

14.2. Структура и состав глобальной навигационной спутниковой системы
Для достижения таких важных качеств ГНСС, как непрерывность и высокая точность измерений, в их составе функционируют три основных сегмента: контроля и управления, космический и потребителя (пользователя).
Сегмент контроля и управления. Это комплекс наземных средств, обеспечивающих непрерывные наблюдения и контроль работы всей системы. Одна из составляющих этого сегмента — равномерно расположенная на поверхности Земли, в том числе и на территории России, космическая геодезическая сеть.
Космический сегмент. В глобальной навигационной спутниковой системе (ГНСС) он включает в себя созвездие навигационных искусственных спутников Земли (НИСЗ), вращающихся вокруг Земли на строго определенных орбитах.
Размеры и форма эллиптической орбиты характеризуются размером ее большой полуоси а и эксцентриситета е. В системе GPS большая полуось и эксцентриситет примерно равны 26560 км и 0,001 соответственно.
Положение плоскости орбиты относительно экваториальной плоскости Земли характеризуют (рис. 5.1): долгота восходящего узла , аргумент перигея и угол i наклона плоскости орбиты к плоскости экватора. Например, для системы GPS: = 80°, i = 55°.
Положение навигационного искусственного спутника земли на орбите описывает радиус-вектор (рис. 1), который определяют по формуле
 ,
,
где: P=a(1 – e2); e – эксцентриситет орбиты; - истинная аномалия (выражается в градусной мере).
Составляющие радиуса-вектора (его пространственные инерциальные геоцентрические прямоугольные координаты XC, YC, ZC) имеют следующий вид:
XC = (coscosU - sinsinUcosi);
YC = (sincosU + cossinUcosi);
ZC = sinUsini,

Где U – аргумент широты, U = +u.
Рисунок 1. Основные элементы орбиты НИСЗ
При невозмущенном движении НИСЗ параметры , i, , , e постоянны и не меняются при движении спутника по орбите. При этом истинная аномалия характеризует положение спутника на орбите в определенный момент времени, называемый «эпохой».
В ГНСС GPS навигационные искусственные спутники Земли размещены на шести орбитальных плоскостях по четыре НИСЗ в каждой. Высота орбит 20145 км (рис. 2). Восходящие узлы орбит в ГНСС GPS расположены равномерно по экватору и отстоят друг от друга по долготе на 60° на восток.
В глобальной навигационной спутниковой системе ГЛОНАСС на трех орбитальных плоскостях должны вращаться равномерно расположенные на каждой орбите 24 искусственных спутника Земли (рис. 2). Тип орбиты — круговой. Высота орбиты 19100 км, наклонение орбиты 64,8°. Период обращения — примерно 12 ч.
При невозмущенном движении НИСЗ параметры орбиты в каждый фиксированный момент времени постоянны и не меняются при движении спутника по орбите. Пространственное положение НИСЗ характеризуют его «бортовые эфемериды», включающие в себя пространственные прямоугольные координаты НИСЗ (в системе координат WGS-84 для GPS и в системе ПЗ-90 для ГЛОНАСС) на определенный момент времени tk (на определенную эпоху).
Бортовые эфемериды вычисляются в результате обработки измерений, выполняемых сегментом контроля и управления. По результатам соответствующих измерений бортовые эфемериды загружаются на НИСЗ несколько раз в сутки. При этом влияние погрешностей эфемерид (неточность определения параметров орбит, непрогнозируемые смещения НИСЗ и др.) на точность абсолютного положения определяемых пунктов не превышает для системы ГЛОНАСС — 9,2 м, системы GPS — 1 м.
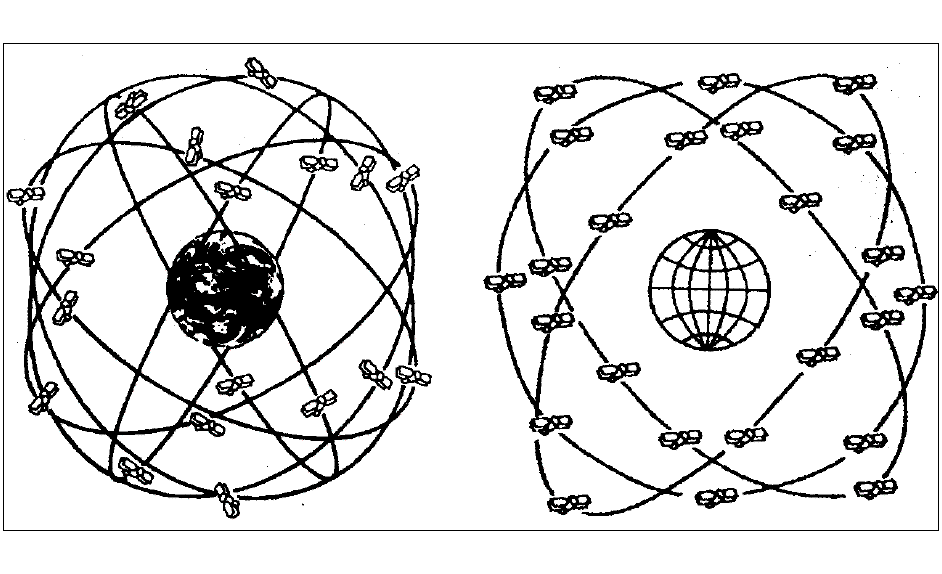
Рисунок 2. Созвездия НИСЗ систем GPS и ГЛОНАСС