

Зайві ступені вільності і умови зв'язку
Під час дослідження структури механізмів можуть виявитися ступені вільності та умови зв'язку, що не впливають на рухомість механізму в цілому. Такі ступені вільності і умови зв'язку називають зайвими.
Як приклад, на рис. 2.12 зображено схему кулачкового механізму, до складу якого входить стояк 0, кулачок 7, штовхач 2, ролик 3. Стояк і кулачок утворюють обертову пару V класу, кулачок і ролик — пару IV класу, штовхач і стояк — поступальну пару V класу, штовхач і ролик — обертову пару V класу. Тоді, виходячи з числа рухомих ланок і кінематичних пар, ступінь вільності механізму за формулою Чебишова:
W = 3n – 2 p5 – p4 = 33 – 23 – 1 = 2
Проте очевидно, що у цьому механізмі досить знати положення одного кулачка, щоб однозначно визначити положення штовхача, тобто досить мати одну початкову ланку, а не дві, як це випливає з формули Чебишова. В цьому механізмі ролик 3 створює зайвий ступінь вільності, він може перекочуватися і ковзати відносно кулачка, що не впливає на характер руху штовхача. Ролик є конструктивним елементом, який введено для заміни тертя ковзання тертям кочення, тобто для зменшення опору сил тертя і зношення ланок. Кінематика механізму не змінюється, якщо ролик забрати і штовхач 2 безпосередньо з'єднати з кулачком 1у кінематичну пару IV класу (на рис. 2.12 цей випадок показано штриховою лінією).
На рис. 2.13 зображено механізм спарника (паралельних кривошипів), з розмірами ланок: АВ = СD, АD = ЕF = ВС, АЕ = DF і ВЕ = СF. За кількістю рухомих ланок (n = 4) і пар V класу (p5 = 6) ступінь вільності механізму W = 0, тобто цей кінематичний ланцюг є нерухомою фермою. Проте, коли ланка ЕF паралельна ланці ВС, механізм має один ступінь вільності (W = 1), оскільки фігура АВСD завжди утворює паралелограм, і, отже, відстань між точками Е і F ніколи не змінюється і дорівнює відстані між точками А і D або В і С. Тоді без усякого порушення характеру руху механізму ланку ЕF (або ВС) можна забрати, оскільки ця ланка накладає на рух механізму зайві (пасивні) зв'язки, тобто нові зв'язки на вже існуючі. На практиці вводять ланку ЕF для збільшення жорсткості механізму.
Під час проведення структурного аналізу механізму необхідно позбутися зайвих ступенів вільності і пасивних зв'язків.
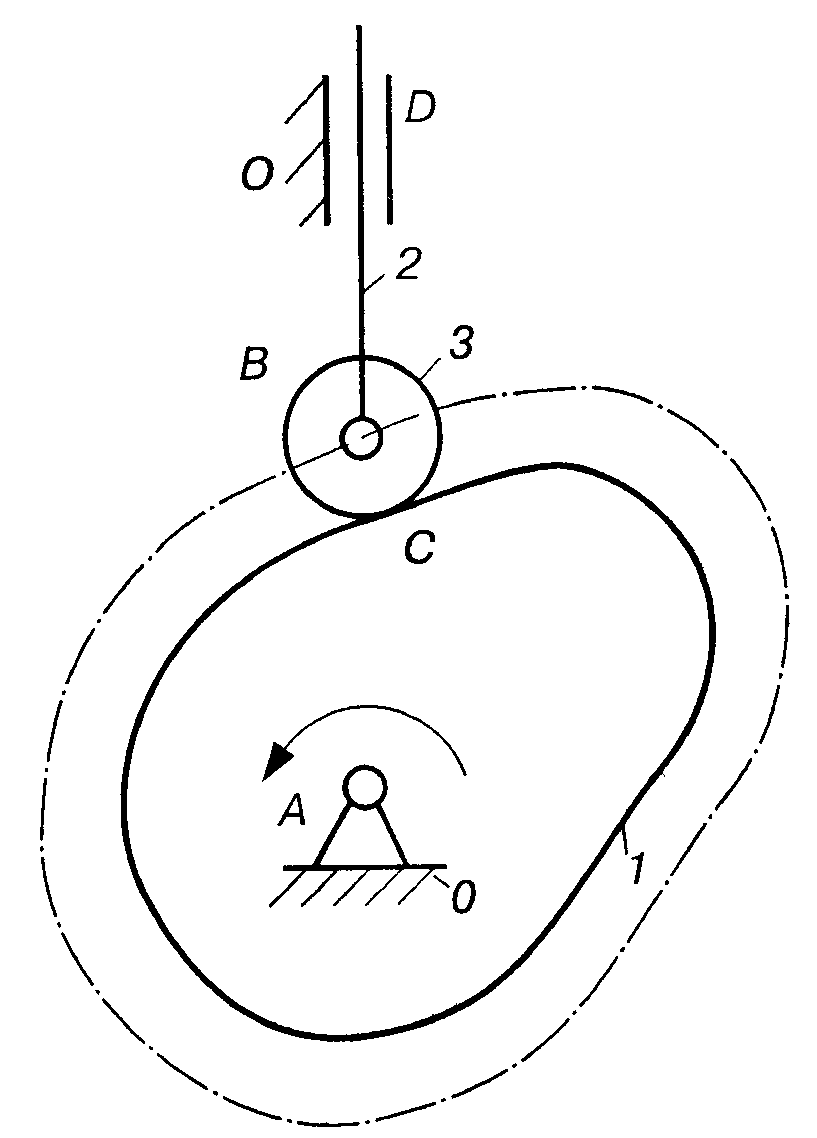
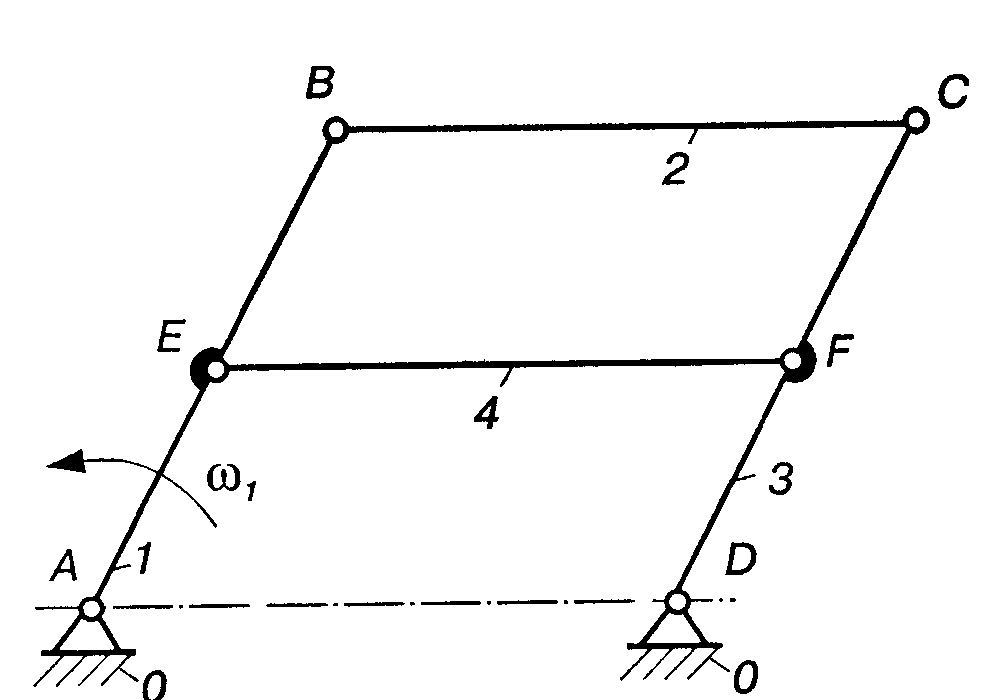
Рис. 2.12 Рис. 2.13
Заміна вищих кінематичних пар нижчими
При структурному аналізі механізмів вищі кінематичні пари зручно замінити нижчими. При цьому має задовольнятися умова структурної еквівалентності, тобто щоб замінний механізм мав таке саме число ступенів вільності і щоб характер миттєвого відносного руху не змінився.
На рис. 2.14 зображено схему триланкового плоского механізму з двома обертовими парами (А і В) та однією вищою парою С, утвореною ланками 7, 2 Профілями елементів пари С є дві дуги кіл з центрами К1 і K2. Ступінь вільності такого механізму:
W = 3n – 2p5 – p4 = 3 2 – 22 – 1 = 1. (2.4)
Незважаючи на те що точка С дотику профілів ланок 2, З під час руху механізму змінює своє положення, відстань К1K2 = r1+r2 = const. Тому заданий механізм буде еквівалентний плоскому шарнірному чотириланковому механізму (рис. 2.14,б), в якого довжини відрізків АК1, К1K2, ВК2 такі самі, як на рис. 2.14, а, і ступінь вільності:
W = 3n – 2p5 – p4 = 33 – 24 – 0 = 1. (2.5)
Замінний механізм АК1K2В еквівалентний заданому і за законом руху ланок, тобто зберігається відношення швидкостей 1/3.
Порівнюючи механізми, зображені на рис. 2.14,а,б, та залежності (2.4) і (2.5), бачимо, що вища пара у плоских механізмах еквівалентна одній умовній ланці і двом кінематичним парам V класу.
Розглянутий спосіб заміни механізму можна узагальнити й тоді, коли профілями вищих пар є криві змінної кривизни і мають спільну дотичну в точках спряження профілів (рис. 2.14,в). Однак у цьому випадку кожному положенню механізму відповідають різні еквівалентні "миттєві" шарнірні чотириланкові механізми АК1K2В, у яких К1 і К2 є миттєвими центрами кривизни профілів, що відповідають точці С дотику.
Таким чином, щоб замінити вищу кінематичну пару нижчою, необхідно ввести додатково умовну ланку з двома обертовими кінематичними парами V класу, центри шарнірів яких треба розмістити у центрах кривизни профілів ланок, що утворюють цю вищу пару, і заново введену ланку слід з'єднати нижчими парами з тими ланками, які входили до складу вищої пари.

Рис. 2.14