

Автопилот
Автопилот представляет собой автоматическое устройство, осуществляющее стабилизацию и управление траекторией полёта.
Автопилот поддерживает заданный режим полёта самолёта, например курс, высоту полёта, крен, тангаж и изменяет режим полёта в соответствии с предписанной программой или по командам, задаваемым извне.
Автопилот вместе с самолётом составляет единую замкнутую систему автоматического регулирования, где автопилот является регулятором, а самолёт объектом регулирования. В отношении выбора схемы и параметров стабилизация и управление самолётом с помощью автопилота представляет собой задачу автоматического регулирования.
Выбор схемы автопилота, конструкции его элементов определяется назначением автопилота. В авиации автопилот облегчает работу лётчика, заменяя его во всех режимах полета самолета.
Разнообразие применения, сложность законов движения самолёта и автопилота создают исключительные трудности точного решения задач по расчёту, выбору схем и проектированию автопилотов.
Схемы автопилотов, применяемых на самолётах, весьма разнообразны. Различают, например, автопилоты с жёсткой обратной связью, без обратной связи, с эластичной обратной связью, с управлением по положению, по угловой скорости, и угловому ускорению, по скорости полёта, по высоте полёта и др.
Пилотирование, осуществляемое с помощью автопилота, является важным и сложным процессом автоматического управления самолетом.
Задача автоматического пилотирования состоит в поддерживании заданного режима полета самолета.
Первоначально при автоматизации полета роль автопилота заключалась в частичной разгрузке пилота от пилотирования самолетом. Затем с помощью автопилота навигационных и других средств стала возможной полная автоматизация различных этапов полета, начиная от взлета и кончая посадкой. В этом случае пилотирование самолетом осуществляется только с помощью автопилота, который является составной частью общей автоматической бортовой системы управления.
Как бы не использовался автопилот, всюду он выполняет функции автоматического регулятора. Поэтому совокупность кинематических параметров движения самолета с автопилотом следует рассматривать как систему автоматического регулирования.
Автопилотом называется автоматическое устройство, предназначенное для стабилизации заданного режима полета самолета.
Автопилот обычно реагирует на отклонения регулируемых параметров от их заданных значений. В зависимости от величины и знака отклонений автопилот воздействует на органы управления самолета так, чтобы возникшие отклонения уменьшить до допустимых значений или ликвидировать полностью.
Самолет как объект управления по отношению к угловым движениям является системой с тремя степенями свободы. Поэтому для управления самолетом автопилот должен иметь не менее трех каналов управления в соответствии с тремя органами управления рулем направления, рулем высоты и элеронами. Поэтому и каналы автопилота получили наименование: канал руля направления, канал руля высоты и канал элеронов. Указанные каналы могут быть связаны между собой и могут быть независимыми.
Обычно каналы автопилота построены не только по одинаковым функциональным схемам, но и содержат одинаковые отдельные устройства.
В общем случае функциональная схема одного из каналов управления автопилота вместе с самолетом представлена на рисунке.
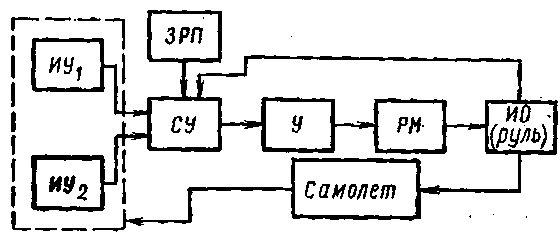
Функциональная схема одного из каналов автопилота (ИО), задатчик режима полета (ЗРП). Следует заметить, что в некоторых автопилотах не удается выделить его элементы в те звенья, которые изображены на рисунке. Суммирующее и усилительное устройство могут представлять один элемент или могут быть дополнительные промежуточные элементы в схеме автопилота.
Измерительные устройства являются чувствительными элементами канала автопилота, воспринимающими отклонения самолета от заданного положения.
В качестве измерительных устройств в автопилотах широко используются гироскопические приборы, реагирующие на угловые отклонения самолета и их производные. Например, трехстепенной гироскоп определяет угловое отклонение самолета, двухстепенный — угловую скорость.
Помимо приборов, непосредственно измеряющих углы и их производные, в автопилотах широко используются различного типа дифференцирующие и интегрирующие устройства.
Для измерения линейных отклонений, например, высоты, применяется барометрическое устройство, аналогичное высотомеру.
Гироскопические измерительные устройства обладают тем преимуществом, что они являются безынерционными звеньями, т. е. измерение регулируемого параметра производится без запаздывания.
Суммирующее устройство служит для алгебраического сложения сигналов, поступающих от измерительных устройств, устройств обратной связи и задатчика режима полета.
В качестве суммирующего устройства в современных автопилотах широко используются потенциометрические и мостовые схемы, а также магнитные усилители, которые, помимо суммирования входных сигналов, усиливают их.
Усилитель служит для усиления сигналов до величины, способной управлять рулевой машиной. В современных автопилотах усилитель электронный представляет собой комбинацию магнитного усилителя с электронным и имеет несколько каскадов, обеспечивающих усиление суммарного сигнала как по величине, так и по мощности.
Рулевая машина является исполнительным органом автопилота и служит для привода руля самолета в соответствие с заданным законом управления.
В современных автопилотах применяются как электромеханические, так и электрогидравлические рулевые машины.
Устройство обратной связи и за датчик режима полета в большинстве автопилотов выполнены в виде потенциометрических датчиков, преобразующих в первом случае угол отклонения руля в электрическое напряжение, а во втором случае—угол поворота рукоятки управления также в электрическое напряжение.
Указанные звенья автопилота при рассмотрении законов управления будем полагать безынерционными.