

2.2. Жесткость
Рассмотрим свободные колебания системы (см. рис. 2.1,а), считая, что сопротивления движению отсутствуют. Переместим массу из положения покоя О в начальное положение О1; пусть ОО1 = х0. Под действием сил упругости масса А начнет двигаться от О1 к О. Запас потенциальной энергии, полученной на пути х0 (О до О1), зависит от длины пути и от жесткости пружины. Жесткостью называют силу, которую нужно приложить к пружине, чтобы растянуть или сжать ее на 1 м. Величину с изменяют в н/м, и сила P = cx н.
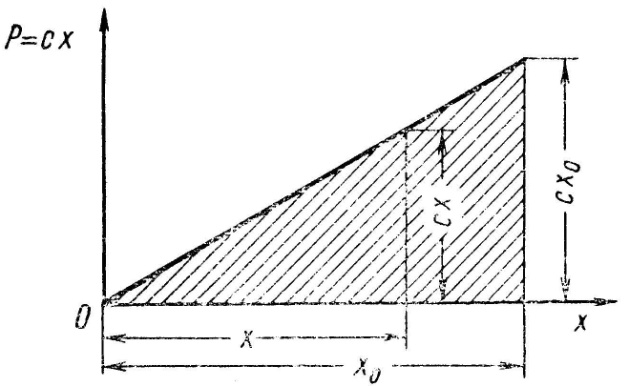
Рис. 2.3. К определению потенциальной энергии системы
Если
сила пружины пропорциональна перемещению
ее конца (характеристика ее – прямая
линия), то запас потенциальной энергии
измеряется площадью заштрихованного
треугольника на рис. 2.3,
 ,
а в крайнем положении
,
а в крайнем положении
 .
Этот запас при колебаниях (без трения)
остается неизменным и только меняет
форму: потенциальная энергия Wp
переходит в кинетическую Wк
и обратно. В любой момент
.
Этот запас при колебаниях (без трения)
остается неизменным и только меняет
форму: потенциальная энергия Wp
переходит в кинетическую Wк
и обратно. В любой момент
Wр + Wк = W0. (2.1)
Уравнение (2.1) справедливо в любом случае, какова бы ни была характеристика пружины. В рассматриваемом случае, для витой цилиндрической стальной пружины, характеристика пружины – прямая линия. На практике часто применяют пружинящие элементы с другими характеристиками. Можно, например, стремясь ограничить величину перемещений при случайных очень больших толчках, поставить, кроме основной пружины, короткую дополнительную, как схематически показано на рис. 2.4, а. Тогда при перемещении ОО1 жесткость будет равна жесткости внутренней пружины с1, а далее, на пути от О1 к О2, суммарные жесткости обеих пружин с1 + с2. При обратном движении сперва жесткость равна с1 + с2, а начиная от точки О1 до О, будет действовать сначала сжатая, а затем (от О по направлению к О3) уже растянутая внутренняя пружина, и жесткость снова равна с1. Характеристика пружины этого устройства показана на рис. 2.4, б.
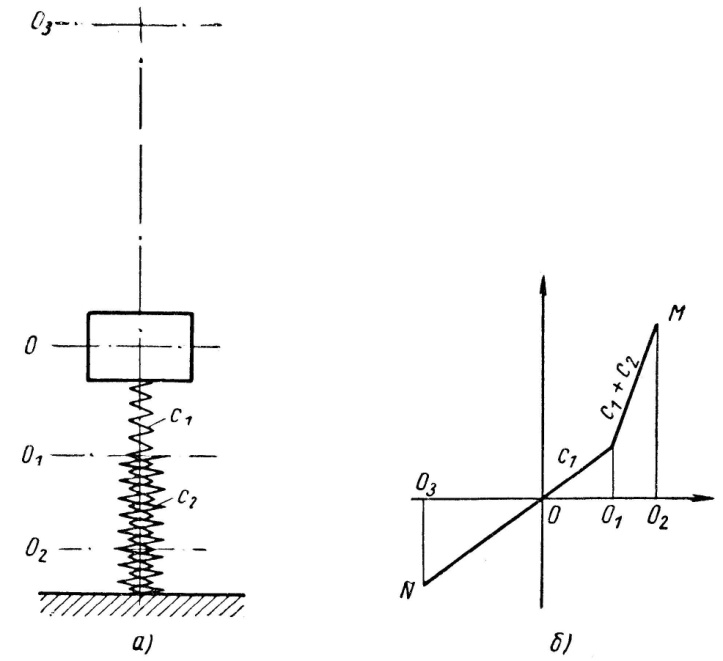
Рис. 2.4. Нелинейная система
Здесь уже нет пропорциональности между силой и перемещением, но по-прежнему начальный запас потенциальной энергии W0, равной площади фигуры ОО1О2МО, будет равен запасу потенциальной энергии в другом крайнем положении, выражаемому площадью треугольника ONO3. Ясно, что при этом путь ОО3 будет больше, чем ОО2 – масса подпрыгнет вверх от среднего положения на большее расстояние, чем опустилась вниз. Возможны различные непрямолинейные характеристики пружинных устройств, обеспечивающие требуемые условия. В ряде случаев упругие элементы делают не из стали, а целиком или частично из резины. Резиновые элементы при сжатии по мере увеличения деформации становятся более жесткими, т.е. характеристика их не прямая линия, а плавная кривая.
Приводимый ниже вывод закона колебательного движения системы с одной степенью свободы относится к системе с прямолинейной характеристикой пружины (см. рис. 2.3). Движение в этом случае описывается линейным дифференциальным уравнением, т.е. содержащим только первые степени искомой функции и ее производных. Если же жесткость с сама зависит от х (рис. 2.4, а), т.е. с = f(х), то уравнение делается нелинейным. Колебания, описываемые такими уравнениями, тоже называются нелинейными. В большинстве случаев, при точном рассмотрении, колебания оказываются нелинейными, и только для упрощения задачи их рассматривают приближенно как линейные, что вполне оправдывается в ряде практических применений теории достаточной точностью результатов.