

1.2.4. Учет циркуляции
Циркуляцией называют траекторию движения центра масс судна при постоянной кладке руля.
Для учета при прокладке циркуляцию судов малого и среднего тоннажа принимают дугой окружности с радиусом Rц(половина тактического диаметра) и времени t180поворота на 180. Эти характеристики поворотливости определяют из натурных наблюдений обычно при двух кладках руля: полборта - 15и на борт - 35для судна в грузу и порожнем.
Если заданы на карте линии курсов до и после поворота, то построение циркуляции выполняют следующим образом (рис.1.23). Проводят биссектрису МО угла пересечения этих линий и находят на ней точку О, из которой дуга радиуса Rцкасательная к ним. Этим определяются точки начала Н и конца К поворота.
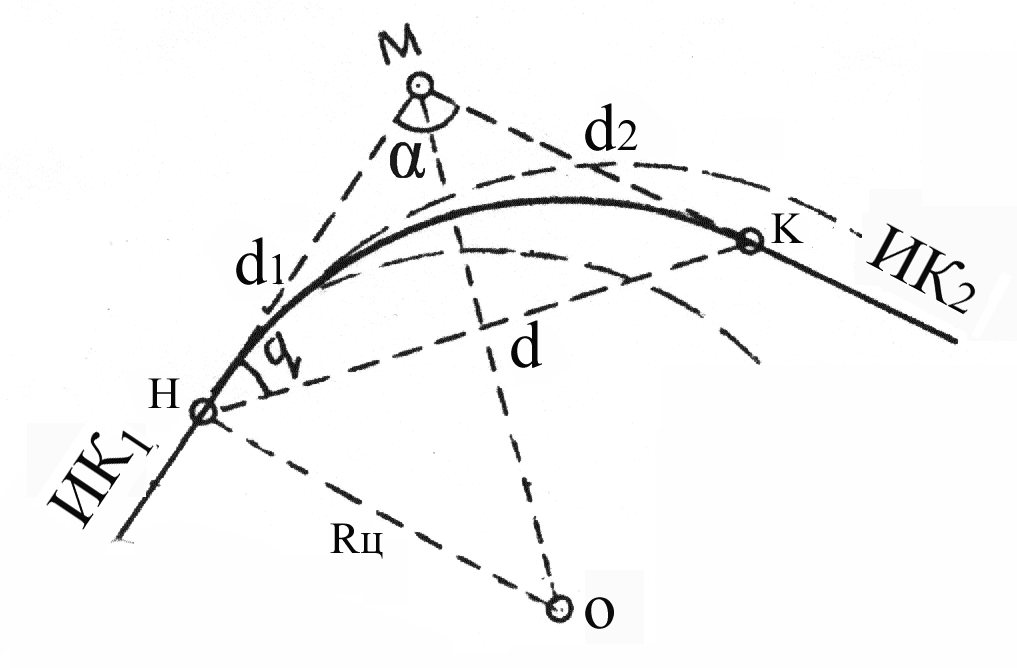
Рис. 1.23.
Время поворота на угол (в градусах) оценивается по формуле
![]() .
.
В других случаях, если задана точка Н начала поворота и направление
линии нового курса, учет циркуляции при прокладке выполняют иначе (см. рис. 1.23.).
Из точки Н восстанавливают перпендикуляр НО к линии прежнего курса, откладывают по нему радиус Rци из полученного центра О проводят дугу этим радиусом. Затем, с помощью транспортира и параллельной линейки проводят линию нового курса касательно к этой дуге, чем определяется конечная точка К.
Те же точки Н и К при заданных Rци угле поворотаможно получить расчетами и построениями отрезков d1и d2или угла q и отрезка d.
Курсовой угол промежуточного плавания
![]() ,
величина промежуточного плавания
,
величина промежуточного плавания![]() .
.
Приход судна в начальную точку Н следует предрассчитать по времени и отсчету лага. Еще важнее наметить секущие пеленг и дистанцию ориентиров прихода в эту точку. Выход на линию нового курса также необходимо контролировать по заранее намеченным пеленгам и дистанциям ориентиров.
При плавании на попутном течении рекомендуется наметить упреждающую точку НТ(рис. 1.24.).
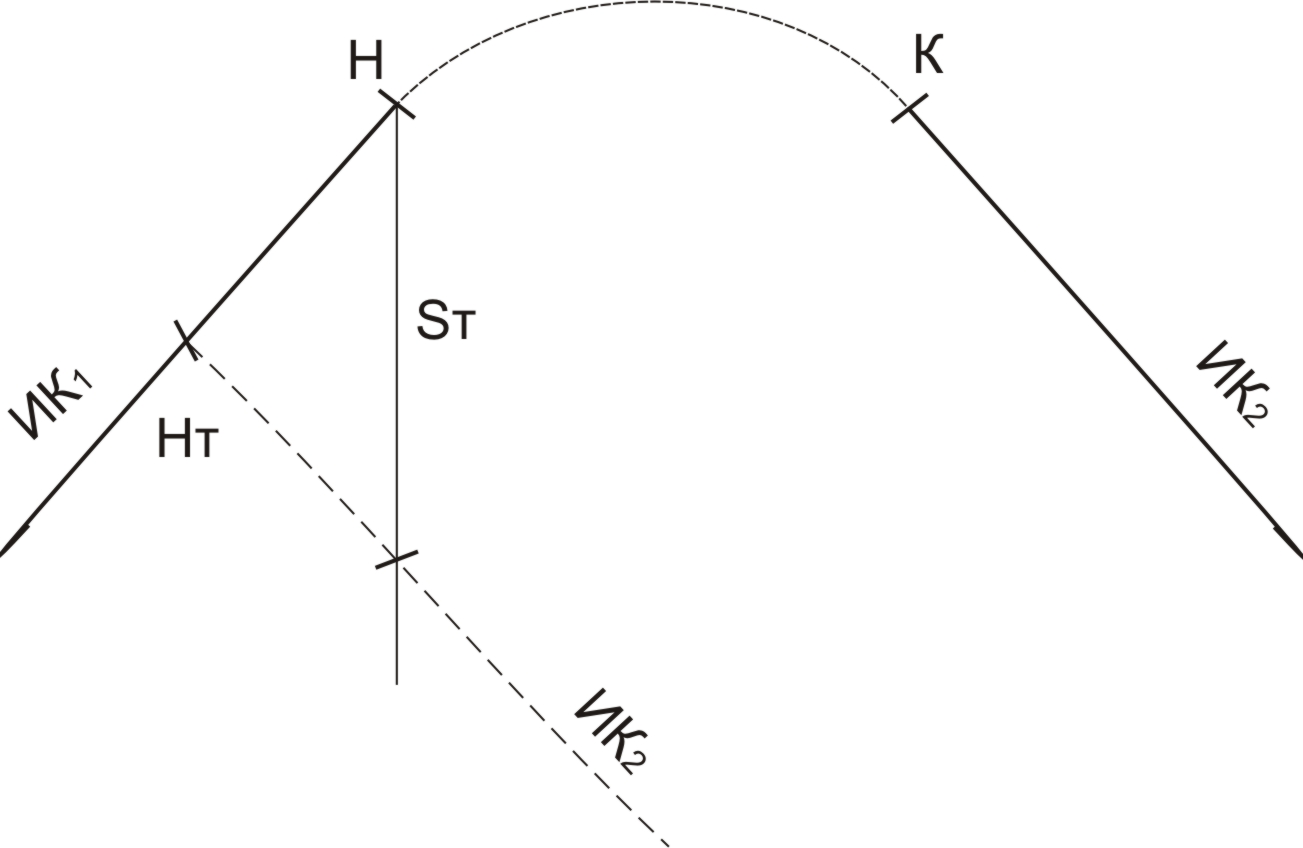
VТ ;
SТ= VТ. t ;
Рис. 1.24.![]()
Направление отрезка SТпрокладывается из точки Н в противоположную течению сторону, остальное очевидно из рисунка.
1.2.5. Аналитическое счисление
Кроме графического в ряде случаев широко применяют аналитическое счисление: счислимое место получают вычислением его координат с,спо координатам начальной точкио,ои их изменениям РШ и РД, образующимся в результате плавания судна из этой точки:
![]() ;
;![]() .
.
Таким образом, задача сводится к вычислению РШ и РД в зависимости от направления и протяженности перемещения судна из начальной точки.
Рассмотрим на плоскости меркаторской проекции прямоугольник, образованный меридианом начальной точки Мо, параллелью искомого счислимого места Мси линией пути – локсодромией длиной S между этими точками (рис. 1.25). Катеты этого треугольника – разность долгот РД и разность меридиональных частей РМЧ – выражены в одинаковых единицах длины – экваториальных милях (единицах карты) и поэтому
![]()
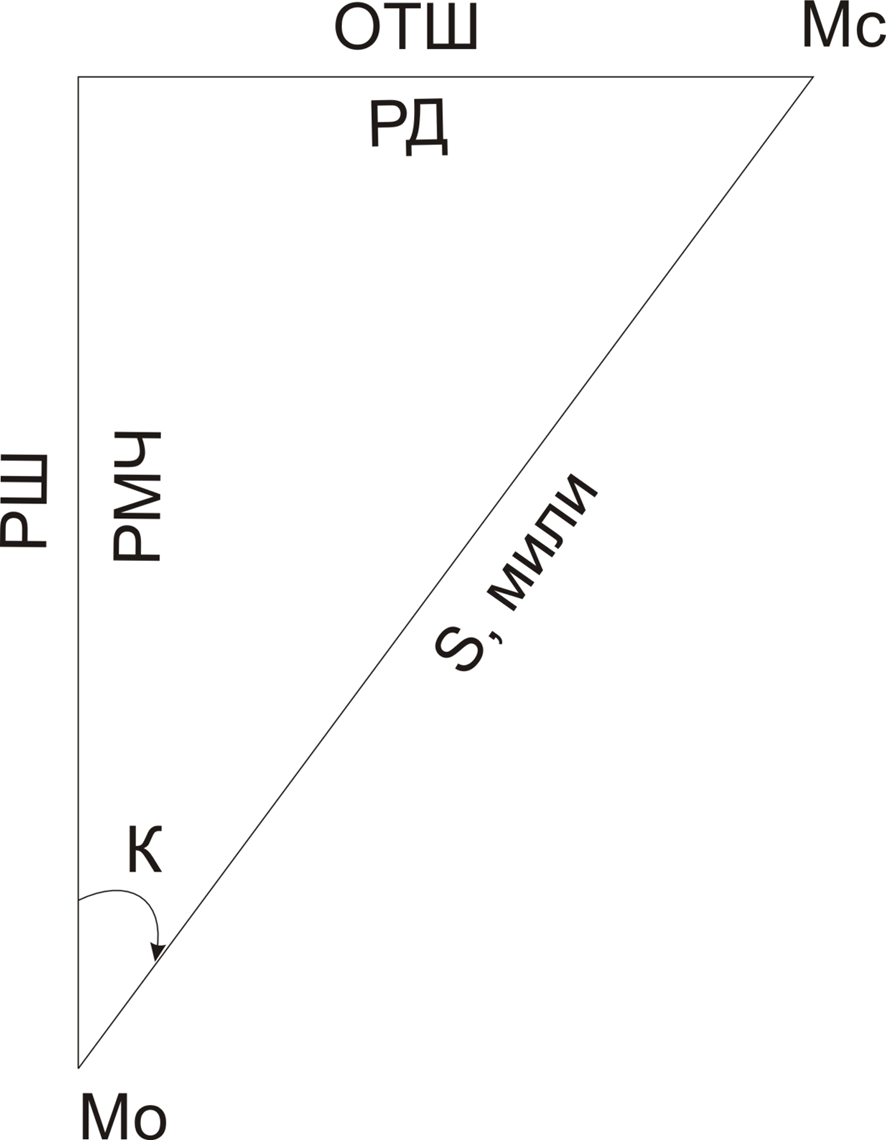
Рис. 1.25.
Обычно применяют приближенные, но более простые формулы.
![]() ;
;![]()
![]()
На практике при плавании по локсодромии разность широт РШ обычно невелика; даже большие переходы в океане осуществляют по участкам локсодромий. Это позволяет решать задачу на сфере с приближенной заменой промежуточной широты пна среднюю
![]()
![]() .
.
Дрейф с углом прости учитывают тем, что в расчетных формулах вместоподставляют ПУ = ИК +. Действие течения за время счисления t учитывают по тем же формулам как дополнительное плавание SТ= VТ,t по направлению Кт, циркуляцию также учитывают как дополнительное плавание d по промежуточному курсу Кпр= ИК 1+q.
Аналитическое счисление разделяют на простое и составное.
Простое счисление - когда курс, дрейф и течение неизменны.
Составное счисление - когда плавание состоит из участков локсодромий протяженностью Siкурсами Ki. В таких случаях расчеты несколько упрощают тем, что найденные, как описано выше, по участкам РШiи ОТШiсуммируют, получая генеральные значения:
![]() ;
;![]() ,
,
а затем один раз Ген ОТШ переводят в Ген РД, после чего по формулам получают счислимые координаты.
При использовании электронных карт, при частом маневрировании, что характерно для ледового плавания, для деятельности промыслового и военного флотов, необходимо автоматически непрерывно вырабатывать счислимые координаты судна и вычерчивать его счислимую траекторию на карте (или дисплее).
В качестве исходных данных для счисления в автопрокладчик непрерывно и автоматически поступают курс от гирокомпаса и скорость от лага. Поправку компаса ГК, коэффициент лага Кл, угол дрейфаи элементы течения КТи VТ, а также координаты начальной точкиоиоустанавливают или изменяют вручную.
Счисление на персональном компьютере ведется для "дискретного времени" на моменты ti=t0+it, где i = 1, 2, …, аt – малый интервал времени, например 2с. На моменты tiавтоматически снимаются показания гирокомпаса и лага и на эти же моменты вычисляются счислимые координатыi,iпо преобразованным формулам аналитического счисления:
![]() ;
;
![]() ,
,
где ,и их приращения вычисляются в минутах, С – коэффициент масштаба и согласования размерностей. Текущая счислимая широтаiвыводится как результат на дисплей, печать и т.п. и одновременно используется для вычисленияiпо второй из этих формул.