

2. Уравнения движения механизмов
Вибрация периодического и случайного характера, источниками которой являются силовые установки и узлы машин, воспринимаются кабиной или поверхностью машины как структурный шум.
Вибрация – сложный колебательный процесс, происходящий в контролируемых точках механических систем, длительность которого превышает время затухания переходного процесса.
По природе явлений, имеющих место в колебательных системах, различают:
свободные колебания, совершаемые системой, выведенной из состояния устойчивого равновесия, например, однократным ударным воздействием;
вынужденные колебания, возникающие в системе в результате действия внешних переменных (возмущающих) сил;
параметрические колебания, вызванные периодическими изменениями параметров системы (жесткости, массы);
автоколебания (самовозбуждающие колебания), возникающие и поддерживающиеся от источника энергии неколебательной природы, когда этот источник включен в замкнутую нелинейную систему.
Вызванные указанными процессами вибрации могут быть низкочастотными, и мы можем ощущать их пальцами или просто видеть, могут происходить на звуковых частотах, и тогда мы определяем и ощущаем их по излучаемому звуку. Физические основы вибраций как на низких, так и на высоких частотах одинаковы.
Кинематические особенности вибрационных систем (с конечным числом степеней свободы) характеризуют основные параметры:
смещение
 – мгновенное значение обобщенной
координаты относительно положения
равновесия, м;
– мгновенное значение обобщенной
координаты относительно положения
равновесия, м;амплитуда А = 0,5
 – максимальное отклонение от положения
равновесия или половина общего размаха
колебаний, м;
– максимальное отклонение от положения
равновесия или половина общего размаха
колебаний, м;
 – общий размах колебаний – интервал
изменения колеблющейся величины х за
период или условный период, м;
– общий размах колебаний – интервал
изменения колеблющейся величины х за
период или условный период, м;период
 – длительность полного колебания, с;
– длительность полного колебания, с;частота
 – число колебаний в единицу времени,
Гц;
– число колебаний в единицу времени,
Гц;круговая частота
 – число колебаний за 2π единиц времени,
рад/с;
– число колебаний за 2π единиц времени,
рад/с;фазовый угол
 – угол, характеризующий мгновенное
состояние вибрирующей системы при
заданных смещениях и времени, рад;
– угол, характеризующий мгновенное
состояние вибрирующей системы при
заданных смещениях и времени, рад;начальный фазовый угол φ0 – значение фазы при t = 0, рад;
время t – отсчитывается от момента начала колебаний.
Простейшим
и наиболее важным видом периодических
колебаний являются гармонические
 .
.
2.1. Число степеней свободы
Если положение движущего тела можно выразить одной координатой, то тело имеет одну степень свободы. Простейшие колебательные системы с одной степенью свободы показаны на рис. 2.1. Перемещение массы выражается ее отклонением х от положения покоя
(рис. 2.1, а), когда пружина не сжата и не растянута, углом поворота диска φ от среднего положения, при котором вал не закручен (рис. 2.1, б) или стрелой прогиба f от среднего положения, при котором стержень не изогнут (рис. 2.1, в).
Во всех этих случаях мы просто рассматриваем то действительное движение, которое совершает масса, предполагая, что все остальные возможные движения не возбуждаются, хотя для того, чтобы эти системы были в строгом смысле системами с одной степенью свободы, нужны были бы связи, ограничивающие перемещения. Действительно, массу, показанную на рис. 2.1, а, можно было бы оттянуть в бок, изогнув ось пружины, тогда колебания совершались бы в направлении, перпендикулярном х (вторая степень свободы). Вал (рис. 2.1, б) можно не только закрутить, но и изогнуть, а стержень (рис. 2.1, в), кроме изгиба, можно закрутить. В действительных системах очень часто можно не обращать внимания на такие дополнительные степени свободы, так как отсутствуют силы, вызывающие боковые движения, добавочные кручения и т.п. Но в ряде случаев приходится принимать во внимание большое число степеней свободы. Простым примером практической задачи, в которой нужно рассматривать несколько степеней свободы, служит расчет колебаний установки на упругой подвеске.
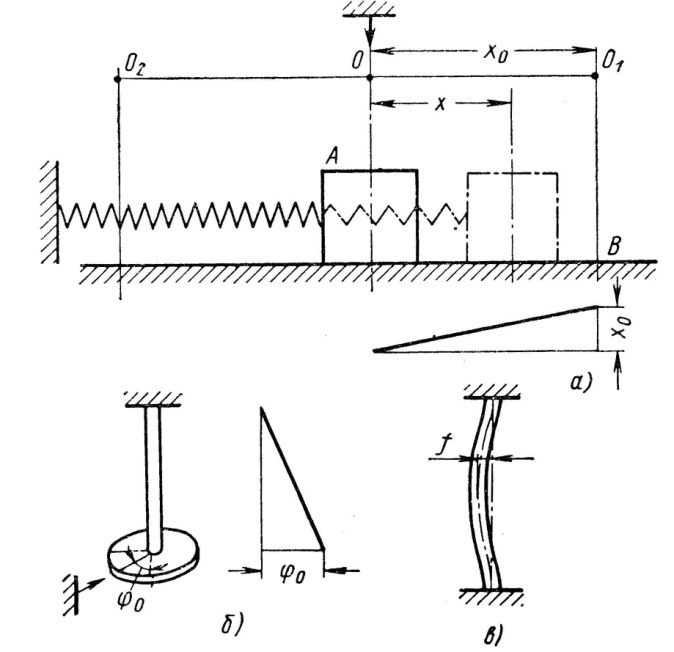
Рис. 2.1. Системы с одной степенью свободы
Двигатель (рис. 2.2) может перемещаться вертикально, вдоль и поперек оси вала и, кроме того, качаться относительно оси Z, рыскать в горизонтальной плоскости вокруг оси Х или испытывать боковую качку вокруг оси Y, т.е. для описания его движения требуется шесть координат (вдоль осей X, Y, Z и вокруг них на некоторые углы в плоскостях дуг φ1, φ2, φ3); следовательно, упруго подвешенная установка обладает шестью степенями свободы.
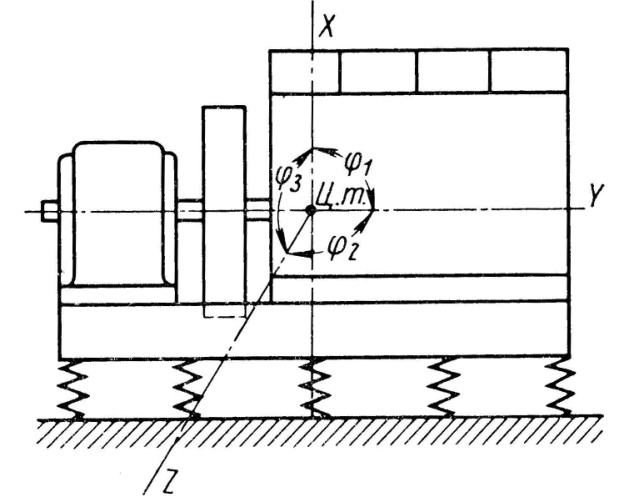
Рис. 2.2. Система с шестью степенями свободы
Изучение колебаний удобно начинать с простейшей системы, с одной степенью свободы. Масса, показанная на рис. 2.1, а, если оттянуть ее вправо и отпустить, будет колебаться относительно средней точки О. Растягивая пружину, мы вызываем в ней восстанавливающую силу, стремящуюся вернуть массу в среднее положение. Если для простоты пренебречь трением массы А при скольжении по пластине В, внутренним трением в пружине и сопротивлением воздуха, то к моменту прихода в точку О запас работы сил упругости пружины полностью израсходуется, перейдя в кинетическую энергию, которой при отсутствии сопротивлений будет достаточно, чтобы сжать пружину на такую же величину, на какую она была растянута. Масса А начнет затем двигаться вправо, и колебания, теоретически, будут продолжаться вечно.
Обычно в механических задачах восстанавливающими силами являются силы упругости, но это не всегда так: при колебаниях маятника, например, восстанавливающей силой служит сила тяжести.
Если на грани массы А укрепить вертикально карандаш и протянуть под колеблющейся массой по пластине В полоску бумаги, двигая ее с постоянной скоростью поперек направления колебаний (т.е. перпендикулярно к плоскости чертежа), то карандаш вычертит синусоиду. Каждому полному колебанию, т.е. перемещению массы А из начального положения справа в крайнее положение слева и назад в начальную точку, соответствует одна синусоида. Такое движение называют гармоническим.