

Ковзання профілів зубів
Розглянемо
тепер інші складові швидкості точки
контакту —
![]() i
i
![]() .
Ці складові не рівні між собою, інакше
повинні бути рівні між собою швидкості
.
Ці складові не рівні між собою, інакше
повинні бути рівні між собою швидкості
![]() і
і
![]() як за величиною, так і
за напрямком.
Як видно з рис. 17.1, така рівність можлива
лише в одному положенні механізму, коли
точка К
контакту зубів буде збігатися з полюсом
П.
Для всіх інших положень ланок передачі
як за величиною, так і
за напрямком.
Як видно з рис. 17.1, така рівність можлива
лише в одному положенні механізму, коли
точка К
контакту зубів буде збігатися з полюсом
П.
Для всіх інших положень ланок передачі
![]() .
В результаті цього має місце відносне
ковзання профілів зубів у напрямку їх
спільної дотичної t–t.
Причому, чим далі знаходиться точка К
від полюса зачеплення, тим більша
швидкість ковзання. Ковзання зубів є
основною причиною втрат енергії на
тертя спрацювання.
.
В результаті цього має місце відносне
ковзання профілів зубів у напрямку їх
спільної дотичної t–t.
Причому, чим далі знаходиться точка К
від полюса зачеплення, тим більша
швидкість ковзання. Ковзання зубів є
основною причиною втрат енергії на
тертя спрацювання.
Як видно з рис. 17.1, швидкість ковзання профілів зубів:
![]() (17.5)
(17.5)
Можна показати, що для зовнішнього зачеплення:
![]()
![]() (17.6)
(17.6)
для внутрішнього зачеплення:
![]() (17.7)
(17.7)
Отже, чим далі розташована точка контакту К відносно полюса зачеплення П, тим більша швидкість ковзання.
При
одній і тій самій швидкості ковзання
спрацювання у спряжених профілях може
бути різним. Для кількісної оцінки
спрацювання вводиться поняття
питомого
ковзання зубів, під яким розуміють
відношення швидкості ковзання
![]() точки
контакту зубів до дотичної складової
точки
контакту зубів до дотичної складової
![]() швидкості точки контакту відповідного
колеса
(і
= 1; 2), тобто:
швидкості точки контакту відповідного
колеса
(і
= 1; 2), тобто:
 (17.8)
(17.8)
Для побудови діаграм питомого тиску можна використати такі формули [Курсовое проектирование по теории механизмов и машин под ред. А.С. Кореняко]:
![]()
![]() (17.9)
(17.9)
де: е = В1В2 — довжина теоретичної лінії зачеплення (див. рис. 17.1);
i12 = 1 /2 = z2 / z1; i21 = 2 /1 = z1 / z2;
x – відстань від точки B1 дотику лінії зачеплення з основним колом першого колеса, яку відраховуємо у напрямку до точки В2.
На
рис. 17.2 показано приклади діаграм
питомого ковзання
![]() .
При цьому треба враховувати, що кут
повороту зубчастого колеса пропорційний
відрізкам лінії В1B2.
.
При цьому треба враховувати, що кут
повороту зубчастого колеса пропорційний
відрізкам лінії В1B2.
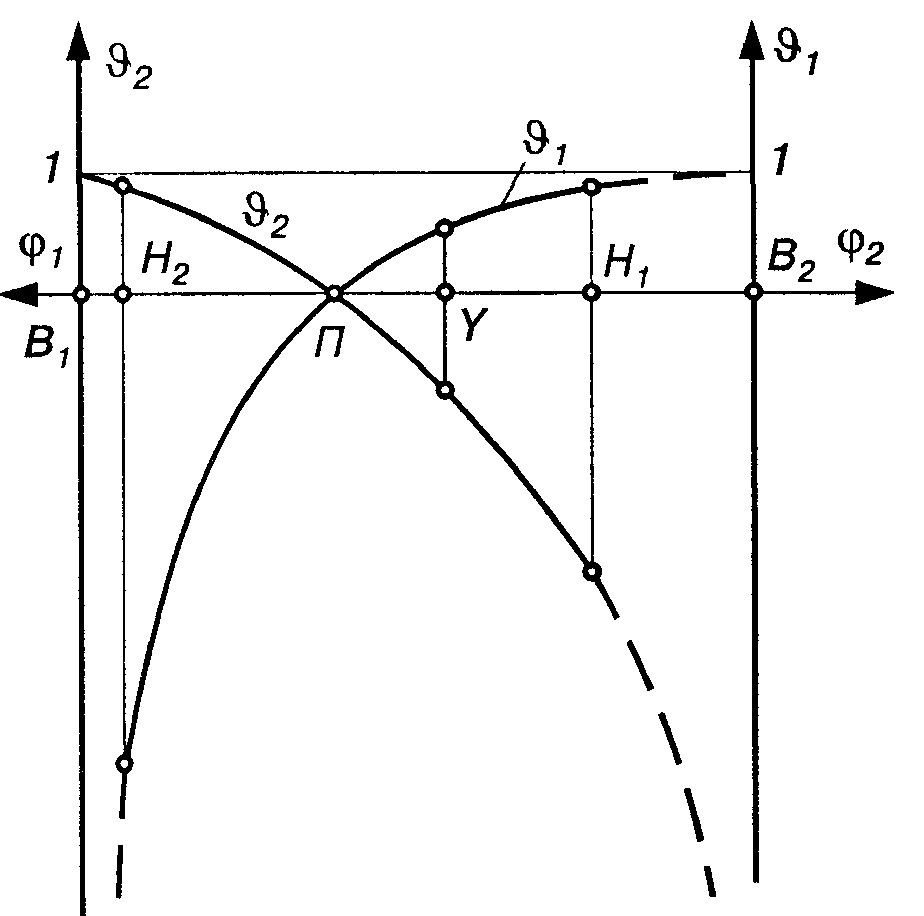
Рис. 17.2
У полюсі зачеплення питоме ковзання дорівнює нулю, отже, профілі перекочуються один по одному без ковзання.
На
початкових головках зубів, що розташовані
між колом вершин і початковим колом,
питоме ковзання невелике; на початкових
ніжках (між початковим колом і колом
западин) питоме ковзання значно
більше, ніж на початкових головках. На
початковій ніжці першого колеса
(шестерні) питоме ковзання
![]() значно більше, ніж на початковій ніжці
іншого колеса. Це означає, що спрацювання
ніжки зуба шестерні при роботі передачі
буде значно більшим, ніж спрацювання
початкової ніжки зуба колеса.
значно більше, ніж на початковій ніжці
іншого колеса. Це означає, що спрацювання
ніжки зуба шестерні при роботі передачі
буде значно більшим, ніж спрацювання
початкової ніжки зуба колеса.
Лекція 18 властивості і рівняння евольвенти кола
Для побудови головного профілю зубів циліндричних зубчастих коліс, що використовуються в машинобудуванні, найперше застосовується евольвентний профіль. Плоскою евольвентою кола називають траєкторію будь-якої точки, наприклад А (рис. 1), прямої лінії, яка перекочується без ковзання по колу радіуса rb; таке коло називають еволютою, або основним колом, а пряму — твірною прямою.
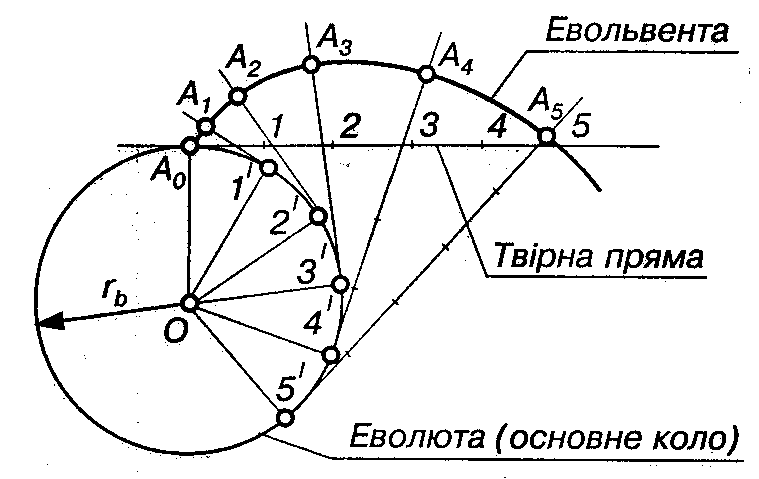
Рис. 18.1
Побудова
евольвенти кола зображена на рис. 1.
Проводимо до основного кола твірну
пряму, яка дотикається до нього у
точці A0.
Потім
перекочуємо твірну пряму по основному
колу без ковзання. Для цього від точки
А0
відкладаємо
на твірній прямій ряд однакових відрізків
А0-1,
1-2, 2-3
і т. д. На основному колі від цієї ж точки
відкладаємо дуги
![]() і
т. д., що дорівнюють цим відрізкам.
і
т. д., що дорівнюють цим відрізкам.
При
перекочуванні прямої по колу без ковзання
точка 1
збігається з точкою 1,
точка 2
—
з точкою 2'
і т. д. Проведемо через точки 1,
2', 3'
і т. д. дотичні до кола (для точної побудови
дотичної слід спочатку провести радіус
у відповідну точку, а потім провести до
нього перпендикуляр) і відкладаємо на
них з точок дотику відрізки 1—А1,
2'—А2,
3'—А3
і т. д., що дорівнюють відповідно відрізкам
прямої А0—1,
А0—2,
А0—3
і т. д. (або дугам
![]() і
т. д.). З'єднуючи точки А0,
А1,
А2
і
т. д. плавною кривою, одержуємо евольвенту.
і
т. д.). З'єднуючи точки А0,
А1,
А2
і
т. д. плавною кривою, одержуємо евольвенту.
Широке використання евольвенти при проектуванні профілів зубів пояснюється низкою важливих властивостей.
Відмітимо основні властивості евольвенти:
1. Твірна пряма завжди нормальна до евольвенти. Дійсно, точка дотику твірної прямої з основним колом є при утворенні евольвенти миттєвим центром обертання твірної прямої, а тому відповідні відрізки (1—А1, 2'—А2, 3'—А3, і т. д.) є миттєвими радіусами кривизни евольвенти. Оскільки радіус кривизни завжди розміщений нормально до кривої, то твірна пряма завжди нормальна до евольвенти.
2. Евольвента є кривою без перегинів, що дуже важливо при виготовленні різального інструмента.
3. Форма евольвенти залежить тільки від радіуса основного кола, тобто не залежить від параметрів спряженого колеса — це дає змогу використовувати евольвентні зубчасті колеса в коробках передач, тобто у механізмах зі змінними зубчастими колесами, у яких з одним колесом можуть входити у зачеплення колеса з різним числом зубів.
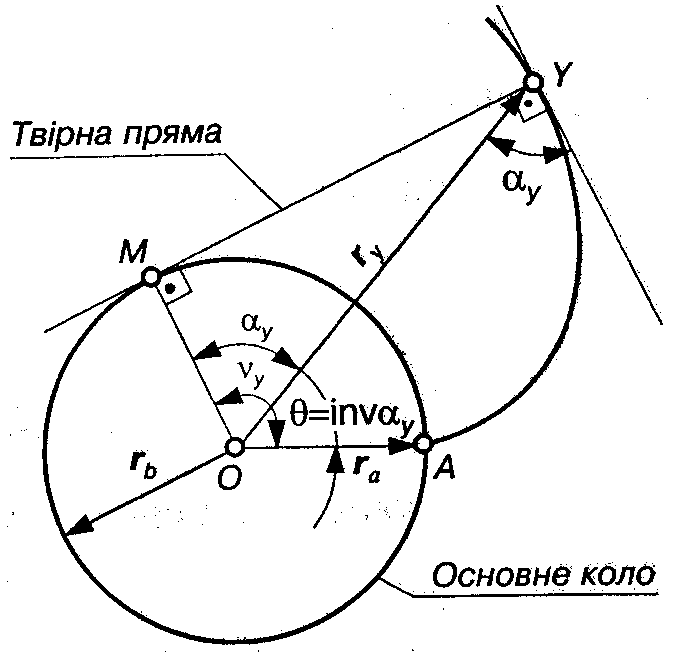
Рис. 18.2