

Лекція 15 зубчасті механізми з рухомими осями коліс
У деяких багатоланкових зубчастих передачах осі окремих коліс є рухомими. Такі зубчасті механізми (рис. 15.1) з одним ступенем вільності називають планетарними механізмами, а з двома і більше ступенями вільності — диференціальними механізмами, або просто диференціалами.
Колеса
з рухомими осями обертання називаються
планетарними колесами або сателітами,
а ланка, на якій розміщена вісь сателітів,
— водилом.
На схемах водило прийнято позначати
літерою
![]() .
Зубчасті
колеса з нерухомими осями обертання
називаються сонячними
або центральними.
.
Зубчасті
колеса з нерухомими осями обертання
називаються сонячними
або центральними.
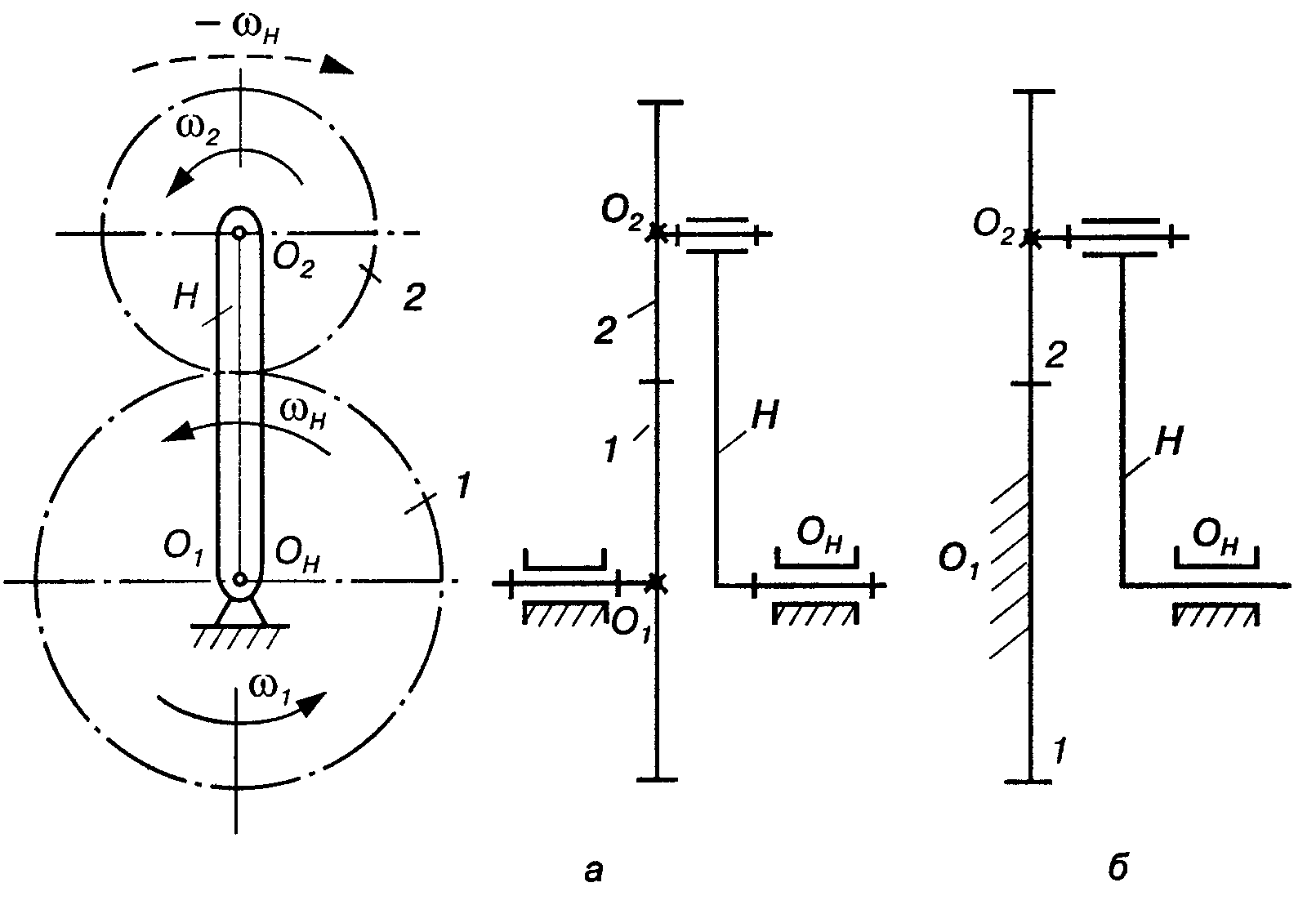
Рис. 15.1
Диференціальні механізми
На
рис. 15.1,а
зображено в двох проекціях найпростіший
диференціальний механізм, в якому колесо
1
є центральним, колесо 2
—
сателітом, а ланка
![]() —
водилом. Нехай колеса 1,
2
і водило
обертаються з кутовими швидкостями
—
водилом. Нехай колеса 1,
2
і водило
обертаються з кутовими швидкостями
![]() і
і
![]() .
.
Визначимо
число ступенів вільності механізму, в
якому число рухомих ланок п
== 3, число обертових пар п'ятого класу
![]() .
Це пари
і
в які входять відповідні ланки: 0-1, 2-
,
.
Це пари
і
в які входять відповідні ланки: 0-1, 2-
,
![]() ,
де 0 — стояк. Зубчасті колеса 1
і 2
утворюють вищу пару четвертого класу
(
,
де 0 — стояк. Зубчасті колеса 1
і 2
утворюють вищу пару четвертого класу
(![]() ).
Отже, за структурною формулою для плоских
механізмів число ступенів вільності
диференціального механізму:
).
Отже, за структурною формулою для плоских
механізмів число ступенів вільності
диференціального механізму:
![]()
Таким
чином, для визначеності руху механізму
він повинен мати заданими закони руху
двох ланок, тобто мати дві узагальнені
координати. Взагалі кажучи, вибір цих
двох ланок може бути довільним. Наприклад,
можна задати закони руху ланок 1
і Н,
тобто закони зміни кутів повороту
![]() і
і
![]() ланок 1
і Н.
Тоді, очевидно, кут повороту ерг ланки
2
буде функцією цих кутів:
ланок 1
і Н.
Тоді, очевидно, кут повороту ерг ланки
2
буде функцією цих кутів:
![]()
Для
визначення передаточних відношень
диференціального механізму не можна
безпосередньо скористатися формулами
для зубчастих механізмів з нерухомими
осями. Для
виведення залежності між кутовими
швидкостями ланок диференціального
механізму та числом зубів зубчастих
коліс використаємо метод оборотності
(інверсії) руху, який полягає в тому, що
всім ланкам механізму надаємо
додаткової кутової швидкості навколо
осі
![]() з
кутовою швидкістю
—
,
яка
дорівнює кутовій швидкості
водила
Н
за
величиною, але протилежна їй за напрямом.
При цьому відносний рух ланок не
зміниться. Тоді ланки механізму матимуть
кутові швидкості: зубчасте колесо 1
-
з
кутовою швидкістю
—
,
яка
дорівнює кутовій швидкості
водила
Н
за
величиною, але протилежна їй за напрямом.
При цьому відносний рух ланок не
зміниться. Тоді ланки механізму матимуть
кутові швидкості: зубчасте колесо 1
-
![]() ;
колесо 2
-
;
колесо 2
-
![]() ;
водило Н
-
;
водило Н
-
![]() .
Отже,
після надання ланкам механізму додаткового
обертання з кутовою швидкістю —
ланка Н
буде нерухомою, і диференціал
перетвориться в звичайний зубчастий
механізм з нерухомими осями
.
Отже,
після надання ланкам механізму додаткового
обертання з кутовою швидкістю —
ланка Н
буде нерухомою, і диференціал
перетвориться в звичайний зубчастий
механізм з нерухомими осями
![]() і
і
![]() .
Передаточне відношення такого механізму
визначається формулою (11.5) або (11.7). У
даному випадку
.
Передаточне відношення такого механізму
визначається формулою (11.5) або (11.7). У
даному випадку

Тут і далі, щоб знати, при якій нерухомій ланці визначено конкретне передаточне відношення, біля його позначення в дужках ставитимемо верхній індекс тієї ланки, яка взята за нерухому.
Формула (11.9) називається формулою Вілліса для диференціального механізму. Цю формулу можна одержати диференціюванням формули (11.8).
У загальному вигляді при будь-якій кількості коліс формула Вілліса записується так:
![]()
де — кількість пар зовнішнього зубчастого зачеплення.
Формула
Вілліса встановлює математичну залежність
між кутовими швидкостями ланок механізму
і числами зубів коліс.
Маючи заданими кутові швидкості
яких-небудь двох ланок, наприклад
![]() ,
,
![]() і числа зубів коліс, можна визначити
кутову швидкість третьої ланки
і числа зубів коліс, можна визначити
кутову швидкість третьої ланки
![]() .
Враховуючи, що
.
Враховуючи, що
![]() ,
у формулах
(11.9), (11.10) замість
,
у формулах
(11.9), (11.10) замість
![]() ,
можна записати
,
можна записати
![]() ,
де
—
кількість
обертів ланки за хвилину.
,
де
—
кількість
обертів ланки за хвилину.
Диференціальні механізми широко використовуються в автомобілях, лічильних, сільськогосподарських машинах, металорізальних верстатах тощо.