

Приклади структурного аналізу плоских механізмів
Порядок проведення структурного аналізу механізмів:
1. Визначають число ступенів вільності механізму (або кінематичного ланцюга). Ланки, які створюють зайві зв'язки і зайві ступені вільності, при структурному аналізі відкидають. Якщо є кінематичні пари IV класу, то їх треба замінити парами V класу (див. Лекцію 2) і окремо викреслити структурну схему замінного механізму.
2. Виділяють початкові ланки, кількість яких визначається числом ступенів вільності механізму (кінематичного ланцюга). Початкова ланка і стояк утворюють механізм І класу.
3. Розбивають механізм на структурні групи. Відокремлення структурної групи частіше всього розпочинають з ланок і пар, найвіддаленіших від початкової ланки. Розпочинають із спроби від'єднати від механізму групи II класу. Від'єднуючи структурні групи, треба перевірити число ступенів вільності W тієї частини механізму, яка залишилась, при цьому W змінюватися не повинно. Групи відокремлюються до того часу, поки не залишаться одна початкова ланка і стояк (механізм І класу), якщо W=1, чи кілька початкових ланок, кількість яких дорівнює одержаному числу ступенів вільності. Якщо спроби відокремлення груп II класу не дадуть такого результату, треба переходити до спроб відокремлення груп III класу, потім IV тощо.
4. Визначають клас і порядок структурних груп і клас механізму.
5. Записують формулу будови механiзму.
Приклад 3.1. Виконати структурний аналіз механізму поперечно-стругального верстата (рис. 3.11,а), якщо початкова ланка — кривошип ОА.
Розв'язання. Механізм поперечно-стругального верстата складається з п'яти рухомих ланок (n= 5) і семи кінематичних пар V класу (р5 = 7): O(0, 1), А(1, 2), А3(2, 3), В(0, 3), С(3, 4), D (4, 5), D0(0, 5). Число ступенів вільності такого механізму визначаємо за формулою Чебишова:
W=3n – 2p5 – p4=35 – 27=1.
У такому механізмі має бути одна початкова ланка, пасивних (зайвих) зв'язків і зайвих ступенів вільності, а також пар IV класу немає. Тут і далі розглядаємо ідеальні механізми.
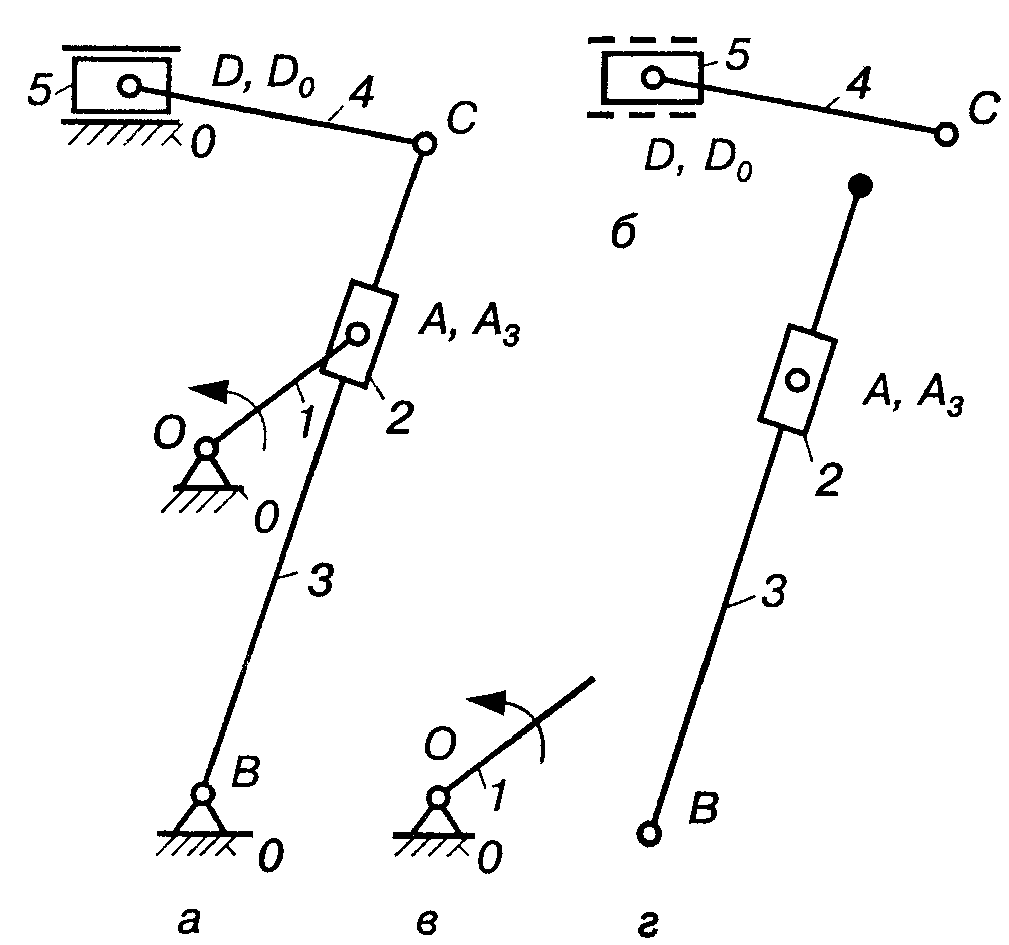
Рис. 3.11
Розкладаємо механізм на групи Ассура. Спочатку відокремлюємо ланцюг, який складається з двох ланок 4, 5 і трьох кінематичних пар С, О, D0 (рис. 3.11,б), знаходимо число ступенів вільності для залишкової частини механізму:
W = 33–24 = 1.
Враховуючи, що W не змінилось, виділяємо ланцюг, який складається з ланок 4, 5, є групою II класу II порядку.
Далі відокремлюємо ланцюг, який складається з ланок 2, 3 і трьох пар А, А3, В (рис. 3.11,в). Після цього залишається одна початкова ланка (рис. 3.11,г), в якої W=1. Отже, ланцюг 2—3 є також групою II класу II порядку. Таким чином, механізм поперечно-стругального верстата складається з механізму І класу і двох фуп II класу II порядку, тому він належить механізму II класу.
Для такого механізму можна записати формулу будови:
I(1) II(2,3) II(4,5),
де цифрою І позначено механізм І класу, цифрою II — клас групи. Номери ланок, що входять до складу механізму І класу та груп, взято у дужки.