

6.2. Динамический поглотитель колебаний
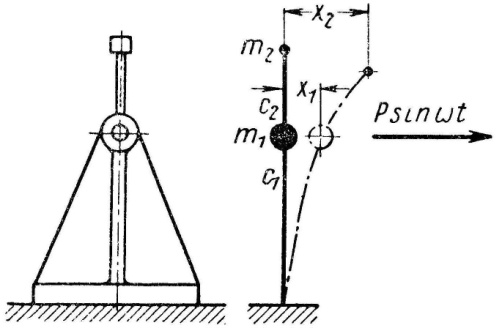
Рассмотрим колебания подшипника роторной машины, возбуждаемые неуравновешенностью ротора. Эти колебания передаются фундаменту машины и могут вызывать неприятное дрожание пола или колебания пульта управления, отражающиеся на приборах. Выделим для рассмотрения систему из двух масс (рис. 6.3, а): первая масса m1 – подшипник, изгибная жесткость которого с1, и вторая масса m2, специально укрепленная на консольной балке с изгибной жесткостью с2. Колебания ротора мы здесь не рассматриваем, считая просто, что к подшипнику приложена переменная (гармоническая) сила давления в горизонтальной плоскости от вращающейся неуравновешенной массы ротора. Схематизированная система показана на рис. 6.3, б.
а) б)
Рис. 6.3. Динамический поглотитель колебаний
Уравнения движения (6.6), где ω – частота возбуждения. Нужно учесть, что на подшипник m1, кроме внешней силы, действуют силы от изгиба его основания с1 балки с2:
 (6.6)
(6.6)
Положим (для отыскания частного решения), что

Тогда
после двукратного дифференцирования
и подстановки
 ,
х1
и х2
в уравнении (6.6) получим следующую систему
уравнений (все члены разделены на sin
ωt):
,
х1
и х2
в уравнении (6.6) получим следующую систему
уравнений (все члены разделены на sin
ωt):
 (6.7)
(6.7)
Из уравнений (6.7) можно найти амплитуды вынужденных колебаний х1 и х2 (индекс «0» опускаем). Это частное решение, но оно важно, так как рассматриваются установившиеся вынужденные колебания.
Для последующих рассуждений удобно переписать уравнение (6.7), введя новые обозначенния:
 – деформация
стойки подшипника (основной системы);
– деформация
стойки подшипника (основной системы);
 – собственная
частота системы консольная балка –
масса m2
(добавочная система);
– собственная
частота системы консольная балка –
масса m2
(добавочная система);
 – собственная
частота основной системы.
– собственная
частота основной системы.
Подставляя х1, найденное из второго уравнения (6.7), в первое и деля все члены его на с1, найдем, вводя новые обозначения,
 ,
(6.8)
,
(6.8)
а затем
 .
(6.9)
.
(6.9)
Если
подобрать массу добавочной системы m2
и жесткость консольной балки с2,
так, чтобы ω2
= ω, то числитель в выражении (6.9) обратится
в ноль, т.е. амплитуда подшипника х1
станет равна нулю – он перестанет
колебаться. При этом, как показывает
равенство (6.8), добавочная масса m2
будет колебаться с амплитудой
 .
Но
.
Но
 и, следовательно,
и, следовательно,
 или
или
 .
(6.10)
.
(6.10)
Уравнение (6.10) показывает, что упругая сила, возникающая от колебаний консольной балки с2 с амплитудой х2, равна и противоположна возбуждающей силе. Этим объясняется отсутствие колебаний подшипника: колеблющаяся добавочная масса создает в заделке балки С2 силу, полностью уравновешивающую возбуждающую силу. Таким образом, настроив добавочную систему m2, с2 на частоту возбуждения, можно устранить колебания основной системы (подшипника). Добавочную систему называют поглотителем колебаний или антивибратором.
6.3. Динамический поглотитель колебаний крутильной системы
(маятниковый противовес)
Описанный выше антивибратор пригоден лишь для гашения колебаний при определенном значении ω. Действительное устройство при этом должно быть достаточно прочным, чтобы балка с2 не сломалась от больших колебаний. Кроме того, массу m2 нельзя выбрать очень малой, так как тогда приходится брать малой и жесткость с2, чтобы получить ω2 = ω, а малая с2, как видно из уравнения (6.10), означает большую амплитуду х2 и, следовательно, опасность поломки балки.
В некоторых двигателях для гашения нежелательной гармоники возбуждения во всем диапазоне оборотов машины применяют маятник, показанный на рис. 6.4, а.
Частота
колебаний математического (точечного)
маятника
 ,
где l
– длина маятника,
g
–
ускорение силы тяжести. Если маятник
подвесить на вращающемся с валом диске
или продолжении щеки колена, то он будет
находиться под действием не тяжести, а
центробежной силы, ускорение которой
равно rω2
(рис. 6.4, б).
Следовательно, для маятника на вале,
вращающемся с угловой скоростью ω,
частота
,
где l
– длина маятника,
g
–
ускорение силы тяжести. Если маятник
подвесить на вращающемся с валом диске
или продолжении щеки колена, то он будет
находиться под действием не тяжести, а
центробежной силы, ускорение которой
равно rω2
(рис. 6.4, б).
Следовательно, для маятника на вале,
вращающемся с угловой скоростью ω,
частота
 ,
т.е. пропорциональна частоте вращения
вала. Если нужно уравновесить гармонику
k
– порядка к числу оборотов вала, то
можно подобрать r
и
l
так, чтобы
,
т.е. пропорциональна частоте вращения
вала. Если нужно уравновесить гармонику
k
– порядка к числу оборотов вала, то
можно подобрать r
и
l
так, чтобы
 .
Тогда при угловой скорости вала ω маятник
будет колебаться с частотой ωм=kω,
т.е. всегда на всех оборотах будет
уравновешивать нежелательную k
– гармонику.
.
Тогда при угловой скорости вала ω маятник
будет колебаться с частотой ωм=kω,
т.е. всегда на всех оборотах будет
уравновешивать нежелательную k
– гармонику.

Рис. 6.4. Маятниковый динамический поглотитель колебаний
Если
требуется устранить, например, 6-ю
гармонику, то
 и, следовательно, r
=
36l.
При расположении центра тяжести маятника,
например в 144 мм
от оси вращения, длина его l
должна равняться всего 4 мм.
Сделать маятник достаточных размеров
(чтобы масса маятника m2
отклонялась на приемлемую амплитуду
х2)
при такой длине маятника удается
применением бифилярного подвеса, на
двух пальцах в круглых отверстиях (рис.
6.5, а).
При таком подвесе маятниковый противовес
качается по закону качания математического
маятника, т.е. его частота
и, следовательно, r
=
36l.
При расположении центра тяжести маятника,
например в 144 мм
от оси вращения, длина его l
должна равняться всего 4 мм.
Сделать маятник достаточных размеров
(чтобы масса маятника m2
отклонялась на приемлемую амплитуду
х2)
при такой длине маятника удается
применением бифилярного подвеса, на
двух пальцах в круглых отверстиях (рис.
6.5, а).
При таком подвесе маятниковый противовес
качается по закону качания математического
маятника, т.е. его частота
 ,
где длина маятника равна разности
диаметра отверстия в щеке (и маятнике)
d0
и пальца dn
(рис. 6.5, в),
т.е. l
= d0
- dn.
Имеются и другие устройства, обеспечивающие
малые значения l,
необходимые для настройки маятникового
противовеса на гармонику
k-го
порядка. Можно помещать маятники и на
особых дисках, причем вполне возможно
разместить на диске три пары маятников,
каждая из которых имеет свою настройку
,
где длина маятника равна разности
диаметра отверстия в щеке (и маятнике)
d0
и пальца dn
(рис. 6.5, в),
т.е. l
= d0
- dn.
Имеются и другие устройства, обеспечивающие
малые значения l,
необходимые для настройки маятникового
противовеса на гармонику
k-го
порядка. Можно помещать маятники и на
особых дисках, причем вполне возможно
разместить на диске три пары маятников,
каждая из которых имеет свою настройку
 ,
и таким способом гасить две-три разных
гармоники. Конечно, в системе со многими
массами картина колебаний при установке
маятников много сложнее и применение
поглотителей колебаний требует обширных
специальных расчетов.
,
и таким способом гасить две-три разных
гармоники. Конечно, в системе со многими
массами картина колебаний при установке
маятников много сложнее и применение
поглотителей колебаний требует обширных
специальных расчетов.