

Геометричні та кінематичні умови існування передачі
Профілі
зубів, їх розташування відносно ділильного
кола, розміри зубів за висотою та їх
товщина на кожному зубчастому колесі,
а отже, і властивості самої передачі,
однозначно визначаються сукупністю
значень трьох величин: коефіцієнтів
зміщень
![]() ,
,
![]() і кута нахилу лінії зуба
і кута нахилу лінії зуба
![]() .
Вибір потрібних значень цих величин
для конкретної зубчастої передачі (
,
.
Вибір потрібних значень цих величин
для конкретної зубчастої передачі (
,![]() ,
т)
—
один із перших і важливих етапів її
проектування. Невдалий вибір цих
параметрів (
,
т)
—
один із перших і важливих етапів її
проектування. Невдалий вибір цих
параметрів (![]() ,
,![]() ,
)
може призвести до погіршення кінематичних
і міцністних характеристик передачі
або навіть до неможливості перетворення
руху за заданим законом.
,
)
може призвести до погіршення кінематичних
і міцністних характеристик передачі
або навіть до неможливості перетворення
руху за заданим законом.
Розглянемо явища, при яких неможлива реалізація запланованих кінематичних функцій передачі, і виведемо залежності, які описують їх. Ці залежності дозволяють сформулювати умови, які повинні задовольняти вибрані значення , і , щоб вказані явища були відсутні, тобто сформулювати умови існування передачі.
До таких умов належать:
1) Забезпечення плавності роботи зубчастої передачі;
2) Усунення підрізання зубів;
3) Усунення загострення зубів;
4) усунення інтерференції зубів.
Коефіцієнт перекриття
Плавність
роботи зубчастої передачі характеризується
коефіцієнтом перекриття. Для його
визначення розглянемо пару зубчастих
коліс, які перебувають у зачепленні.
Нехай зубчасті колеса обертаються так,
як показано на рис. 19.3 Зуби при цьому
будуть стикатися між собою по загальній
нормалі NN,
проведеній
через точки контакту зубів. Причому
зуби входять у контакт у точці
![]() ,
а виходять з контакту у точці
,
а виходять з контакту у точці
![]() .
Ці два положення бічних профілів
зубів зображено на рисунку: для шестірні
— лініями 1, для колеса — лініями 2.
Лінія NN
називається лінією зачеплення. Частину
цієї лінії між точками дотику
.
Ці два положення бічних профілів
зубів зображено на рисунку: для шестірні
— лініями 1, для колеса — лініями 2.
Лінія NN
називається лінією зачеплення. Частину
цієї лінії між точками дотику
![]() і
і
![]() з
основними колами, як уже відомо, називають
теоретичною лінією зачеплення, а відрізок
з
основними колами, як уже відомо, називають
теоретичною лінією зачеплення, а відрізок
![]() ,
що відсікається від лінії зачеплення
колами виступів, активною лінією
зачеплення. Активна
лінія зачеплення є геометричним місцем
точок контакту двох спряжених профілів.
За межами лінії
,
що відсікається від лінії зачеплення
колами виступів, активною лінією
зачеплення. Активна
лінія зачеплення є геометричним місцем
точок контакту двох спряжених профілів.
За межами лінії
![]() контакт між зубами відсутній, оскільки
він лежить за межами габаритів зубчастих
коліс. Чим більша довжина активної лінії
зачеплення відносно кроку евольвентного
зачеплення
контакт між зубами відсутній, оскільки
він лежить за межами габаритів зубчастих
коліс. Чим більша довжина активної лінії
зачеплення відносно кроку евольвентного
зачеплення
![]() ,
тим вища плавність роботи передачі.
,
тим вища плавність роботи передачі.
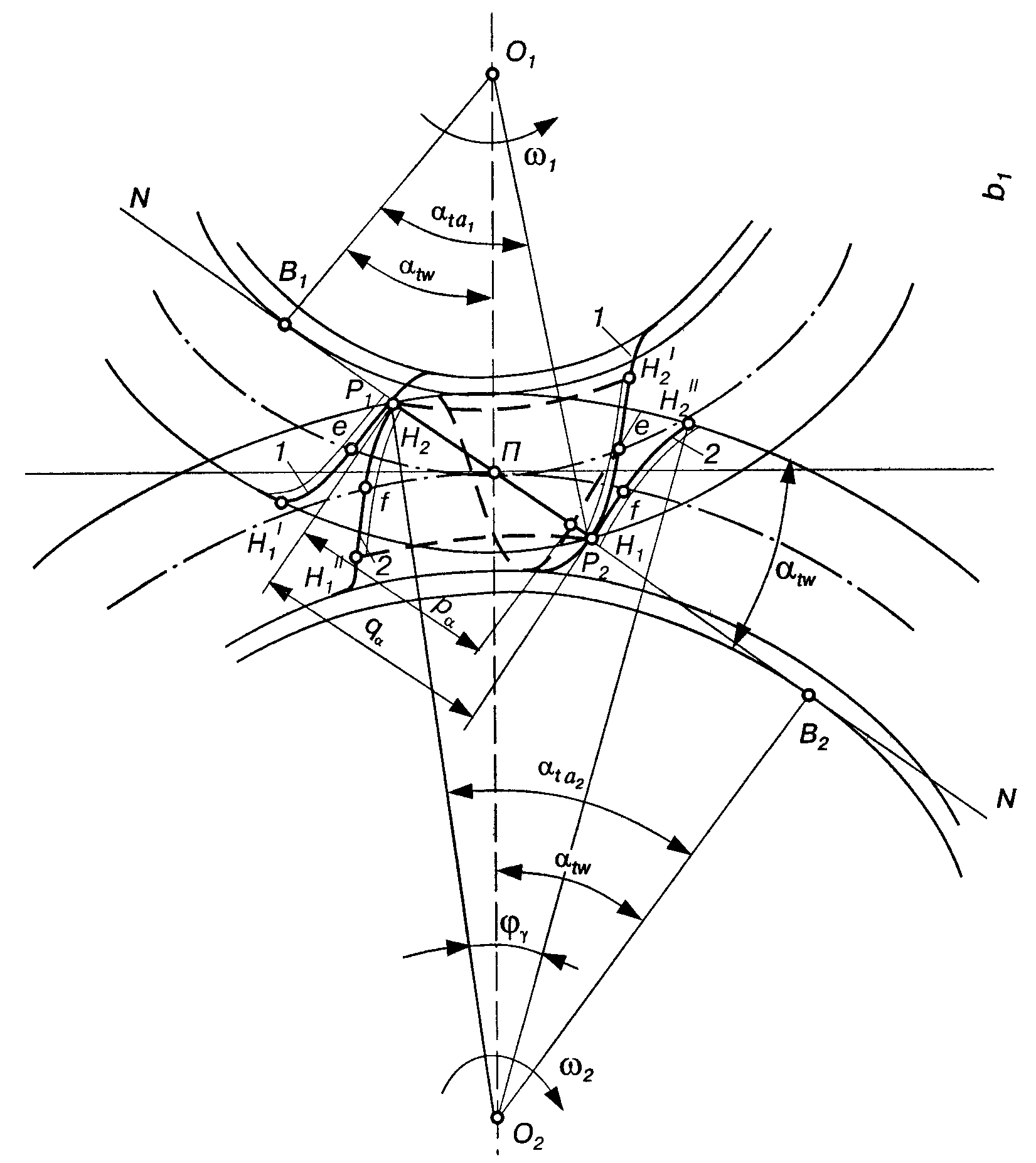
Рис. 19.3
Під
кроком
евольвентного зачеплення
розуміють відстань між двома контактними
точками однойменних головних профілів
двох сусідніх зубів.
Оскільки однойменні профілі двох
сусідніх зубів є еквідистантними
кривими, відстань між якими визначається
основним коловим кроком
![]() ,
маємо:
,
маємо:
![]() (19.1)
(19.1)
Точки
![]() і
визначають також величину
активного
(робочого) профілю
зубів.
Оскільки за межами лінії
контакту між зубами коліс немає, точка
є найближчою до центра обертання
точкою контакту профілю зуба шестірні,
а найвіддаленішою від центра
,
є точка
.
Отже, частина бічного профілю зуба
шестірні
і
визначають також величину
активного
(робочого) профілю
зубів.
Оскільки за межами лінії
контакту між зубами коліс немає, точка
є найближчою до центра обертання
точкою контакту профілю зуба шестірні,
а найвіддаленішою від центра
,
є точка
.
Отже, частина бічного профілю зуба
шестірні
![]() є
активною,
у колеса активним є профіль
є
активною,
у колеса активним є профіль
![]() (на
рис. 19.3 активні профілі зубів позначені
подвійними лініями).
Характерно, що довжина активного профілю
на головці зуба більша, ніж на спряженій
ніжці зуба (
(на
рис. 19.3 активні профілі зубів позначені
подвійними лініями).
Характерно, що довжина активного профілю
на головці зуба більша, ніж на спряженій
ніжці зуба (![]() ).
Нерівності ділянок профілів, які
проходять контактні точки ніжки та
головки зуба за однакові проміжки
часу (у полюсі зачеплення П
точки
).
Нерівності ділянок профілів, які
проходять контактні точки ніжки та
головки зуба за однакові проміжки
часу (у полюсі зачеплення П
точки
![]() і
і
![]() збігаються), вказує на наявність
відносного ковзання зубів, причому
ніжка зуба перебуває у більш напруженому
стані і більше спрацьовується.
збігаються), вказує на наявність
відносного ковзання зубів, причому
ніжка зуба перебуває у більш напруженому
стані і більше спрацьовується.
Плавність
робота зубчастої передачі
характеризується повним коефіцієнтом
перекриття,
під яким розуміють відношення кута
перекриття
![]() до кутового кроку
до кутового кроку
![]() ,
тобто
,
тобто
![]() (19.2)
(19.2)
де
—
кут перекриття;
![]() —
центральний кут зубчастого колеса, що
відповідає кроку зубчастого колеса.
—
центральний кут зубчастого колеса, що
відповідає кроку зубчастого колеса.
Кутом
перекриття
називають кут повороту зубчастого
колеса від положення входу зуба у
зачеплення до його виходу із зачеплення.
Для колеса прямозубої циліндричної
передачі (рис. 19.3)
![]() ,
у косозубих передачах цей кут буде
більшим від
,
у косозубих передачах цей кут буде
більшим від
![]() за рахунок нахилу зубів на кут
.
за рахунок нахилу зубів на кут
.
Практично
коефіцієнт
перекриття показує число пар зубів, що
перебувають одночасно у зачепленні.
Наприклад, якщо
![]() ,
то зачеплені між собою одночасно одна
або дві пари зубів, причому дві пари (
,
то зачеплені між собою одночасно одна
або дві пари зубів, причому дві пари (![]() >
1)
— 57 % часу, одна пара — 43 %.
>
1)
— 57 % часу, одна пара — 43 %.
Коефіцієнт
перекриття повинен бути більшим від
одиниці, Інакше порушується плавність
роботи передачі (співудари зубів, контакт
кромками вершин). Чим вищий коефіцієнт
перекриття, тим плавніше працює зубчаста
передача, тим більша її несуча здатність.
Внаслідок можливої неточності монтажу
та спрацювання зубів коефіцієнт
перекриття може виявитися меншим за
розрахунковий, тому рекомендується
вибирати мінімальним коефіцієнт
перекриття
![]() .
.
Коефіцієнт
перекриття
![]() можна також виразити як відношення дуги
зачеплення
можна також виразити як відношення дуги
зачеплення
![]() до колового кроку
до колового кроку
![]() ,
тобто
,
тобто
![]() .
Зрозуміло, що для забезпечення плавної
роботи передачі дуга зачеплення
повинна бути більша від кроку (
.
Зрозуміло, що для забезпечення плавної
роботи передачі дуга зачеплення
повинна бути більша від кроку (![]() ).
).
Дугами зачеплення називають частину початкових кіл, які перекочуються одна по одній за час контакту пари зубів. Взагалі кажучи, дугу зачеплення і коловий крок можна знаходити на будь-якому іншому колі зубчастих коліс (вершин, ділильному, основному тощо).
Картину
зачеплення у рейковому та внутрішньому
зачепленнях зображено на рис. 19.4. На
рис. 19.3 і 19.4 дуги зачеплення позначені
для шестірні літерами ее,
колеса (рейки) -
![]() .
Дуга перекриття у косозубих зубчастих
передачах більша, ніж у прямозубих, на
величину
.
Дуга перекриття у косозубих зубчастих
передачах більша, ніж у прямозубих, на
величину
![]() .
Це видно з розгортки початкової поверхні
косозубого колеса (рис. 19.4,в),
на якій зображені лінії зубів на початку
.
Це видно з розгортки початкової поверхні
косозубого колеса (рис. 19.4,в),
на якій зображені лінії зубів на початку
![]() і в кінці
і в кінці
![]() контакту пари зубів.
контакту пари зубів.
Повний
коефіцієнт перекриття
є сумою торцевого коефіцієнта
перекриття
![]() й осьового коефіцієнта перекриття
й осьового коефіцієнта перекриття
![]() ,
тобто
,
тобто
![]() (19.3)
(19.3)
Торцевим коефіцієнтом перекриття називають відношення довжини активної лінії зачеплення до кроку евольвентного зачеплення, тобто:
![]() (19.4)
(19.4)
Довжина активної лінії зачеплення визначається з рис. 1:

Остаточно:
![]() (19.5)
(19.5)
Підставивши
значення
![]() (9.67),
(9.63) у відношення (9.66), одержимо залежність
для визначення коефіцієнта торцевого
перекриття:
(9.67),
(9.63) у відношення (9.66), одержимо залежність
для визначення коефіцієнта торцевого
перекриття:
![]() (19.6)
(19.6)
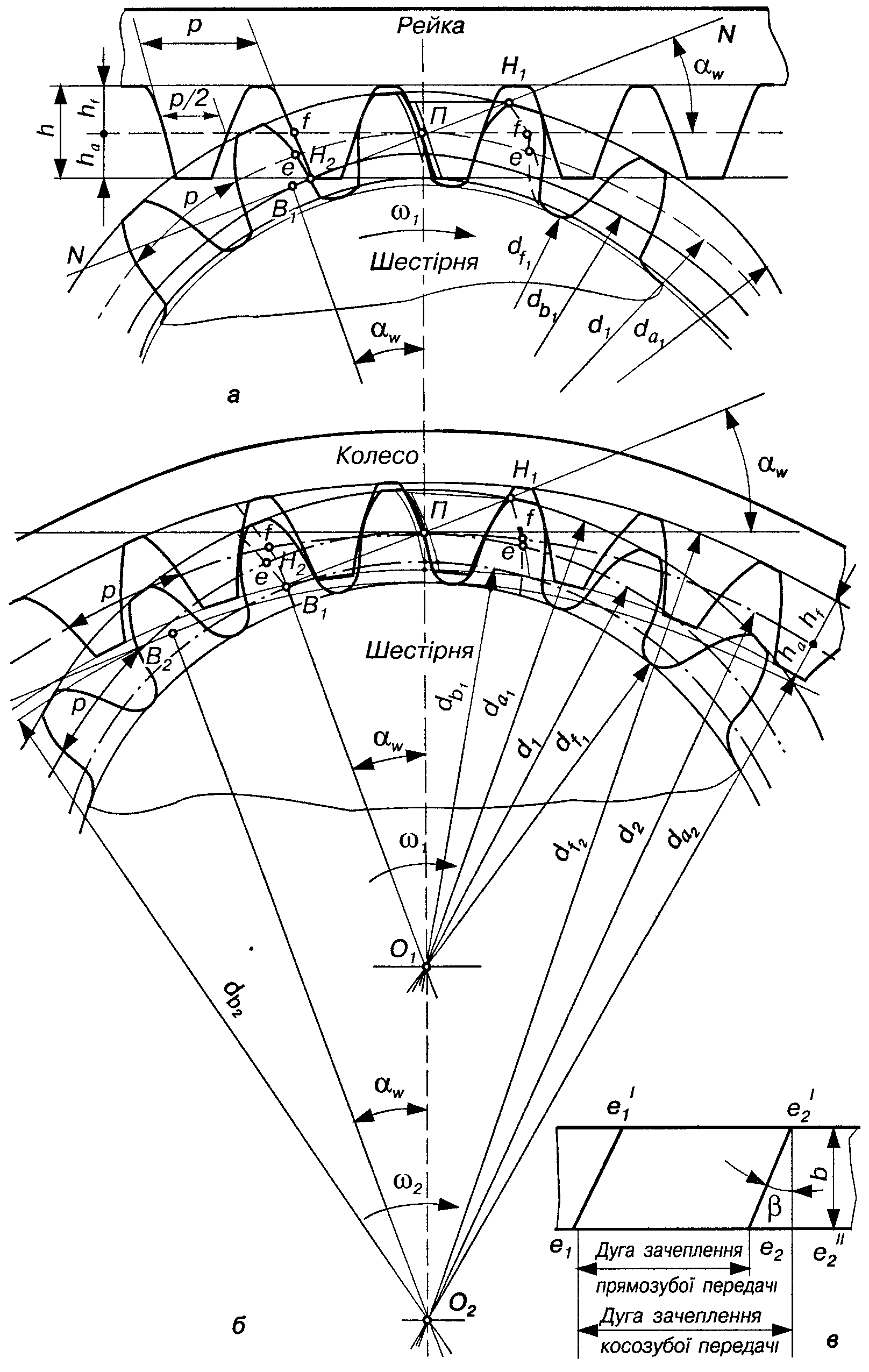
Рис. 19.4