

35.Приведение системы сил к центру. Теорема о параллельном переносе сил.
Теорема
о моменте равнодействующущая![]() ,
,
![]() ,.
. . ,
,.
. . ,
![]() ,
(12)
,
(12)
приложенных
в центре О, и система пар, моменты которых
согласно равны:![]() ,
,
![]() ,……..,
,……..,![]() (13)
(13)
Сходящиеся
силы, приложенные в точке О, заменяются
одной силой
,
приложенной в точке О. При этом
![]() или,
или,
![]()
Как известно,
величина
,
равная геометрической сумме всех сил,
называется главным вектором системы
сил; величина
![]() ,
равная геометрической сумме моментов
всех сил относительно центра О,
называется главным моментом системы
сил относительно этого центра.
,
равная геометрической сумме моментов
всех сил относительно центра О,
называется главным моментом системы
сил относительно этого центра.
Теорема о моменте равнодействующей
Для равновесия любой системы сил необходимо и достаточно, чтобы главный вектор этой системы сил и ее главный момент относительно любого центра были равны нулю, т. е. чтобы выполнялись условия
![]() ,
,![]() (14) где О – любой центр.
(14) где О – любой центр.
Теорема Вариньона о моменте равнодействующей: если данная система сил имеет равнодействующую, то момент равнодействующей относительно любого центра О равен сумме моментов сил системы относительно того же центра.
36..Плоская система сил. Приведение плоской системы сил к простейшему виду. Равновесие плоской системы сил.
1. Алгебраические моменты силы и пары
1).
Алгебраический
момент силы относительно центра.
Алгебраический момент силы F относительно
центра О равен взятому с соответствующим
знаком произведению модуля силы на ее
плечо,т.е![]()
2). Алгебраический момент пары.
Алгебраический
момент пары равен взятому с соответствующим
знаком произведению модуля одной из
сил пары на плечо пары:
![]() .
(16)
.
(16)
2Приведение плоской системы сил к простейшему виду
Плоская
система сил тоже приводится к силе,
равной
и приложенной в произвольно выбранном
центре О, и паре с моментом Мо,
но сила и пара лежат в данном случае в
одной плоскости – в плоскости действия
сил (рис. 16, а), где пара изображена дуговой
стрелкой).
![]() (17)
(17)
![]()
Равновесие плоской системы сил.
1. Основная форма условий равновесия. Так как вектор равен нулю, когда равны нулю его проекции Rх и Rу, то для равновесия должны выполняться равенства Rх =0, Rу =0 и М0 =0, где в данном случае Мо — алгебраический момент, а О — любая точка в плоскости действия сил. Тогда
![]() ,
(18)
,
(18)
2.Вторая
форма условий равновесия :
![]() (19)
(19)
3. Третья форма условий равновесия (уравнения трех моментов):
![]() .
(20)
.
(20)
Равновесие плоской системы параллельных сил. В случае, когда все действующие на тело силы параллельны друг другу, можно направить ось Ох перпендикулярно силам, а ось Оу параллельно им.
Д ваусловияравновесия
ваусловияравновесия![]() осьОу
параллельна силам.
осьОу
параллельна силам.
37.Трение. Законы трения скольжения. Реакции шероховатых связей. Угол
трения. Трения качения. Трение возникает между двумя соприкасающимися телами. На горизонтальный стол положим тело весом Р. Нормальная реакция стола N уравновешивает силу P , т.е. N=P.
Прикрепим к телу нить и перекинем ее через блок, а к другому концу подвесим чашку и будем класть туда гири (рис. 16.3). До определенного веса гирь тело остается в покое. Это значит, что реакция нити Q уравновешивается некоторой горизонтальной силой Fтр, возникающей между поверхностью стола и телом и направленной противоположно силе Q , т.е. Fтр=Q. Эта сила сцепления называется силой трения скольжения.
Сила, препятствующая скольжению одного тела по поверхности другого, называется силой трения скольжения..
С
увеличением силы Q
будет возрастать и сила статического
трения скольжения Fт
0![]() <
Fтр<
Fпр
(25)
<
Fтр<
Fпр
(25)
Для определения силы трения скольжения, если не требуется высокой точности, в технике пользуются законами трения скольжения Кулона.
1. Максимальная величина силы статического трения пропорциональна нормальному давлению одного тела на другое.
Fпр=f·N, (26)
2. Статистический коэффициент трения скольжения не зависит от размера трущихся поверхностей.
3. Статистический коэффициент трения скольжения зависит от материала трущихся тел и размеров их поверхностей.
Сила динамического трения скольжения, согласно законам Кулона, вычисляется по формуле, аналогичной (26), то есть, пропорциональна нормальному давлению:
Fдин = fдин·N,

Динамический
коэффициент трения скольжения вычисляется
аналогично статическому![]()
.
Опытным путем доказано, что fдин < f.
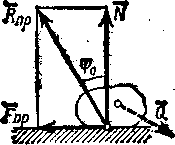
. Реакции шероховатых связей. Угол трения
Реакция
реальной связи слагается из двух
составляющих: из нормальной реакции
![]() и перпендикулярной ей силы трения
.
Следовательно, полная реакция
будет отклонена от нормали к поверхности
на некоторый угол.
и перпендикулярной ей силы трения
.
Следовательно, полная реакция
будет отклонена от нормали к поверхности
на некоторый угол.
Наибольший угол j0 , который полная реакция шероховатой связи образует с нормалью к поверхности, называется углом трения.
![]()


Так
как F
£
f0
N,
то отсюда находим следующую связь между
углом трения в коэффициентом трения
![]() (27)
(27)
Равновесие тел при наличии трения
Изучение равновесия тел при наличии трения сводится обычно к рассмотрению предельного положения равновесия, когда сила трения (при качении - момент трения) достигает своего наибольшего значении. В этом случае реакцию шероховатой связи изображают двумя составляющими N и Fпр, где Fпр = fN, а при трении качения еще добавляют момент пары трения качения Мmax = δN. Затем составляют обычные уравнения равновесия статики и, решая полученные уравнения, находят неизвестные величины.
Трением качения называется сопротивление, возникающее при качении одного тела по поверхности, другого.
Рассмотрим круглый цилиндрический каток радиуса R и веса Р, лежащий на горизонтальной шероховатой плоскости.