

Дослідження руху механізмів методом віттенбауера
Метод Віттенбауера випливає з відомої залежності кінетичної енергії механізму
![]() (10.7)
(10.7)
де
![]() —
зведений момент інерції;
—
зведений момент інерції;
![]() — кутова швидкість ланки зведення
механізму (машини).
Залежність (10.7) можна записати так:
— кутова швидкість ланки зведення
механізму (машини).
Залежність (10.7) можна записати так:
![]() (10.8)
(10.8)
Таким
чином, кутову швидкість ланки зведення
в кожному положенні механізму можна
визначити, якщо відомо відношення його
кінетичної енергії до зведеного моменту
інерції, взятих для цього ж положення.
Інакше кажучи, треба мати залежність Т
= T(![]() ),
яка встановлює зв'язок між кінетичною
енергією Т
і зведеним моментом інерції
.
Цю
задачу
зручно розв'язувати графічно. Спочатку
будують діаграми кінетичної енергії Т
= T()
і зведеного моменту інерції
),
яка встановлює зв'язок між кінетичною
енергією Т
і зведеним моментом інерції
.
Цю
задачу
зручно розв'язувати графічно. Спочатку
будують діаграми кінетичної енергії Т
= T()
і зведеного моменту інерції
![]() залежно від кута повороту ланки зведення,
потім, на основі цих діаграм, будують
діаграму Т
= T(
)
виключивши спільний параметр .
Якщо побудова діаграми
не
становить труднощів — це питання ми
розглянули вище, то для побудови
діаграми Т
= T()
необхідно мати діаграми зведених
моментів рушійних сил Мр
= Мр()
і сил опору Мo=Мo().
Такі діаграми будують на основі механічних
характеристик двигунів і робочих машин.
Практично це досить складні задачі,
які, як правило, розв'язуються з певним
припущенням.
залежно від кута повороту ланки зведення,
потім, на основі цих діаграм, будують
діаграму Т
= T(
)
виключивши спільний параметр .
Якщо побудова діаграми
не
становить труднощів — це питання ми
розглянули вище, то для побудови
діаграми Т
= T()
необхідно мати діаграми зведених
моментів рушійних сил Мр
= Мр()
і сил опору Мo=Мo().
Такі діаграми будують на основі механічних
характеристик двигунів і робочих машин.
Практично це досить складні задачі,
які, як правило, розв'язуються з певним
припущенням.
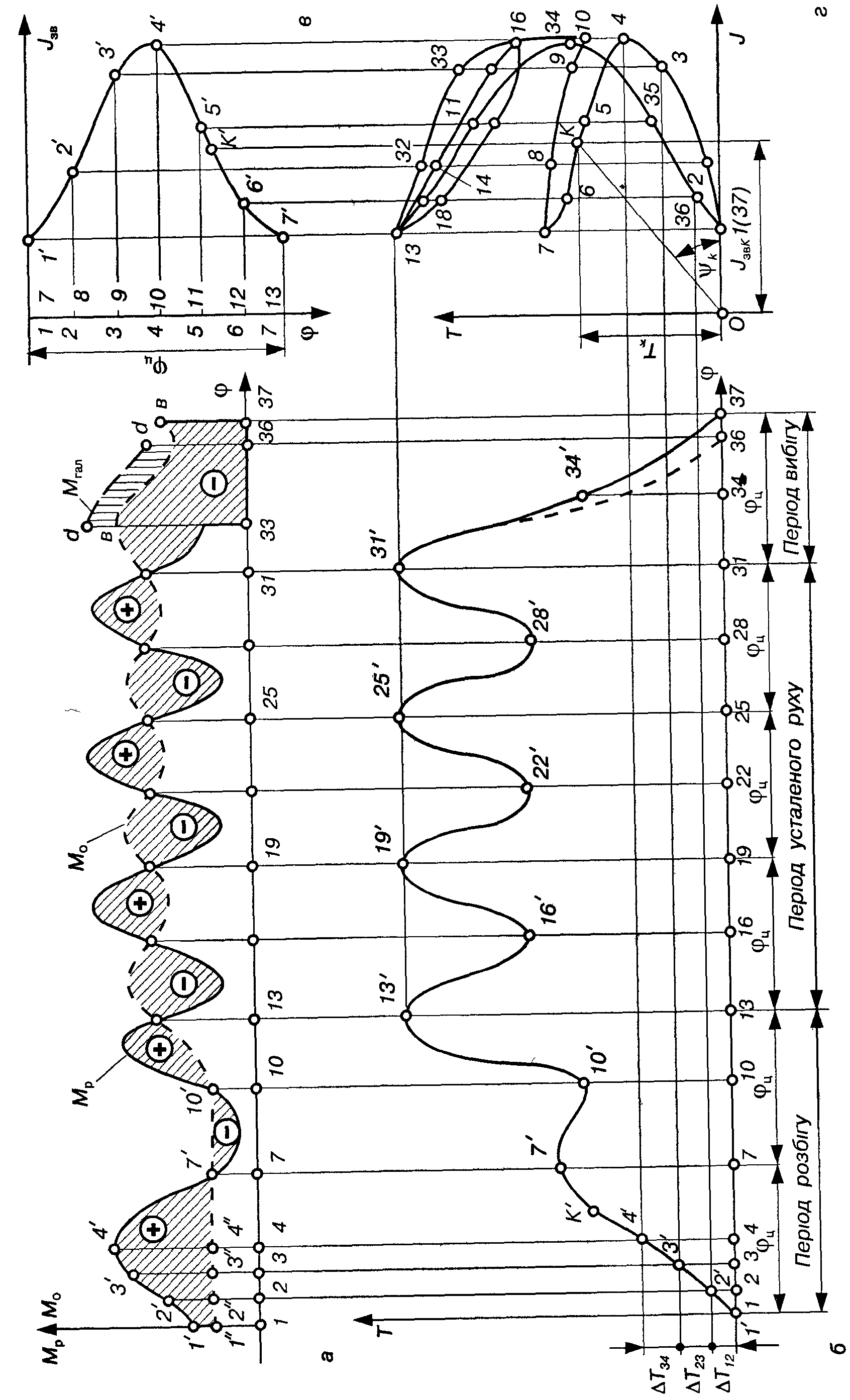
Нехай задано діаграми зведених моментів рушійних сил Мр = Мр() і сил опору Мo = Мo() як функції кута повороту початкової ланки (рис. 10.4, а). Маючи такі діаграми, можна знайти роботу рушійних сил і сил опору. Робота зведеного моменту Мp на вибраному інтервалі визначається за формулою
 (10.9)
(10.9)
де
кут
— кут повороту ланки зведення. Величина
цієї роботи виражається в масштабі
площею, що обмежена кривою Мp
= Мp
(),
віссю
і крайніми ординатами вибраного інтервалу
![]() .
Робота зведеного моменту Мo
виражається формулою
.
Робота зведеного моменту Мo
виражається формулою
 і площею, що обмежена кривою Мo
= Мo
(),
віссю
і крайніми ординатами інтервалу
.
і площею, що обмежена кривою Мo
= Мo
(),
віссю
і крайніми ординатами інтервалу
.
Приріст кінетичної енергії механізму за будь-який проміжок часу, що виражається рівнянням
![]() (10.10)
(10.10)
дорівнює
різниці площі кривих Мp
= Мp
()
і Мo
= Мo
(),
помноженій на відповідні масштаби
моментів
![]() і кута повороту
і кута повороту
![]() .
Наприклад, на ділянці 1—2
(рис. 10.4, а)
робота зведеного моменту Мp
виражається площею
.
Наприклад, на ділянці 1—2
(рис. 10.4, а)
робота зведеного моменту Мp
виражається площею
![]() мм2,
помноженою на масштаби
і
,
а робота зведеного моменту Мo
—
площею
мм2,
помноженою на масштаби
і
,
а робота зведеного моменту Мo
—
площею
![]() ,
помноженою на ці самі масштаби. Приріст
кінетичної енергії
,
помноженою на ці самі масштаби. Приріст
кінетичної енергії
![]() визначається тоді площею
визначається тоді площею
![]() ,
помноженою на ті самі масштаби, тобто
,
помноженою на ті самі масштаби, тобто
![]()
![]()
Приріст
кінетичної енергії на ділянці 2—3
пропорційний площі
![]() ,
на ділянці 3—4
—
площі
,
на ділянці 3—4
—
площі
![]() і т. д.
і т. д.
Таким чином, зміна кінетичної енергії завжди пропорційна площі, яка знаходиться між кривими моментів рушійних сил і сил опору (на рис. 10.4, а ці площі заштриховані). Цим площам треба приписувати знак "+ " або "–" залежно від того, яка робота буде більша: моменту рушійних сил чи моменту сил опору. Так, на інтервалі 1—7 крива моменту рушійних сил розміщена вище від кривої моментів сил опору, отже, приріст кінетичної енергії додатний і, навпаки, на інтервалі 7—10 приріст кінетичної енергії від'ємний і т. п. За весь час роботи механізму від точки 1 до точки 37 приріст кінетичної енергії дорівнює нулю, тобто сума всіх заштрихованих площадок зі знаком "+" повинна дорівнювати сумі площадок із знаком "–", оскільки в момент пуску механізму і момент його зупинки швидкість ланки зведення дорівнює нулю. Така сама рівність повинна мати місце і за час усталеного руху (13—13), оскільки в цьому випадку швидкість ланки зведення механізму через кожний цикл повертається до попереднього значення.
На
рис. 10.4,а
умовно показано три повних цикли
![]() усталеного руху. Практично число цих
циклів може бути різним залежно від
часу безперервної роботи машини.
усталеного руху. Практично число цих
циклів може бути різним залежно від
часу безперервної роботи машини.
Підрахувавши
величини вказаних вище площадок, можна
побудувати діаграму Т
= T()
зміни кінетичної енергії ланки зведення
у функції кута повороту
(рис. 10.4, б).
Побудову почнемо з першого інтервалу
1—2.
Обчислюємо площу
![]() у
квадратних міліметрах. Нехай ця площа
дорівнює S12
(мм2).
Тоді приріст кінетичної енергії на
цьому інтервалі визначається за формулою:
у
квадратних міліметрах. Нехай ця площа
дорівнює S12
(мм2).
Тоді приріст кінетичної енергії на
цьому інтервалі визначається за формулою:
![]()
Оскільки
механізм почав рухатися з положення,
що відповідає точці 1,
то очевидно, що початковий запас
кінетичної енергії Т1
дорівнює нулю і повний запас кінетичної
енергії механізму в положенні 2
виразиться величиною
![]() .
Цю величину відкладаємо у вигляді
відрізка 2—2'
в масштабі
.
Цю величину відкладаємо у вигляді
відрізка 2—2'
в масштабі
![]() на
ординаті, проведеній у точці 2
(рис. 10.4, б).
Маємо
на
ординаті, проведеній у точці 2
(рис. 10.4, б).
Маємо
![]()
Далі
обчислюємо наступну площадку
![]() ,
мм2.
З попереднього маємо
,
мм2.
З попереднього маємо
![]()
тобто
приріст кінетичної енергії на ділянці
2—3
виражається площею
![]() [мм2],
помноженою на добуток масштабів
і
[мм2],
помноженою на добуток масштабів
і
![]() .
.

Знайдену
величину
![]() відкладаємо на ординаті в точці 3
у вигляді відрізка 3"
– 3'
у масштабі
відкладаємо на ординаті в точці 3
у вигляді відрізка 3"
– 3'
у масштабі
![]() додаючи його до попереднього відрізка
- (3
- 3')
= (2
– 2')
+
(3"
–3')
і т. п. Ординати діаграми кінетичної
енергії збільшуються до положення 7,
де в точці 7
вона має вершину, що відповідає одному
з максимумів кінетичної енергії. Далі
на ділянці 7—10
крива опускається, оскільки заштрихована
площа, що міститься між цими точками
осі абсцис, має знак "–" (Мо
> Мp).
Починаючи з точки 10,
крива кінетичної енергії підіймається
до положення 13,
де ця крива знов має вершину в точці
13'
і т. п. На ділянці 13—31,
де діаграма описує усталений рух,
крива повторюється через кожний цикл
руху механізму, що відповідає куту
,
причому ордината її досягає то свого
максимуму, то свого мінімуму. У
положенні 31
ордината кривої Т
= T()
має останній максимум, після чого спадає
завдяки наявності на ділянці 33—37
тільки сил опору, а на ділянці 31—33
Мo>Мp.
Точка 37
відповідає моменту зупинки механізму,
тобто повному вичерпанню кінетичної
енергії, зібраної в період розгону.
Очевидно, що витрати нагромадженої
кінетичної енергії можна прискорити,
ввівши додаткові опори (гальма). На рис.
10.4, б
гальмівний
момент Мгал
зображено штриховою лінією.
додаючи його до попереднього відрізка
- (3
- 3')
= (2
– 2')
+
(3"
–3')
і т. п. Ординати діаграми кінетичної
енергії збільшуються до положення 7,
де в точці 7
вона має вершину, що відповідає одному
з максимумів кінетичної енергії. Далі
на ділянці 7—10
крива опускається, оскільки заштрихована
площа, що міститься між цими точками
осі абсцис, має знак "–" (Мо
> Мp).
Починаючи з точки 10,
крива кінетичної енергії підіймається
до положення 13,
де ця крива знов має вершину в точці
13'
і т. п. На ділянці 13—31,
де діаграма описує усталений рух,
крива повторюється через кожний цикл
руху механізму, що відповідає куту
,
причому ордината її досягає то свого
максимуму, то свого мінімуму. У
положенні 31
ордината кривої Т
= T()
має останній максимум, після чого спадає
завдяки наявності на ділянці 33—37
тільки сил опору, а на ділянці 31—33
Мo>Мp.
Точка 37
відповідає моменту зупинки механізму,
тобто повному вичерпанню кінетичної
енергії, зібраної в період розгону.
Очевидно, що витрати нагромадженої
кінетичної енергії можна прискорити,
ввівши додаткові опори (гальма). На рис.
10.4, б
гальмівний
момент Мгал
зображено штриховою лінією.
Діаграму
зведених моментів інерції досить
побудувати тільки для одного циклу
роботи механізму (рис. 10.4, в),
оскільки
![]() є функцією положень механізму
(див. параграф 4.9). Для зручності
наступної побудови кривої Віттенбауера
діаграму
повернуто на 90°.
є функцією положень механізму
(див. параграф 4.9). Для зручності
наступної побудови кривої Віттенбауера
діаграму
повернуто на 90°.
Маючи
діаграми Т=
Т()
і
будуємо діаграму
![]() (рис. 10.4, г).
Для цього на осі ординат відкладаємо
значення кінетичної енергії, що
визначаються відрізками 1—1',
2 —2', 3—3'
і т. п. діаграми Т
=
Т(),
а по осі абсцис — значення зведеного
моменту інерції, що визначається
відрізками 1—1',
2 —2',
3—3'
і т. п. діаграми
.
Знайдені точки 1,
2,
3
і т. п. у системі координат
(рис. 10.4, г).
Для цього на осі ординат відкладаємо
значення кінетичної енергії, що
визначаються відрізками 1—1',
2 —2', 3—3'
і т. п. діаграми Т
=
Т(),
а по осі абсцис — значення зведеного
моменту інерції, що визначається
відрізками 1—1',
2 —2',
3—3'
і т. п. діаграми
.
Знайдені точки 1,
2,
3
і т. п. у системі координат
![]() послідовно з'єднуємо плавною кривою,
дістаємо криву кінетичної енергії Т
як функцію зведеного моменту інерції,
тобто залежність
послідовно з'єднуємо плавною кривою,
дістаємо криву кінетичної енергії Т
як функцію зведеного моменту інерції,
тобто залежність
![]() Цю криву називають
кривою
Віттенбауера
за ім'ям австрійського вченого, який
вперше розглянув цей метод.
Цю криву називають
кривою
Віттенбауера
за ім'ям австрійського вченого, який
вперше розглянув цей метод.
За допомогою кривої Віттенбауера легко встановити залежність кутової швидкості ланки зведення у функції кута повороту .
Виберемо
на кривій
яку-небудь точку К
і з'єднаємо цю точку з точкою О
—
початком координат (рис. 10.4, г).
Позначимо кут, утворений прямою ОК
з віссю абсцис,
![]() .
Оскільки по осі абсцис відкладено
зведений момент інерції
.
Оскільки по осі абсцис відкладено
зведений момент інерції
![]() y масштабі J,
що відповідає точці К,
по осі ординат — кінетичну енергію TK,
що відповідає тій самій точці К
у масштабі
y масштабі J,
що відповідає точці К,
по осі ординат — кінетичну енергію TK,
що відповідає тій самій точці К
у масштабі
![]() ,
то очевидно, що відношення цих величин
дасть тангенс кута
нахилу кривої ОК
до
осі
,
тобто:
,
то очевидно, що відношення цих величин
дасть тангенс кута
нахилу кривої ОК
до
осі
,
тобто:
![]() (10.11)
(10.11)
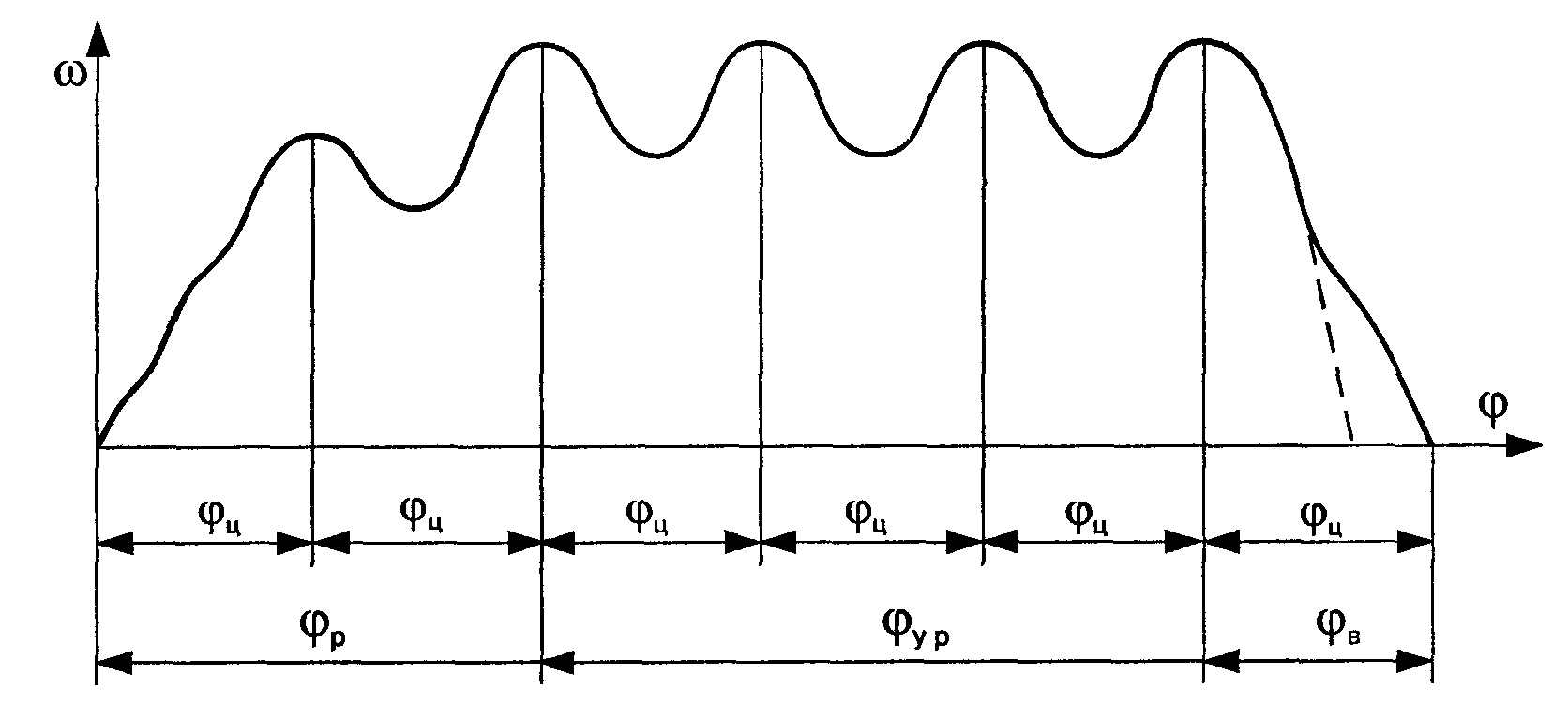
Рис.10.5
Тоді швидкість ланки зведення в положенні, яке визначається точкою К, знаходимо за формулою (10.8), тобто:
![]() (10.12)
(10.12)
Аналогічно визначають швидкості ланки зведення в інших положеннях механізму. Використовуючи ці значення, можна побудувати графік кутової швидкості ланки зведення як функції кута , тобто графік = () (рис. 10.5).
Графік часу t руху як функції кута (р можна побудувати, якщо використати формулу (10.13), оскільки будь-який проміжок часу від початку руху до даного моменту часу ti визначається за формулою:
 (10.13)
(10.13)
Інтеграл
у правій частині формули (10.13) можна
визначити графічно, якщо побудувати
графік величини ()
як функцію кута ,
оскільки відома функція
= ().
За графіками
= ()
і t
= t()
можна побудувати графік
= (t).
Кутове прискорення
![]() ланки зведення визначається графічним
диференціюванням функції
= (t).
ланки зведення визначається графічним
диференціюванням функції
= (t).
Знаючи
кутову швидкість
і кутове прискорення
![]() ланки зведення, можна визначити швидкості,
прискорення і сили інерції окремих
ланок, а також виконати повний силовий
розрахунок механізму в умовах
нерівномірного обертового руху ланки
зведення.
ланки зведення, можна визначити швидкості,
прискорення і сили інерції окремих
ланок, а також виконати повний силовий
розрахунок механізму в умовах
нерівномірного обертового руху ланки
зведення.
Таким чином, за допомогою кривої Віттенбауера можна повністю дослідити рух машинного агрегату при силах, що залежать від положення ланки зведення.