

1.3.2. Визуальные определения
К визуальным относят определения по пеленгам, горизонтальным и вертикальным углам между направлениями на земные ориентиры. Еще пол века назад такие определения составляли более 90% всех определений, выполняемых на морских судах. Сейчас положение изменилось: возросла доля радионавигационных обсерваций, определения расстояний по вертикальным углам почти полностью вытеснены радиолокационными измерениями, а определения места по двум горизонтальным углам применяются лишь в редких, особых случаях. Тем не менее простые, достаточно надежные и точные определения места по визуальным ориентирам остаются на вооружение штурманов всех флотов и яхтенных капитанов.
А. Определение по двум пеленгам– простой, достаточно надежный и точный способ часто применяемый при плавании в видимости берегов.
Для пеленгования подбирают надежно опознаваемые ориентиры, пользуясь картой, лоцией и пособием "Огни и знаки". В темное время для опознания маяков и огней необходимо измерять их период секундомером. Среди видимых и нанесенных на карту ориентиров надо выбирать ближайшие с разностью пеленгов не менее 30и не более 150.
Пеленгование выполняют в быстрой последовательности, начиная с ориентиров, которые ближе к диаметральной плоскости судна (их пеленг медленнее изменяется), а ночью – с огней имеющих больший период. Компасные пеленги КП и названия ориентиров рекомендуется записывать в последовательности их наблюдения. Сразу же после пеленгования записывают судовое время Тси отсчет лага ОЛ.
И змеренные
пеленги исправляют поправкой используемого
компаса – получают исправленные
«истинные») пеленги: ИП = КП +К.
Обратные исправленные пеленги прокладывают
на карте: ОИП = ИП180
(рис. 1.33.). Полученное место обозначают
кружком с точкой, а рядом, проставляют
время и отсчет лага, показывают невязку,
если счисление переносят в обсервованную
точку. Пеленги, а если надо – то и
обсервованные координаты и невязку
заносят в Судовой журнал по правилам
его ведения.
змеренные
пеленги исправляют поправкой используемого
компаса – получают исправленные
«истинные») пеленги: ИП = КП +К.
Обратные исправленные пеленги прокладывают
на карте: ОИП = ИП180
(рис. 1.33.). Полученное место обозначают
кружком с точкой, а рядом, проставляют
время и отсчет лага, показывают невязку,
если счисление переносят в обсервованную
точку. Пеленги, а если надо – то и
обсервованные координаты и невязку
заносят в Судовой журнал по правилам
его ведения.
О полученном расхождении между счислением и обсервацией штурман обязан доложить капитану и стремиться определить его причину. Перенос счисления в обсервованную точку выполняется в случае, если обсервация не вызывает сомнений и точность ее выше точности счисли-мого места.
Рис. 1.33.
Исправленные пеленги содержат случайные погрешности.
Для оценки точности места 95%-ным кругом погрешности используют общую формулу (R), подставляя в нее градиент пеленгаgп= 57,3/D:
![]() ,
,
где П – разность пеленгов, D1и D2– расстояния до ориентиров.
Одиночное определение по двум пеленгам не позволяет выявить ошибки в опознании ориентиров или промахи, допущенные при пеленговании, записях или прокладке. Поэтому получаемое место надо сопоставлять с другими обсервациями и счислением, с глубинами, измеренными эхолотом и контролировать другими даже менее точными обсервациями. Кроме того, если позволяют условия, необходимо измерять пеленг третьего ориентира.
Определение места по трем пеленгам надежнее, чем по двум: линии трех пеленгов обычно не пересекаются в одной точке, а образуют треугольник погрешностей. Возникает два вопроса: о выборе обсервованного места относительно такого треугольника и об оценке точности этого места.
Если треугольник погрешностей на карте небольшой, то обсервованное место принимают в его центре (или ближе к меньшей стороне).
Большой треугольник возникает от неверного опознания ориентиров, или промаха пеленга, или большой погрешности в принятой поправке компаса. При появлении такого треугольника лучше всего повторить определение места.
Для оценки точности места, полученного по трем пеленгам, также имеются строгие формулы, по которым составлены программы для ЭВМ. При решении задачи вручную рекомендуется выбрать две линии пеленгов от ближайших ориентиров пересекающиеся с благоприятным углом. По этим двум линиям и оценивают точность места, но центр эллипса или круга погрешностей принимают в обсервованной точке, полученной с учетом третьего пеленга; место по трем пеленгам на 10-15% точнее, что создает «запас» в безопасную сторону.
Почти все навигационные измерения выполняет один судоводитель в быстрой последовательности так, что изменениями измеряемых параметров из-за перемещения судна можно пренебречь. Такие наблюдения считают практически одновременными. В отличие от этого разновременными называют наблюдения, результаты которых приводят к одному месту судна по счислению за время между наблюдениями. Полученное таким образом место называют счислимо-обсервованным, а его координаты обозначают соисо.
Перемещение судна за время t между наблюдениями характеризуют в общем случае вектором S, направление которого равно путевому углу ПУ, а длина – S = V.T, где V – путевая скорость судна. Ограничимся случаем двух наблюдений, первое из которых приводят ко второму, что выполняют графически или аналитически.
Графическое приведение наблюдений к одному месту состоит в том, что первую изолинию (все ее точки) или, в частности, линию положения, смещают вектором S. Такая приведенная изолиния в пересечении с изолинией вторых наблюдений дает искомое счислимо-обсервованное место. Чтобы не загромождать карту у счислимого места рекомендуют смещать вектором S изображение ориентира и через эту точку прокладывать приведенную изолинию. Сложную изолинию (например, изобату) наносят на кальку, которую смещают вектором S, сохраняя ориентацию относительно меридиана, и уколом циркуля получают на карте искомую точку пересечения двух изолиний.
Крюйс-пеленг применяют когда возможно только пеленгование и только одного ориентира. Измеряя его пеленг замечают отсчет лага ОЛ1, выждав изменение пеленга не менее, чем на 30, повторяют пеленгование, замечая времяТси ОЛ2. Если нет дрейфа и течения, то от изображения ориентира на капрте А проводят линию истинного курса, вдоль которой откладывают плавание по лагу Sл= Кл(ОЛ2– ОЛ1) – получают смещенное положение ориентира А(рис. 1.34.).
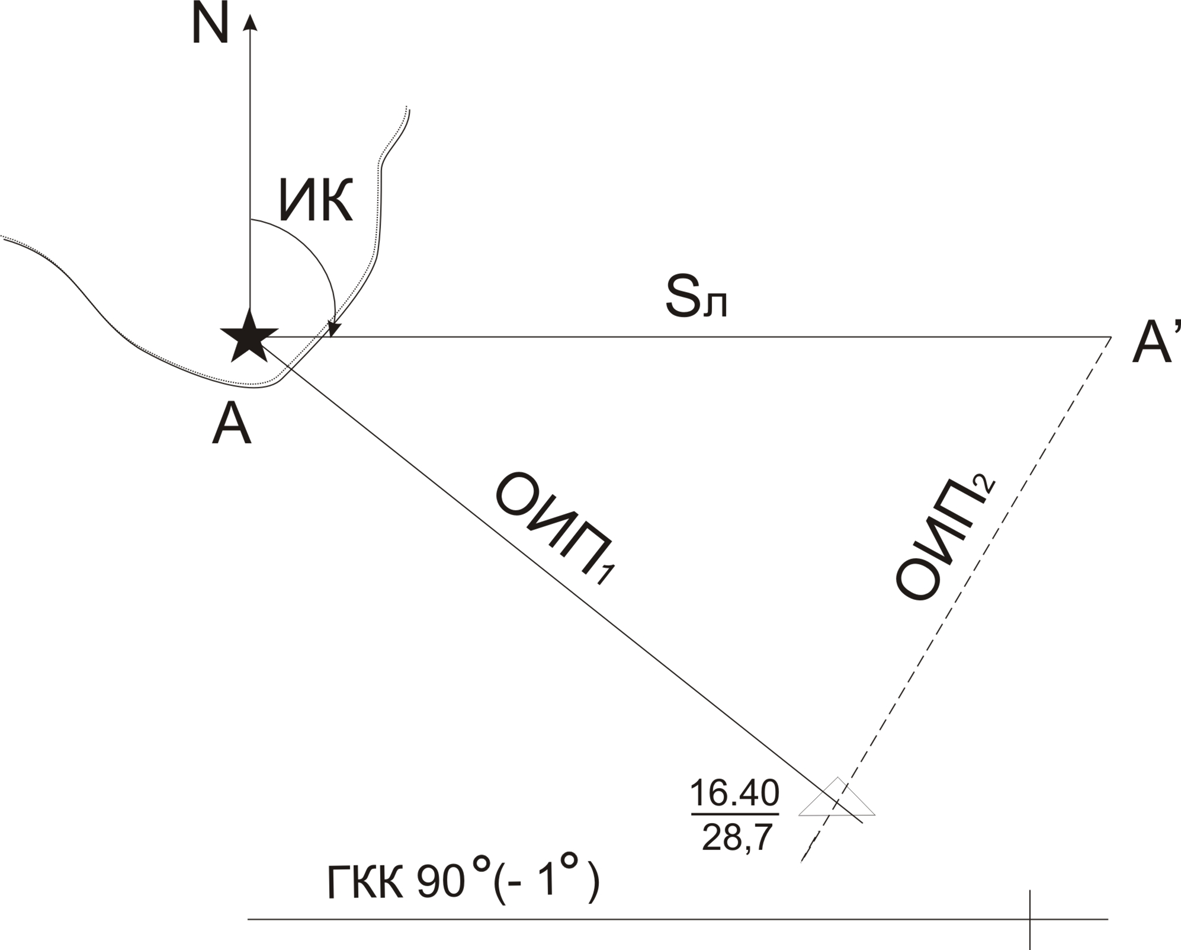
Рис. 1.34.
Обратные исправленные пеленги прокладывают: второй от ориентира А, а первый – от его смещенного положения А. В пересечении линий пеленгов получают счислимо-обсервованное место, у которого, как всегда, надписывают время и отсчет лага.
Если учитывают дрейф и течение, вместо ИК проводят ПУ. Точность оценивают по формуле:
![]() .
.
Подобно описанному получают счислимо-обсервованное место по двум разновременным пеленгам двух ориентиров, одновременное наблюдение которых невозможно.
Б. Определение места по расстояниям.
В практике современного судовождения расстояния до ориентиров измеряют обычно по радиолокатору. При маневрировании в стесненных водах пользуются также антретными (глазомерными) расстояниями, точность которых невелика и резко снижается при увеличении расстояний и ночью.
Если виден от основания или уреза воды ориентир с известной высотой h, то расстояние до него D можно определить по вертикальному углу , измеряемому секстаном (рис. 1.35.).
Как видно из этого рисунка
![]() .
.
Заменяя по малости угла его тангенс значением угла в радианах, а затем переходя к дуговым минутам (), выражая h в метрах, а D – в милях, получаем расчетную формулу
![]()
Здесь - отсчет секстана, исправленный поправкамиi+s.
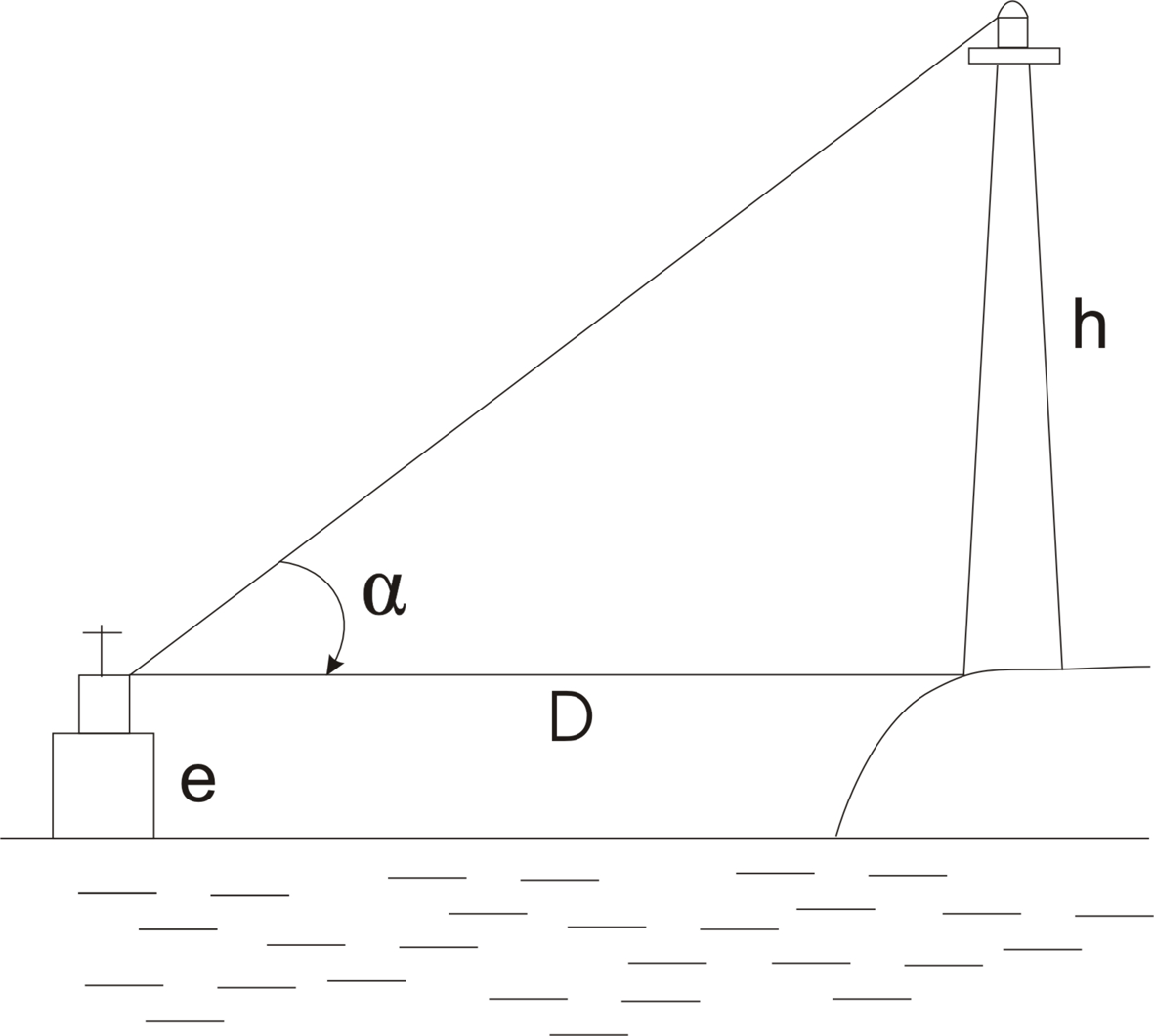
Рис. 1.35.
При D h – e, как обычно и бывает, высотой глаза е можно пренебречь. Хотя при измерении от уреза воды уголбольше, но неучитываемые изменения уровня моря увеличивают погрешность mhи поэтому надежнее измерять вертикальный угол ориентира от его основания, как показано на рис. 1.35.
Если с судна виден удаленный, но высокий ориентир, например, гористый остров, вне дальности действия радиолокатора, то расстояние до такого ориентира также можно определить по вертикальному углу. Этот случай отличается от предыдущего тем, что основание ориентира скрыто за видимым горизонтом. В таком случае вертикальный угол измеряют секстаном между направлениями на горизонт и вершину В ориентира. Иначе говоря, измеряют угловую высотувыступающей из-за горизонта частоh ориентира с высотой h (рис. 1.36.).
Из рисунка видно, что расстояние до ориентира
![]() ,
,
где De и Dh– дальности видимого горизонта с высот е и (h -h).
После преобразования
![]() .
.
П ример:
е=16 м,h-e=2430
м,α=2º08’=128’.
ример:
е=16 м,h-e=2430
м,α=2º08’=128’.
Де=8,4 М, Д=33,3 М.
Рис. 1.36.
Иногда бывает удобным рассчитать дистанцию до плавающего на воде ориентира, если измерен угол х между ватерлинией предмета и видимым горизонтом с помощью навигационного секстана (рис. 1.37.).
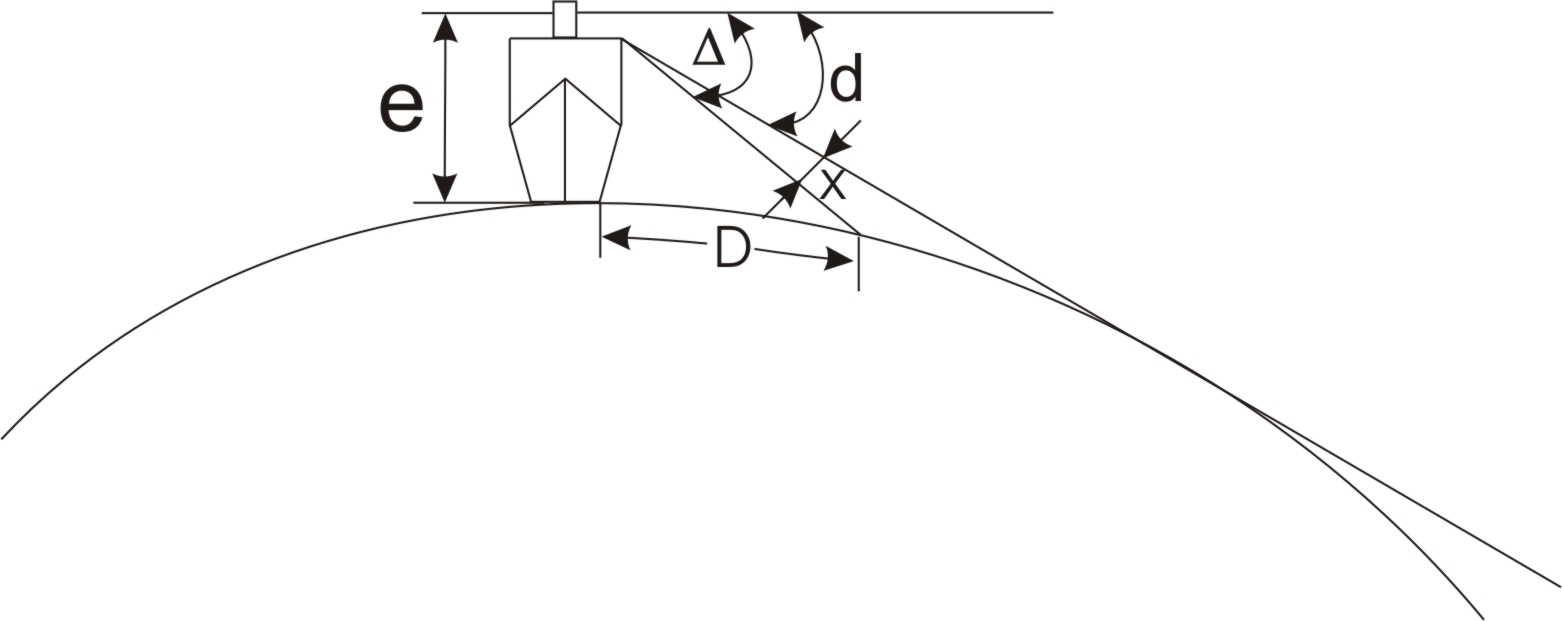
Рис. 1.37.
![]() ,
,![]()
![]()
![]()
Измерив тем или иным способом расстояния двух (трех) береговых предметов, проводят две (три) линии положения в виде окружностей, (рис. 1.38.). Точность определения места судна можно оценить по формуле:
![]() ,
,
где mD– возможная погрешность измерения расстояния;
- угол пересечения линий положения.
Надежность и точность определения места судна по расстояниям значительно повышается при измерении до трех предметов.

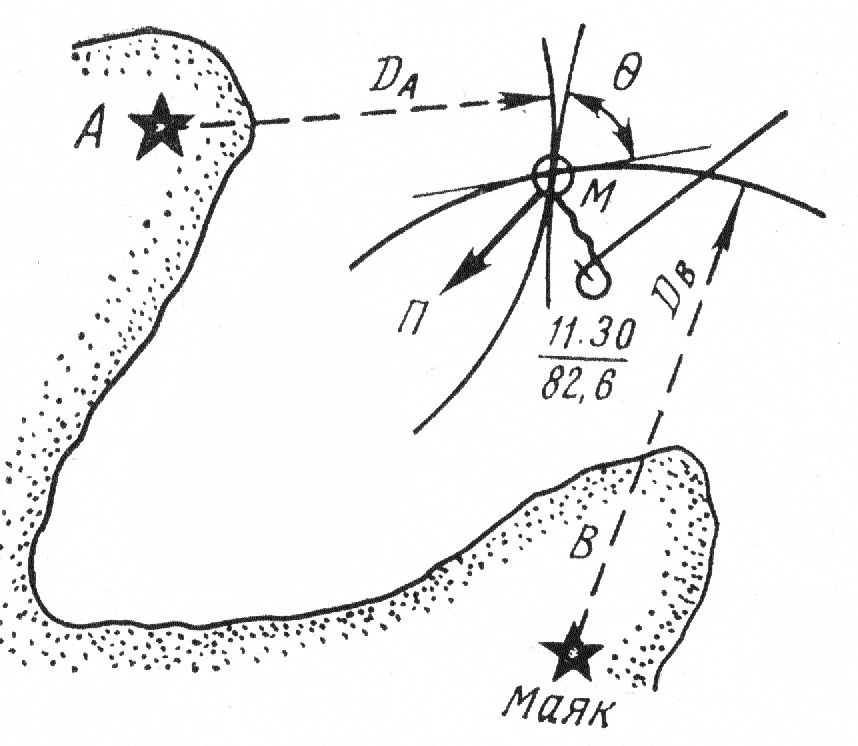
Рис. 1.38. Рис. 1.39.
Если виден только один предмет, то место судна определяют путем измерения направления и расстояния D до него. Для этого прокладывают обратный пеленг наблюдаемого предмета, затем из положения предмета на карте описывают окружность радиусом, равным измеренному расстоянию. Место судна получают в точке пересечения пеленга и окружности (рис. 1.39.). Точность определения места судна оценивают формулой
 .
.
В. Определение места по двум горизонтальным углам
Определение места по двум горизонтальным углам, измеряемым секстаном – самый точный из визуальных способов. Однако, его выполнение требует специальных навыков, особенно на ходу судна. Долгое время этот способ был основным для определения места промера глубин – использовался облегченный промерный секстан с трубой прямого изображения. В практике современного судовождения этот способ применяется крайне редко, например, при стоянке на якоре.
Суть и выполнение определения места
этим способом состоит в следующем.
Секстаном измеряют два горизонтальных
угла и![]() между направлениями на три ориентира
А, В и С (рис. 1.40.).
между направлениями на три ориентира
А, В и С (рис. 1.40.).
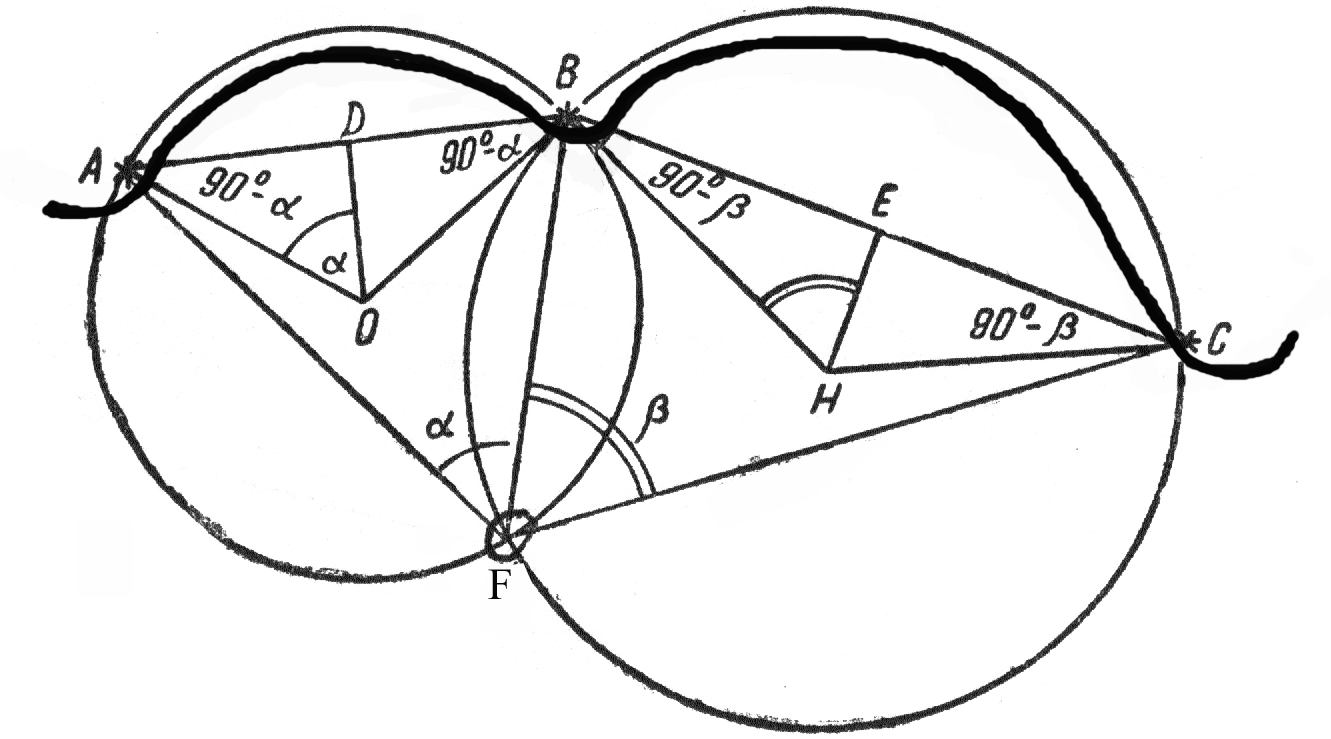
Рис. 1.40.
Углы и- вписанные в окружности (изогоны), проходящие через два ориентира и место судна F.
Измеренные углы истроят из произвольной точки на кальке, которую перемещают на карте, пока стороны этих углов не пройдут через все ориентиры, затем уколом иглы в точку получают обсервованное место F на карте. Вместо кальки раньше использовали протрактор – градуированный лимб с тремя линейками.
При отсутствии кальки и протрактора решение можно получить графическим путем на карте.
С этой целью соединяют прямой линией АВ предметы А и В, после чего делают следующее построение: 1) из точки D, середины прямой АВ, восстанавливают к ней перпендикуляр и 2) при точке А линии АВ строят угол (90-) и сторону этого угла продолжают до пересечения с перпендикуляром, восстановленным из середины прямой АВ (рис. 1.40.).
Точка О будет точкой их пересечения. Из точки О радиусом, равным АО, описывают окружность, которая пройдет через А и через точку В, так как АО=ВО.
Затем точку В соединяют с точкою С и делают построения, аналогичные только что сказанным: 1) из точки Е, середины линии ВС, восстанавливают перпендикуляр и 2) при точке С линии ВС строят угол, равный (90-) и сторону этого угла продолжают до пересечения с перпендикуляром, восстановленным из точки Е. Получают точку Н.
Из этой точки радиусом, равным СН, описывают окружность. Окружность эта пройдет через точку С и через точку В, так как СН = ВН. Эта окружность пересечется в ранее описанной окружностью в двух точках – В и F.
Точка В, как известно, есть место среднего предмета, а точка Fпредставит собою то место, в котором находилось судно в момент измерения углови.
Измерение углов можно производить и по компасу, путем взятия пеленгов трех береговых предметов. Ошибка в обшей поправке компаса на рассчитываемые углы влияния не окажет.
Взяв компасные пеленги, рассчитывают угол между средним и правым предметами и угол между средним и левым предметами; место судна определяется на карте, как было изложено выше.
После определения места судна можно рассчитать общую поправку К и девиацию на тот компасный курс, на котором находилось судно в момент пеленгования.
Для этого на карте из обсервованной точки измеряют три истинные пеленги ИПiи рассчитывают триКi. ПоправкаК рассчитывается как среднее значение:
![]() ;
;![]() ;
;![]() .
.
Определение места судна по пеленгу и горизонтальному углу
Применяется в тех случаях, когда один из двух береговых предметов бывает закрыт каким-либо судовым устройством и его пеленг нельзя измерить, но есть место, где оба предмета хорошо видны: КП2=КП1+α.
Г. Методы опознания места
Опознание места судна по пеленгу и глубине
Во время плавания бывают случаи, когда на счислимое место судна нельзя положиться по разным причинам, например: шли в тумане и долгое время не имели обсервации, есть сомнение в правильности учета течения или дрейфа и пр.
Поэтому, когда откроется берег и на берегу будет виден только один предмет, нанесенный на карту, то место судна можно уточнить сразу: с этой целью берут пеленг этого предмета и одновременно измеряют глубину лотом; замечают время по часам и отсчет по лагу.
Взятый компасный пеленг исправляют общей поправкой на курс и прокладывают его на карте, после чего смотрят, где на нем окажется глубина, которую измерили лотом, и тот грунт, который принес лот.
Точка на проложенном истинном пеленге, в которой окажутся измеренная нами глубина и грунт, будет тем местом, в котором находилось судно в момент пеленгования.
Рассматриваемый способ относится к приближенным способам определения места судна, и следует при первой возможности определить свое место одним из известных точных способов.
Опознание места судна по пеленгу в момент открытия огня
Чтобы определить место судна этим способом, внимательно следят за той частью видимого горизонта, в которой, по предположению, должен открыться огонь, нанесенный на карту; как только он откроется, пеленгуют его и замечают время по часам и отсчет по лагу.
Сняв с карты номинальную дальность видимости огня по изложенному ранее алгоритму определяем реальную дальность До.
От запеленгованного маяка прокладываем ОИП, и на нем от маяка откладываем вычисленную его дальность видимости До. Полученная точка К и будет тем приближенным местом, в котором находилось судно в момент открытия маяка.