, измерять их пеленги и расстояния. Радиолокатор предназначен для безопасного расхождения судов и для определения места своего судна, включая плавание в стесненных водах.
Значение радиолокатора для обеспечения безопасности мореплавания чрезвычайно велико – после компаса он является важнейшим средством судовождения. Международная конвенция предусматривает установку радиолокатора на всех судах валовой вместимостью 300 рег.т. и более. На судах вместимостью 3 тыс. рег.т. и более требуется иметь два независимых радиолокатора (с устройством автоматического слежения за целями, которое на судах более 10000 рег.т. должно быть заменено на средство автоматической радиолокационной прокладки (САРП) не менее 20 целей.
Общий принцип действия РЛС следующий. В передатчике генерируются электромагнитные колебания, которые излучаются антенной в форме узкого (по горизонтали) луча коротких импульсов радиоволн длиной 3,2 или 10 см. Отразившись от каких-либо объектов, эти импульсы принимаются той же антенной, приемный канал которой запирается на время посылки импульсов. Принятые антенной эхо-сигналы после усиления поступают на индикатор. Его основу составляет электронно-лучевая трубка. Развертка электронного луча идет от центра вдоль радиуса с мгновенным возвращением к центру. Начало каждого цикла развертки совпадает с моментом излучения импульса. В момент поступления усиленного эхо-сигнала на экране появляется пятнышко засветки. Так как скорость развертки в масштабе экрана в два раза меньше скорости распространения радиоволн, то засветка происходит на удалении от центра экрана, которое равно расстоянию до отражающего объекта (1 мкс соответствует 150 м).
Антенна равномерно вращается с частотой 15-20 об/мин, облучая все окружающее пространство. Синхронно с этим вращается и направление радиуса развертки на экране, так что в любой момент оно совпадает с направлением излучения и приема антенны. В результате на экране высвечиваются все окружающие объекты, а вследствие послесвечения экрана на нем образуется радиолокационное изображение. Поэтому его называют индикатором кругового обзора (ИКО). Четкость изображения на ИКО зависит от характеристик радиолокатора, расстояний до объектов и их отражающей способности, помех и других условий.
Благодаря связи с гирокомпасом радиолокационное изображение может быть ориентировано "по норду" (как на карте) или "по курсу". Для определений места рекомендуют первый вариант ориентировки, а при плавании в узкостях – второй.
Современный радиолокатор можно переключать на изображение относительного движения (ОД), когда свое судно в центре экрана, а объекты перемещаются по линии обратного движения (ЛОД) в масштабе изображения. Другой режим – ИД (истинного движения), когда по сигналам от лага центр развертки (свое судно) перемещается по линии курса, а неподвижные объекты остаются такими и на экране.
Важной характеристикой использования радиолокатора служит максимальная дальность обнаружения объектов. Наблюдениями установлено, что при высоте антенны 15-30 м ориентировочная дальность такого обнаружения следующая (мили): песчаный пляж – 0-0,5; низменный берег 1-5; обрывистый берег 10-25; горы 30-40; причалы и волноломы 5-10; суда 6-20; малые буи 0,5-2; средние и большие буи 2-6; буи с пассивными отражателями 6-8.
Минимальная дальность действия радиолокатора зависит от продолжительности импульсов , так как эхо-сигнал не может быть принят пока антенна работает на излучение. На шкалах крупного масштаба минимальная дальность около 2030 м.
Дистанции и направления определяются с помощью визира, отсчеты снимаются с дисплеев, один из которых дает дистанцию D, а другой – компасный радиолокационный пеленг (РЛП).
Оптимальная настройка РЛС
После прогрева станции и выполнения рутинных операций с целью полного использования имеющихся возможностей (тем самым увеличить безопасность судовождения), уменьшения вредного воздействия на штурмана и для продления срока службы необходимо оптимально настроить РЛС в следующей последовательности:
- регулировку яркости (BRILL), выставить в положение, когда линия развертки практически не видна, но при малейшем повороте вправо становится видимой. Это положение необходимо проверять регулярно, особенно при переключении шкалы дальности (с целью избежания неконтролируемого уменьшения яркости и потере слабых целей);
- регулировку общего усиления (GAIN) установить в положение, когда на экране видны редкие вспышки шума;
- регулировка ВАРУ ("помехи от волнения", ACS,STC,TVG) требует очень тщательной настройки, чтобы избежать подавления слабых целей вблизи судна. Никогда нельзя полностью подавлять помехи от волнения, достаточно на соответствующей шкале добиться изображения движущихся светлых гребней. Так как вероятность обнаружения на экране слабых целей низкая, следует усилить визуальное наблюдение;
- регулировка МПВ ("помеха от дождя", ACR,FTC) улучшает обнаружение цели на фоне ливня и грозового облака, но может до двух раз уменьшить максимальную дальность обнаружения; включать следует только для кратковременного просмотра. Может также применяться для увеличения разрешения по дистанции.
Достаточно опасны при неправильной установке регулировки CLIPPING(очищение экрана от слабых помех) иENHANCE(подчеркивание слабых целей).
Разрешающая способность и точность измерения пеленга и дальности.
В соответствии с рекомендациями фирм-изготовителей для судовых РЛС характерны следующие значения:
разрешающая способность по дальности (РСД) – наименьшее расстояние между объектами, расположенными на одном направлении от РЛС, при котором эти объекты наблюдаются на экране раздельно, для объектов, имеющих четкие очертания РСД составляет от 10 м (на ближних шкалах, до800 м на предельных шкалах;
- разрешающая способность по углу (РСУ) – наименьший угол между объектами, расположенными на одинаковом удалении от РЛС, при котором эти объекты на экране обнаруживаются отдельно друг от друга. РСУ 1,54, соответствует ширине диаграммы направленности антенны в горизонтальной плоскости.
Точность пеленгования характеризуется
средней квадратической погрешностью
![]() .
.
При совмещенном начале визира с началом развертки mn 1, при вынесенном визире mn3.
При измерении расстояний общая погрешность складывается из погрешности совмещения визира с передней кромкой эхо-сигнала и из погрешности калибровки РЛС.
Средняя квадратическая погрешность совмещения mD характеризует точность процесса измерения и составляет 0,6-1,0% от расстояния, если ориентир точечный, и до 3%, если расстояние измеряется до низменных участков береговой черты или с вынесенным визиром.
Средняя квадратическая погрешность калибровки РЛС обычно составляет 0,10,2 каб.
При работе с РЛС точность линии положения по расстоянию на дальностях 0,5 мили в несколько раз выше, чем по пеленгу, поэтому при радиолокационных определениях места предпочтение отдают способам, использующим расстояния.
К точечным ориентирам можно отнести небольшие острова, оконечности молов, резко выделяющиеся вершины гор, башни, радиолокационные маяки-ответчики и пассивные радиолокационные отражатели.
Здесь необходимо заметить, что вследствие конструктивных особенностей (и цены) для береговых радиолокационных станций (БРЛС) указанные параметры значительно лучше; mn0,20,3,mD15 м, что значительно повышает достоверность получаемой информации.
Радиолокационные определения места
При радиолокационных определениях места предпочтительнее способы, использующие измеряемые радиолокатором расстояния.
А. По трем расстояниям (ЗД) измеренным радиолокатором до надежно опознанных ориентиров наиболее точный и надежный способ (третья ЛП -контрольная). Измеренные Д прокладывают на карте в ее масштабе в виде дуг-засечек от изображений ориентиров (рис. 1.44.). В точке пересечения таких засечек, или в центре образованного ими треугольника, принимают обсервованное место и надписывают у него время и отсчет лага.
Для оценки точности места 95%-ным кругом
погрешностей служит формула
![]() для двух дистанций:
для двух дистанций:
![]() ,
,
где П – разность пеленгов объектов, до которых измеряют расстояния со средними квадратическими погрешностямиmD.
Последняя формула справедлива, если расстояния измеряют до объектов с практически вертикальной передней отражающей поверхностью – скалистый обрыв, гидротехническое сооружение и т.п. Напротив, когда измеряют расстояние до берега со склоном к морю, неизвестно какая часть склона дает изображения берега на экране – возникает погрешность объекта.
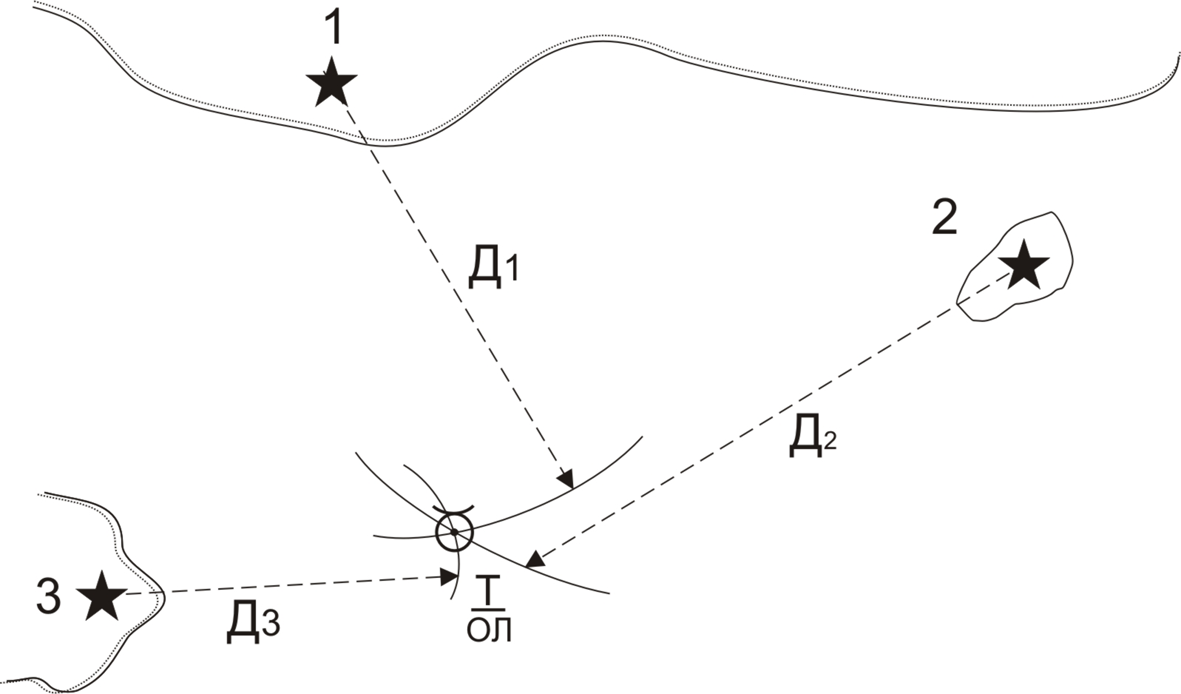
Рис. 1.44.
Радиолокационные обсервации по двум расстояниям не обеспечивают контроля на промахи.
Если имеется только один опознанный ориентир, то приходится определять место по радиолокационным пеленгу и расстоянию.
На карте проводят линию обратного исправленного пеленга:
ОИП = ИП 180; ИП = РЛП +ГК и вдоль нее откладывают измеренное расстояние Д – получают обсервованное место. Точность этого места оценивают по следующей формуле:
![]()
где mРЛП иmD– средние квадратические погрешности пеленга и расстоянияD.
В таких же условиях если позволяет видимость лучше применять комбинированное определение места по визуальному пеленгу и радиолокационному расстоянию. Прокладку на карте выполняют аналогично, а для оценки точности места служит формула
 .
.
Если расстояние измеряют вдоль линии пеленга, то П = 90иcosecП =1 .
Навигационное использование САРП
Большинство судов в мире оборудованы средствами автоматической радиолокационной прокладки (САРП) или ее упрощенным вариантом.
Главным назначением САРП является "уменьшение опасности столкновений" судов. Для этого предусмотрены автоматический или ручной захват целей с последующим их автосопровождением. При этом выдаются текущие пеленг РЛС и дальность РЛД, расчетные дистанция Dкри время Ткркратчайшего сближения, истинные курс и скорость целей (Кц, Кц).
Резолюция ИМО рекомендует применять САРП для навигационного использования. Для этого вручную захватывают и берут на автосопровождение надежно опознанный радиолокационный ориентир, например, скалу, островок. После этого непрерывно и автоматически измеряются радиолокационные пеленг РЛП и дальность РЛД объекта (с повышенной точностью). По этим данным вычислительное устройство САРП вырабатывает истинные курс и скорость объекта Кц, КциDкри Ткр.
Полученную информацию можно использовать для решения ряда навигационных задач, в т.ч.:
а. Получение обсервованного места судна. В любой момент штурман имеет возможность снять РЛП и D(с повышенной точностью) хорошо опознанного ориентира (исключается процесс измерения) и получить на карте точку по пеленгу и дистанции обычным путем. При наличии электронной карты, связанной с РЛС, процесс полностью автоматизирован.
б. Определение параметров течения. В случае автосопровождения неподвижного объекта истинная скорость цели Vц0; если на дисплее индицируется ненулеваяVц, это означает наличие неучтенного течения с параметрами:Vт=Vц; Кт=Кц 180. После этого необходимо или нажать клавишу "Вычисление и учет течения или "GPS" (что позволит вводить данные в САРП с учетом течения, как от абсолютного лага).
в. Управление судном по кратчайшему расстоянию Дкрдо ориентира. Если путь судна проходит на Дкрдо совпровождаемого объекта и указанное значение точно известно с карты (рис. 1.45.), то сравнивая его с показанием на дисплее, можно управлять судном по интегральному признаку – удерживая на дисплее заданное Дкр, тем самым учитывая воздействия ветра, течения и т.п.
Другие задачи рассмотрены в Инструкции по использованию конкретной САРП.
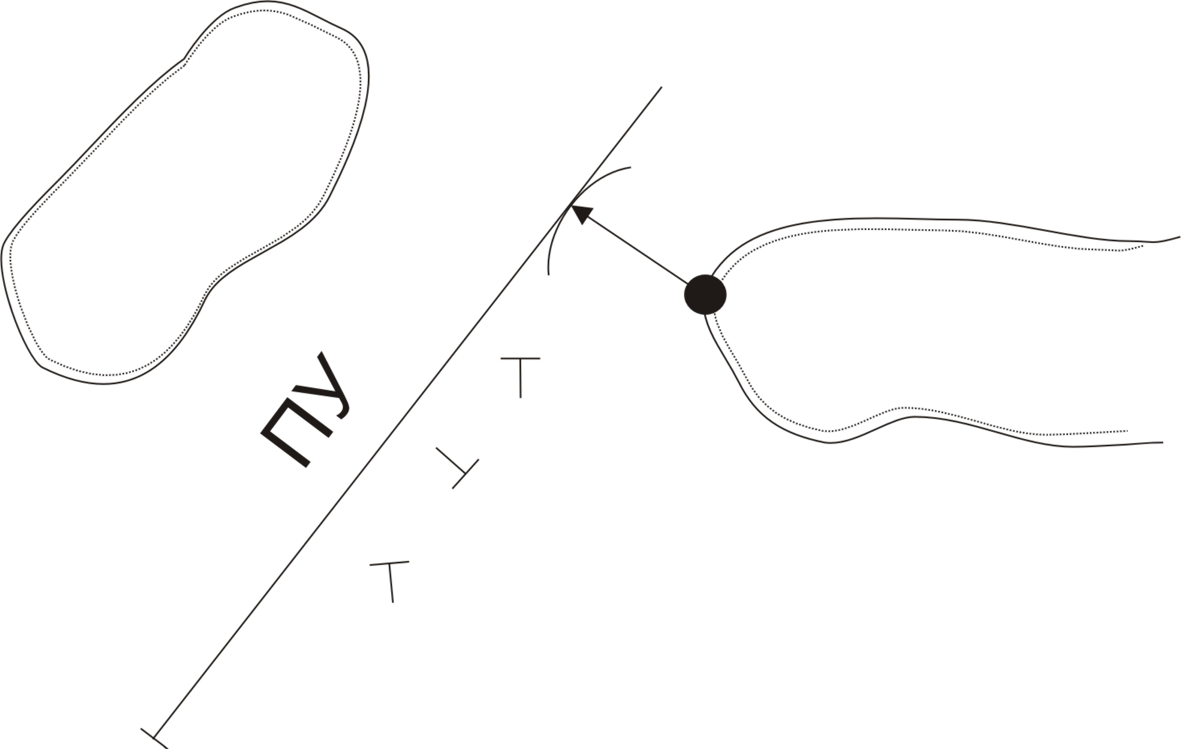
Рис. 1.45.
Повышение вероятности опознания ориентиров
Прежде чем выполнять радиолокационные измерения (с целью определения места судна) необходимо прочитать изображение на экране РЛС – т.е. опознать все РЛС-ориентиры (и идентифицировать объекты на экране и на карте). В большинстве случаев при наличии опыта работы с РЛС это не вызывает трудностей, но имеется немало участков побережья когда опознание превращается в сложную проблему; ошибки опознания приводят к промахам, и не раз были причиной аварий.
Безусловно, умение читать РЛС-изображение основывается на хорошем знании возможностей и ограничений конкретного радиолокатора. Следует иметь ввиду, что карта получена как бы наблюдая Землю сверху, а изображение на экране получено "рисующим" лучом заметной ширины (24) практически с уровня моря; поэтому возможны уширение, укорочение, удлинение и затемнение объектов, что иногда приводит к полной неузнаваемости участка берега.
Для повышения вероятности опознания ориентиров можно применять следующее:
- при наличии трех ориентиров получить место по трем дистанциям; на путевой карте треугольник погрешностей должен быть не более нескольких миллиметров (если правильно опознаны ориентиры);
- если имеется только два ориентира, следует измерить две дистанции и два пеленга: после получения обсервованной точки на карте по двум дистанциям необходимо измерить ИП на взятые ориентиры и сравнить с РЛП; учитывая поправку ГК и точность измерения можно сделать вывод о вероятности опознания ( упрощенный метод опознания по вееру пеленгом и дистанций);
- современные радиолокаторы имеют возможность измерять РЛП и Д между любыми двумя точками на экране ("Электронная линейка"). Измерив ИП и Д на карте между выбранными ориентирами и затем РЛП и Д на экране РЛС, учитывая точность измерений, можно сделать вывод о вероятности опознания выбранных ориентиров;
- в некоторых местах на низменных берегах ставятся группы пассивных радиолокационных отражателей (линия, треугольник). Дальность надежного опознания небольшая (5 8 миль);
- радиолокационные маяки (Ramark) являются активными излучателями, на экране обнаруживаются на значительном расстоянии в виде яркой линии от начала развертки до конца экрана, как и визуальные маяки, позволяют измерять только РЛП;
- самым надежным и удобным для использования является радиолокационный маяк-ответчик (Racon): Д = 535 миль; ответный сигнал кодируется по Морзе, что позволяет надежно опознавать, визир наводят на ближний край сигнала, что позволяет измерить Д и РЛП и получить место по пеленгу и дистанции. К сожалению, и это средство имеет недостатки: большинство РЛМ-ответчиков работают с некоторой периодичностью (до 120 сек) и сигналы от них подвержены интерференции, что приводит к периодическому значительному пропаданию приема ответного сигнала (экспериментально обнаруживалось до семи зон замирания сигнала на дистанции до 10 миль).
Помехи
Выше был указан ряд особенностей радиолокатора, затрудняющих идентификацию радиолокационного изображения. Существует еще ряд явлений, которые можно назвать помехами, затрудняющих работу с радаром. С некоторыми из них штурман встречается очень часто, другие – весьма редки, но чрезвычайно опасны, неучет их вызвал ряд тяжелых аварий.
1.Помеха от волнения.Проявляется в засветке экрана в начале развертки (возле судна) на расстоянии до5(рис. 1.46.). Для уменьшения интенсивности помехи служит регулировка ВАРУ (Помеха от моря,Sea,ACS,STC). Выше было упомянуто об опасности подавление слабых целей – никогда нельзя полностью убирать помеху с экрана (рис. 1.46 – стрелкой указано небольшое судно, обнаруженное после уменьшения уровня помехи).
Рис. 1.46.