

Аналітичний спосіб
Для
побудови теоретичного профілю кулачка
аналітичним способом необхідно визначити
полярні координати точки В
профілю кулачка (рис. 22.2), тобто радіус
![]() і кут
і кут
![]() .
Кут
задають, а радіус
.
Кут
задають, а радіус
![]() ,
обчислюють за такою очевидною
формулою:
,
обчислюють за такою очевидною
формулою:
![]() (22.1)
(22.1)
де
![]() визначається законом руху штовхача;
для знаходження інваріантів переміщень
використовують залежності, наведені
в довідкових таблицях.
визначається законом руху штовхача;
для знаходження інваріантів переміщень
використовують залежності, наведені
в довідкових таблицях.
Зміщений кулачковий механізм з роликовим штовхачем Графічний спосіб
Послідовність побудови теоретичного профілю кулачка таких механізмів аналогічна. Різниця лише в тому, що:
1) лінія руху штовхача (рис. 22.3) зміщена відносно центра обертання кулачка на е, а тому всі положення штовхача в оберненому русі дотичні до кола радіуса е;
2)
фазові кути треба відкладати від лінії
![]() оскільки вони не дорівнюють кутам
профілю
оскільки вони не дорівнюють кутам
профілю
![]()
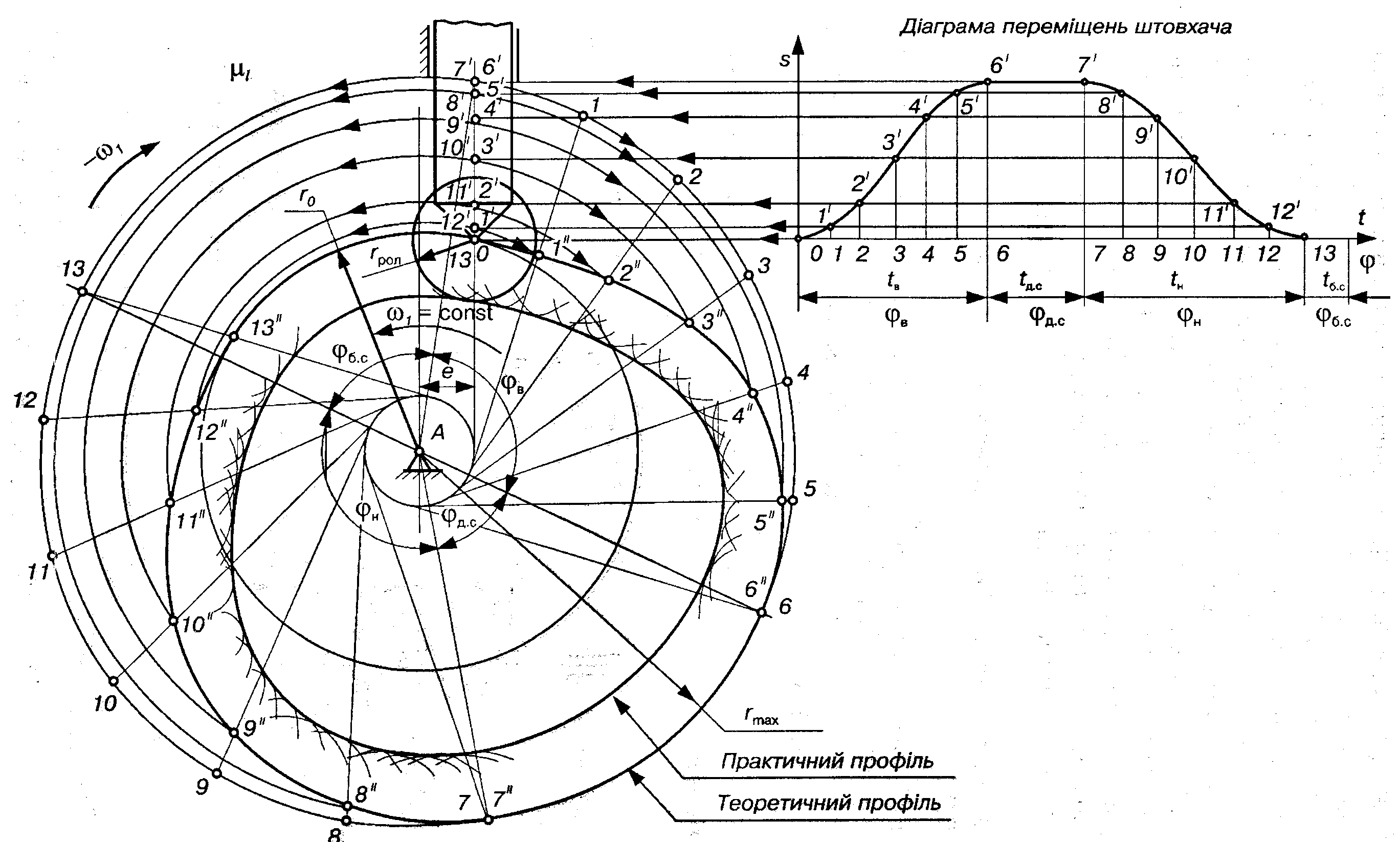
Рис. 22.3
Аналітичний спосіб
Полярні координати теоретичного (центрового) профілю кулачка обчислюються за формулами, які випливають з рис. 22.4:

Знак зміщення е вважається додатним, якщо напрямок швидкості штовхача при його віддаленні утворює гострий кут з напрямком швидкості точки контакту на кулачку.
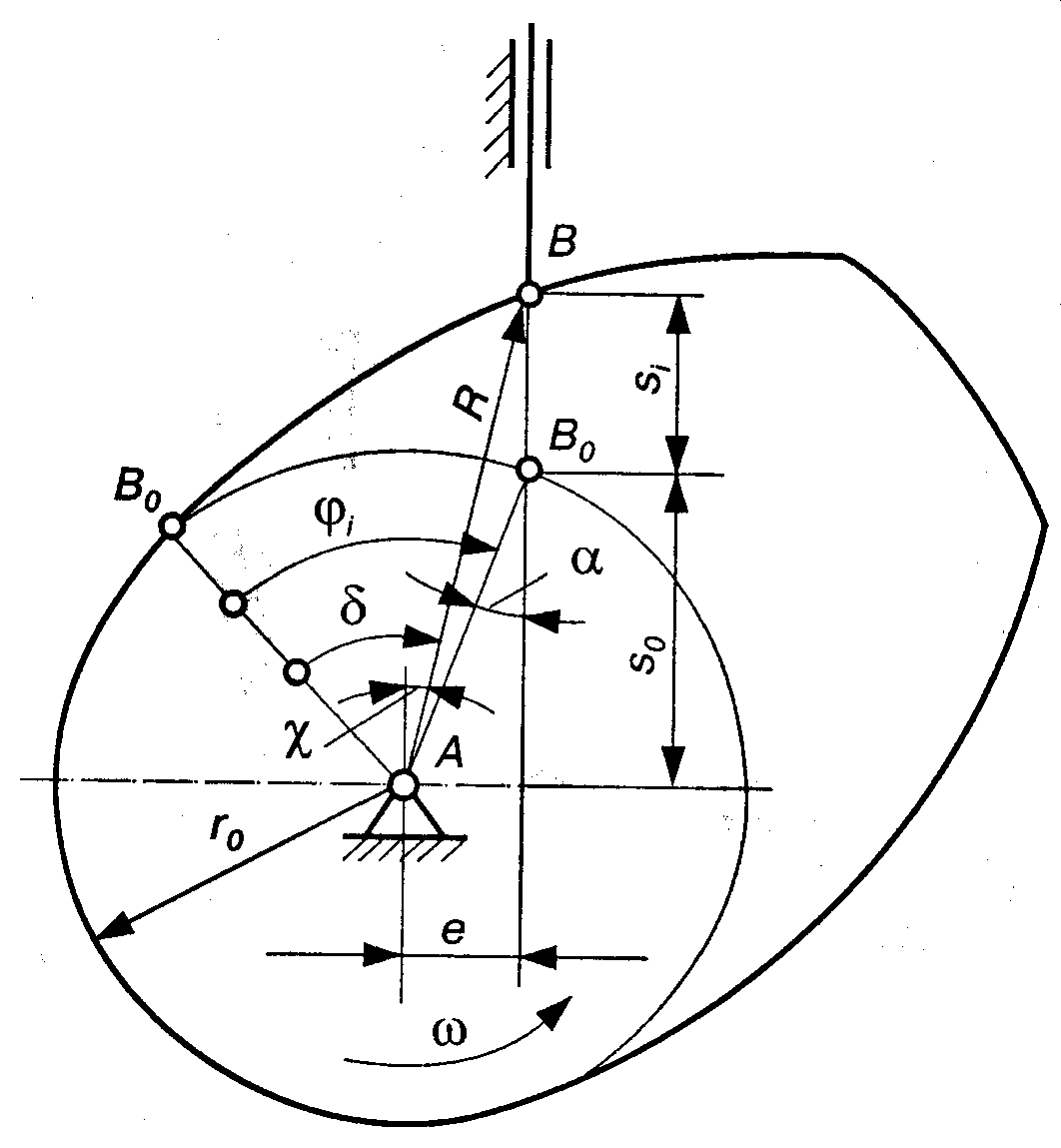
Рис. 22.4
Кулачковий механізм з роликовим коромислом Графічний спосіб
Побудова теоретичного (центрового) профілю такого механізму здійснюється, як і в попередніх випадках, на основі методу оберненого руху. Послідовність побудови така (рис. 22.5, в).
1.
Будуємо
![]() ,
сторони якого задані (
,
сторони якого задані (![]() — мінімальний радіус теоретичного
профілю кулачка;
— мінімальний радіус теоретичного
профілю кулачка;
![]() — міжосьова
відстань;
— міжосьова
відстань;
![]() — довжина коромисла).
— довжина коромисла).
2. З центра А будуємо мінімальним радіусом ro основне коло, а радіусом АС0 — траєкторію точки С в оберненому русі.
3.
Від лінії АС0
в протилежному напрямку обертання
кулачка відкладаємо фазові кути руху
коромисла:
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
4.
Від лінії В0С0
відкладаємо максимальний кут розмаху
![]() коромисла і проводимо траєкторію точки
В
у дійсному русі.
коромисла і проводимо траєкторію точки
В
у дійсному русі.
5.
Розмічаємо дугу
![]() відповідно до заданої діаграми кутових
переміщень
= ()
(рис. 22.5, а),
тобто ділимо її на шість частин,
пропорційно значенням кутів
відповідно до заданої діаграми кутових
переміщень
= ()
(рис. 22.5, а),
тобто ділимо її на шість частин,
пропорційно значенням кутів
![]() ,
,
![]() ,
,
![]() і т. д., де відрізки 11',
22', 33'
і т. д. — ординати на діаграмі переміщень
= ();
і т. д., де відрізки 11',
22', 33'
і т. д. — ординати на діаграмі переміщень
= ();
![]() — масштаб, в якому відкладено на діаграмі
= ()
кути повороту коромисла. Такий спосіб
знаходження положення точки В
досить незручний, оскільки, по-перше,
треба обчислити всі кути
— масштаб, в якому відкладено на діаграмі
= ()
кути повороту коромисла. Такий спосіб
знаходження положення точки В
досить незручний, оскільки, по-перше,
треба обчислити всі кути
![]() ,
а по-друге, малі кути важко відкладати.
,
а по-друге, малі кути важко відкладати.
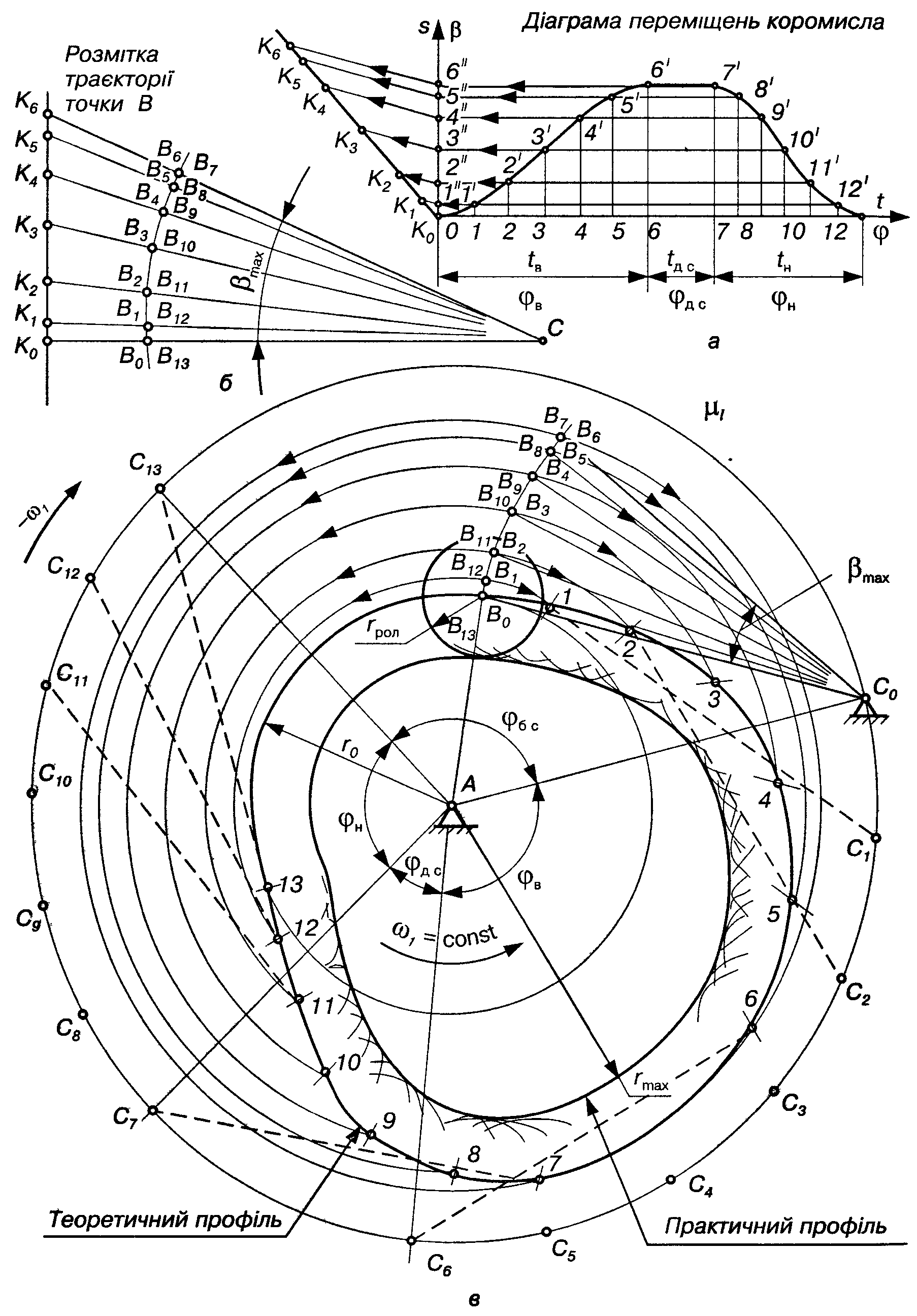
Рис. 22.5
Для спрощення розмітки траєкторії точки В зручно виконати таку побудову. На продовженні лінії С0В0 (рис. 22.5, б) беремо довільну точку K0, через яку проводимо перпендикуляр до лінії В0С0. Відклавши кут , продовжуємо лінію CB6 до перетину з перпендикуляром, проведеним через точку К0, і одержимо точку К6.
На
лінії К0К6
можна відкласти відрізки К0Кi,
які будуть пропорційні відповідним
кутам повороту коромисла ВС,
оскільки
![]() ,
де
,
де
![]() ,
,
![]() ,
а уi
—
ордината діаграми переміщень (i
=
0, 1, 2, ...).
,
а уi
—
ордината діаграми переміщень (i
=
0, 1, 2, ...).
Промені СКi зображують миттєві положення коромисла, які відповідають заданому закону руху, а точка перетину Вi цих променів з дугою В0В6 визначають положення центра ролика. Довжину відрізків К0Кi можна визначити також графічно методом пропорційного ділення, як це зображено на рис. 22.5, а.
6. Будуємо положення коромисла ВС в оберненому русі. Для цього надаємо всьому кулачковому механізму кутову швидкість (–1), при цьому кулачок стане нерухомим, а коромисло ВС разом із стояком буде обертатися навколо кулачка. Щоб знайти положення коромисла в цьому русі, ділимо кути віддалення і наближення на стільки частин, на скільки вони поділені на діаграмі = () (на рис. 22.5, в поділено на шість частин кожний). Центр обертання коромисла в оберненому русі займатиме відповідно положення С1, С2, С3 т. д/
7.
Знаходимо положення центра ролика В
в оберненому русі методом засічок,
оскільки відстані від точки В
до центрів обертання кулачка і
коромисла визначаються відповідно
відрізками АВi
і BiCi
= соnst. Отже, з центра обертання кулачка
А
проводимо дугу, наприклад, радіусом АВ1
а з точки С1
— дугу радіусом С11
= BС.
Тоді точка 1
визначатиме положення центра ролика В
у першому положенні оберненого руху.
Аналогічно знаходимо положення точки
В
в інших положеннях механізму. Деякі
положення коромисла в оберненому
русі зображені штриховими лініями.
Максимальний радіус
![]() центрового профілю кулачка визначається
радіусом AB6.
центрового профілю кулачка визначається
радіусом AB6.
8. Так само, як і раніше, будуємо практичний профіль кулачка, побудувавши положення ролика в оберненому русі.