

7.2. Уравновешивание вращающегося тела
Допустим, что тело А (рис. 7.2) неуравновешенно только статически, т.е. центр масс этого тела S смещен на расстояние rS от оси вращения, но ось вращения является одной из главных осей инерции, т.е. .
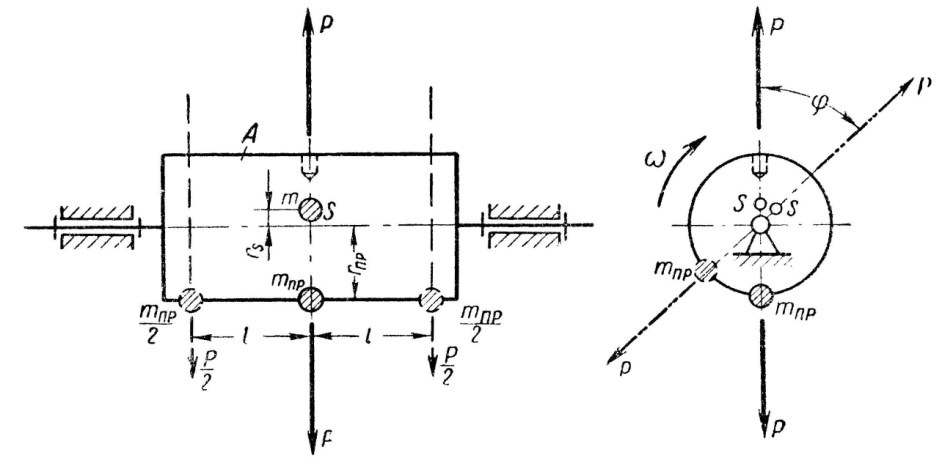
Рис. 7.2. Статическое уравновешивание вращающегося тела при помощи
одного или двух равных противовесов
В простейшем случае противовес помещают на линии, проходящей через центр масс S, по другую сторону от оси вращения на расстоянии rпр от оси вращения. Массу противовеса определяют из условия (см. формулу (7.7))
mпрrпр = mrS,
откуда
 .
(7.11)
.
(7.11)
Из этой формулы видно, что радиус, на котором необходимо располагать противовес, следует выбирать по возможности большим, так как масса противовеса при этом потребуется малая. Если масса противовеса подобрана по формуле (7.11), то сила инерции противовеса Р окажется равной и противоположной результирующей силе инерции тела и поэтому общая сила инерции будет равна нулю и на опоры тела и фундамент передаваться не будет. Можно также сказать, что после постановки противовеса центр масс тела S сместится на ось вращения. Естественно, что и при повороте тела на угол φ силы инерции противовеса и тела (рис. 7.2, справа) по-прежнему уравновешивают друг друга.
Постановку противовеса можно заменить удалением (например, путем высверливания или спиливания) некоторой массы на той стороне, в которую смещен центр масс S, как это показано на рис. 7.2 пунктиром. Практически, если это только возможно, чаще всего применяют именно такой способ уравновешивания. Величина удаляемой массы по-прежнему может быть определена по формуле (7.11). Если радиусу rпр приписать при этом ещё знак минус, то этот знак покажет, что масса mпр должна быть удалена, а не прибавлена.
В
некоторых случаях поместить массу mпр
точно на линии, проходящей через центр
масс
S,
невозможно. В этом случае вместо одного
противовеса с массой mпр
можно на тело поставить два противовеса,
каждый с массой
 mпр.
Для того, чтобы при этом не нарушалась
динамическая неуравновешенность тела,
необходимо обязательно поместить оба
противовеса на одинаковых расстояниях
l
от центра масс S,
как показано на рис. 7.2 пунктиром.
Действительно, при таком расположении
противовесов моменты, создаваемые
силами инерции
Р
обоих противовесов относительно центра
масс S,
равные
Р l,
взаимно погасятся. Можно также сказать,
что центробежные моменты инерции обоих
противовесов, равные
mпрlrпр,
будут противоположны по знаку (разные
знаки у l)
и поэтому в сумме дадут ноль.
mпр.
Для того, чтобы при этом не нарушалась
динамическая неуравновешенность тела,
необходимо обязательно поместить оба
противовеса на одинаковых расстояниях
l
от центра масс S,
как показано на рис. 7.2 пунктиром.
Действительно, при таком расположении
противовесов моменты, создаваемые
силами инерции
Р
обоих противовесов относительно центра
масс S,
равные
Р l,
взаимно погасятся. Можно также сказать,
что центробежные моменты инерции обоих
противовесов, равные
mпрlrпр,
будут противоположны по знаку (разные
знаки у l)
и поэтому в сумме дадут ноль.
Если отказаться от условия равенства масс обоих противовесов, то статическое уравновешивание можно произвести без нарушения динамической уравновешенности при помощи двух противовесов, расположенных в двух произвольных, но заранее выбранных плоскостях I и II (рис. 7.3).
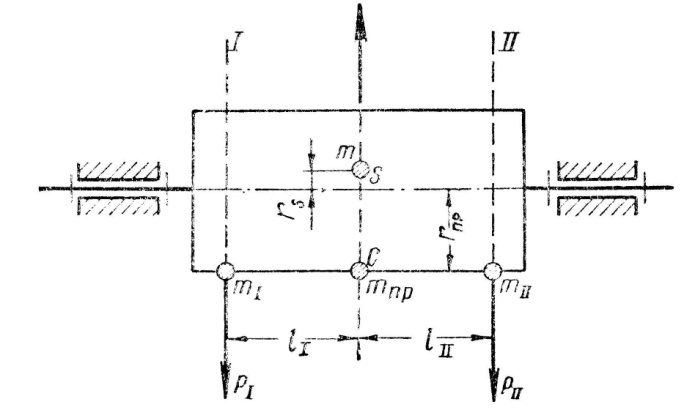
Рис. 7.3. Статическое уравновешивание вращающегося тела при помощи двух противовесов,
расположенных в произвольных плоскостях I и II
Плоскости, выбираемые для расположения двух противовесов, обычно называются плоскостями исправления. Массы противовесов mI и mII можно определить в соответствии с формулами (7.7) и (7.8) из уравнений

и
 ,
,
откуда
 и
и
 .
(7.12)
.
(7.12)
Сложив массы этих противовесов, получим с учетом формулы (7.11)
 ,
,
а из их отношений найдем
 .
.
Из приведенных формул видно, что один противовес с массой mпр всегда может быть заменен двумя противовесами с массами mI и mII, подобранными так, чтобы их суммарная масса равнялась массе m, а их общий центр масс (точка С) совпадал с положением противовеса mпр. Справедливо, очевидно, и обратное положение, позволяющее два противовеса mI и mII заменять одним противовесом с массой, равной их сумме, и расположенным в общем центре масс (в точке С). Подчеркнем, что высказанные положения справедливы только для случая, когда массы mI и mII расположены на линии, параллельной оси вращения тела.
Если подсчитать силы инерции РI и РII, развиваемые противовесами mI и mII, то легко убедиться, что в сумме они уравновешивают результирующую силу инерции тела Р, а моменты этих сил относительно центра масс S взаимно погашаются.
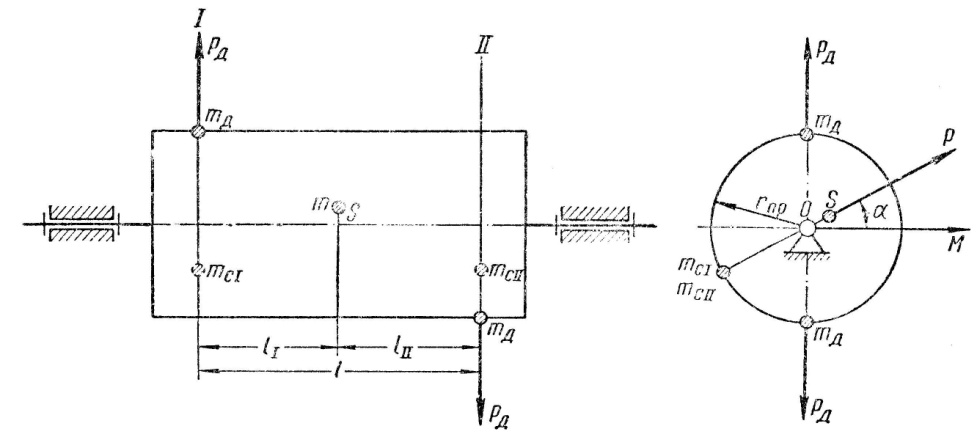
Рис. 7.4. Полное уравновешивание вращающегося тела при помощи четырех противовесов,
расположенных в произвольных плоскостях I и II
Рассмотрим теперь случай, когда уравновешивается полностью неуравновешенное тело (рис. 7.4). Выберем удобные для постановки противовесов плоскости исправления I и II. Применяя изложенный прием, найдем массы противовесов mCI и mCII, необходимые для статического уравновешивания. Прикрепив эти массы к телу, получим статически уравновешенное тело, у которого центр масс S лежит на оси вращения О (на рис. 7.4 показано положение центра масс S до статического уравновешивания). Если тело не уравновешено динамически, то его центробежный момент инерции Jlr, значит, и результирующий момент сил инерции М не равны нулю. Предположим, что вектор момента М составляет с вектором результирующей силы инерции Р (до статического уравновешивания) угол α, и расположим тело так, чтобы на правой проекции рис. 7.4 вектор момента М и, значит, вектор Jlr были направлены по горизонтальной линии, а на левой – прямо на наблюдателя. Динамическую неуравновешенность можно устранить одним противовесом mд, подобрав его так, чтобы центробежный момент инерции этого противовеса mДlIrпр был равен Jlr и противоположен ему по знаку.
Тогда и момент силы инерции противовеса будет противоположен результирующему моменту М, и суммарный момент окажется равным нулю.
Однако при такой постановке противовеса для динамического уравновешивания снова нарушится статическая уравновешенность. Поэтому динамическую неуравновешенность устраняют при помощи двух одинаковых противовесов с массами mД, расположенных в плоскостях I и II по разные стороны от оси вращения тела. При такой постановке противовесов статическая уравновешенность не нарушается, так как силы инерции этих противовесов РД взаимно погашаются.
Массы противовесов mД определяются из условия
mДlIrпр + mДlIIrпр = Jlr,
откуда
 ,
(7.13)
,
(7.13)
где l – расстояние между плоскостями исправления.
Поставить противовесы mД надо так, чтобы момент сил инерции этих противовесов уравновешивал результирующий момент М.
Теперь как в плоскости I, так и в плоскости II оказалось по два противовеса (рис. 7.5): противовесы c массами mCI и mД. Однако при этом радиус противовеса rпр окажется равным r΄пр. При желании поставить противовес на прежнем радиусе rпр достаточно найти новую массу из формулы
 .
(7.14)
.
(7.14)
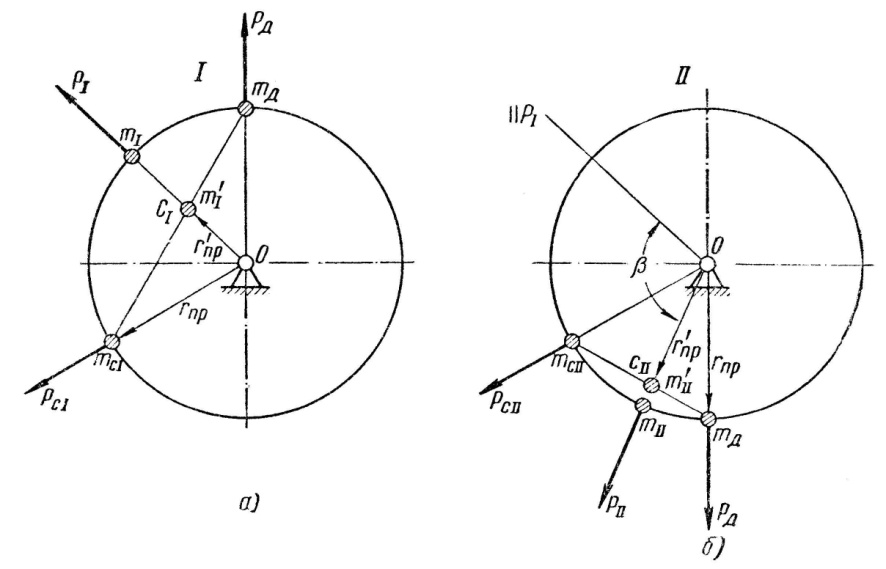
Рис. 7.5. Замена двух противовесов в плоскости I и двух противовесов в плоскости II
одним противовесом в каждой плоскости
Аналогичным путем можно определить массу mII окончательного противовеса в плоскости II. Естественно, что противовесы mI и mII окажутся расположенными под некоторым углом β друг к другу.
Легко также видеть, что сила инерции РI противовеса mI будет в точности равна векторной сумме сил инерции РCI и РД противовесов mСI и mД. Естественно, что и момент этой силы М1 будет равным сумме моментов МCI и МД.
Из всего изложенного видно, что полное уравновешивание вращающегося тела может быть достигнуто при помощи двух противовесов mI и mII, расположенных в произвольно выбранных плоскостях I и II и на произвольных расстояниях от оси вращения rпрI и rпрII.
Для статического уравновешивания достаточно поставить один противовес с массой mпр. Расположить такой противовес, если не обращать внимание на изменение динамической неуравновешенности, можно в любой плоскости и на любом расстоянии от оси вращения.
Для динамического уравновешивания, если не обращать внимание на изменение статической неуравновешенности, также достаточно одного противовеса с массой mпр, расположенного в любой плоскости (кроме плоскости, проходящей через центр масс тела S) и на любом расстоянии от оси вращения.
Многие вращающиеся тела имеют такие формы, при которых центробежный момент инерции Jlr оказывается величиной малой. При этом, естественно, и результирующий момент всех сил инерции также будет небольшим. Такие тела достаточно уравновешивать только статически. Малые центробежные моменты инерции Jlr получаются у тех тел, у которых общая длина l значительно меньше их диаметра. При малой общей длине l все отдельные li также будут малыми и, значит, мал будет и центробежный момент инерции Jlr. Такими телами являются маховики, шкивы, зубчатые колеса и т.д. Однако в некоторых случаях наблюдаются явления, указывающие на недостаточность только статического уравновешивания.
Из того факта, что вращающееся тело может быть полностью уравновешено при помощи двух противовесов, расположенных в двух произвольных плоскостях, можно также сделать вывод, что и полная неуравновешенность любого вращающегося тела может быть представлена двумя неуравновешенными массами, расположенными в двух произвольных плоскостях. При таком подходе всякое неуравновешенное тело можно считать состоящим из основной уравновешенной части (например, цилиндра), к которой в двух произвольных плоскостях прикреплены две неуравновешенные массы m1 и m2, причем величины этих масс и их расположение на теле цилиндра должны быть точно указаны. Мерой полной неуравновешенности тела служат в этом случае величины статических дисбалансов в обеих плоскостях
∆сI = G1r1 [сн·см]
и
∆с2 = G2r2 [сн·см],
где G1 и G2 – веса неуравновешенных масс, сн.
Контрольные вопросы
Как определяется полный момент сил инерции вращающегося тела?
Определить условия, при которых вращающееся тело считается полностью уравновешенным.
Что является мерой статического и динамического дисбаланса вращающегося тела?
Как осуществляется статическое уравновешивание вращающегося тела противовесами в произвольных плоскостях?
Как осуществляется полное уравновешивание вращающегося тела с помощью двух противовесов?