

Тема 7. Динамика приводов. Выбор типа приводов
Основные понятия. Любая современная машина имеет рабочие органы и их привод.
Привод – система, состоящая из двигателя и связанных с ним устройств для приведения в движение одного или нескольких твердых тел, входящих в состав машины.
Конструкция и вид рабочих органов определяются целевым назначением машины. Структурная схема привода включает двигатель того или иного типа и передачу (трансмиссию). Последняя служит для передачи энергии двигателя к рабочему органу и может быть механической, электрической, гидравлической, пневматической, комбинированной.
Рациональное проектирование приводов общего назначения должно способствовать снижению их массы, габаритных размеров, повышению коэффициента полезного действия и надежности.
По числу двигателей различают: групповой, однодвигательный и многодвигательный.
Групповой привод – привод, при котором от одного двигателя посредством механических передач приводится в движение несколько отдельных механизмов. Групповой привод имеет низкий кпд, громоздок и сложен по конструкции.
Однодвигательный привод – наиболее распространенный привод, особенно при использовании электродвигателей. Каждая машина снабжается индивидуальным приводом.
Многодвигательный – привод, в котором отдельные механизмы одной и той же машины приводятся в движение от отдельных двигателей. Он используется в накопительных механизмах строительных, путевых, грузоподъемных, транспортных и др. машин и станочного оборудования и включает электродвигатели и гидромоторы.
По типу двигателей различают: электрические приводы, приводы с двигателями внутреннего сгорания, с паровыми двигателями, гидродвигатели, пневмодвигатели.
Приводы могут иметь следующие типы передач: цилиндрические и конические, зубчатые, волновые, червячные, планетарные, комбинированные, ременные, цепные, гидродинамические, «винт – гайка».
Тип двигателя выбирается с учетом ряда факторов:
назначение механизма или машины, для которой проектируется данный привод;
наличие того или иного источника энергии;
величина потребной мощности;
ограничения по массе, габаритным размерам и условиям работы привода;
режим работы привода и обеспечения соответствующей механической характеристики.
Электропривод. Электропривод – привод с электрическим двигателем. Наличие электроэнергии предопределяет выбор электропривода как наиболее надежного. Выбранный двигатель должен удовлетворять следующим условиям:
должен обеспечивать момент, достаточный для разгона механизма с заданным ускорением, а при торможении двигателя – замедления заданной величины;
при работе в заданном режиме не должен испытывать длительных перегрузок, ведущих к перегреву электродвигателя.
Мощность электродвигателя всегда относят к определенному режиму работы. Различают три номинальных режима работы электродвигателя: продолжительный, кратковременный и повторно-кратковременный.
Рассмотрим разбивку передаточного числа механических редукторов (рис. 3.3.31), определение момента и мощности на элементах передачи.
Разбивка передаточного отношения по отдельным передачам и их ступеням производится после составления кинематической схемы передачи в целом:
Uобщ = U1U2U3 … Un,
где Uобщ – общее передаточное отношение передачи;
U1, U2, ..., Un – передаточные отношения ступеней 1, 2, …, n-ой передач.
Р азбивку
передаточного отношения привода между
передачами разных типов, а также ступенями
однотипных передач выполняют на основе
технико-экономических расчетов.
азбивку
передаточного отношения привода между
передачами разных типов, а также ступенями
однотипных передач выполняют на основе
технико-экономических расчетов.
Если кинематическая схема состоит из последовательно соединенных передач, то нагрузки и скорости для каждого последующего вала (см. рис. 3.3.31), начиная от вала двигателя, определяются по следующим формулам:
Р1 = Рдв,
![]() ;
;
![]() ,
,
где м – кпд муфты,
п2 – кпд подшипников 2-го вала;
![]() ,
,
где 2 – кпд первой ступени передачи и подшипников 3 вала;
![]() ,
,
![]() .
.
Аналогично находим частоту вращения на валах:
n1= nдВ = n2; n3 = n2/U1; n4 = n3/U2; n5 = n4/U3.
Крутящие моменты для каждого вала можно найти через мощность и частоту вращения:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Определим момент, нагружающий любое звено, при разгоне:
Ti = (Tc + J)Uii. (3.3.37)
Определим момент, нагружающий любое звено, при торможении
![]() ,
(3.3.38)
,
(3.3.38)
где Тс – статический момент, приведенный к валу двигателя (при разгоне) или к валу тормоза (при торможении);
– угловое ускорение вала двигателя или тормоза;
![]() – приведенный к валу электродвигателя
или тормоза момент инерции всех
вращающихся масс от рассматриваемого
звена до наиболее удаленного от
электродвигателя;
– приведенный к валу электродвигателя
или тормоза момент инерции всех
вращающихся масс от рассматриваемого
звена до наиболее удаленного от
электродвигателя;
Ui, i – передаточное число и кпд передачи от двигателя или тормоза до рассматриваемого звена.
С учетом характеристик двигателя выражение (3.3.37) и (3.3.38) записываются в виде
![]() ,
,
![]() ,
,
где J – приведенный к валу двигателя момент инерции всех движущихся масс;
Ти – избыточный момент на валу двигателя или тормоза, численное значение которого зависит от типа двигателя:
для асинхронного двигателя с короткозамкнутым ротором
Ти = 0,8Тп – Тс.
для асинхронного двигателя с фазовым ротором
Ти = 1,45Тn – Тс.
для двигателя внутреннего сгорания и гидродвигателя
Ти = Тдв – Тс; Тдв = 1,05Тн,
где Тн – номинальный крутящий момент;
Тп – пусковой момент:
Тп = kпТи,
где kп – коэффициент пуска, устанавливаемый из каталога на двигатели.
для двигателей внутреннего сгорания
Тдв =1,05Тн.
Рассмотрим механизм центробежного регулятора, изменяющего шаг винта самолета (рис. 3.3.32).
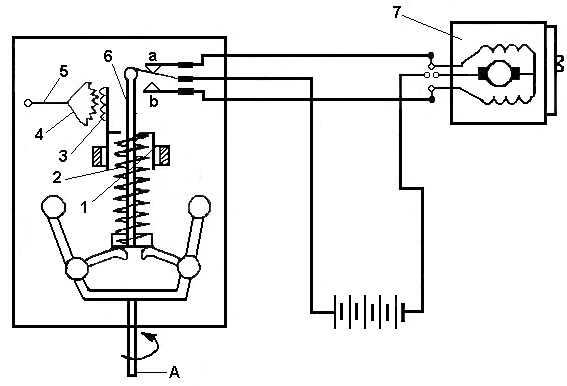
Рис. 3.3.32
Вал А центробежного регулятора приводится во вращение от авиационного двигателя. Шайба 1 пружины 2 регулятора, при помощи зубчатых рейки 3 и сектора 4, связана с рычагом управления 5, посредством которого вручную устанавливают требуемое число оборотов двигателя, изменяя предварительное нажатие пружины 2. Муфта регулятора жестко связана со штоком 6, замыкающим один из контактов для управления электромотором 7, изменяющим шаг винта. Когда двигатель имеет заданное число оборотов, шток 6 находится в среднем положении, и оба контакта разомкнуты. Когда число оборотов двигателя увеличивается, шток 6 поднимается вверх, замыкая контакт а, электромотор начинает вращаться, поворачивая лопасти и увеличивая шаг винта, что вызывает понижение числа оборотов. При понижении числа оборотов двигателя замыкается контакт b, и электромотор вращается в обратную сторону, уменьшая шаг винта.
Гидропривод. Гидропривод – совокупность гидромашин, гидроаппаратов и вспомогательных устройств, предназначенная для передачи энергии и преобразования движения посредством жидкости.
Гидроаппараты – устройства для управления потоком жидкости.
Основные гидроаппараты: гидродроссели и гидроклапаны, гидроаппараты, предназначенные для управления расходом и давлением в потоке жидкости; гидрораспределители – гидроаппараты, предназначенные для изменения направления потока жидкости.
По типу гидроприводы делят на объемные и гидродинамические (лопастные).
По характеру движения выходного звена объемные гидроприводы делят на три класса: поступательного, поворотного и вращательного движений. В соответствии с этим в качестве гидродвигателей используются гидроцилиндры, поворотные гидродвигатели и гидромоторы. Объемные гидроприводы бывают без управления и с управлением.
Существуют два основных способа управления гидроприводом: дроссельный и машинный.
Дроссельное управление заключается в том, что часть подачи насоса отводится через гидродроссель или гидроклапан на слив, минуя гидродвигатель.
М ашинное
управление осуществляется за счет
изменения рабочего объема насоса или
гидродвигателя, либо того и другого
вместе.
ашинное
управление осуществляется за счет
изменения рабочего объема насоса или
гидродвигателя, либо того и другого
вместе.
В механизме элеронов (устройство для передачи и усиления сигнала управления от штурвала к элеронам) используется гидрораспределитель и гидроцилиндр; механизм закрылка (гидроцилиндр); автопилот крена (гидрораспределитель) и т.д. Рычажный механизм управления посадочными щитками самолета (рис. 3.3.33).
Рукоятка 1 входит во вращательные пары А и В со штоком а поршня 8 и звеном 7, вращающимся вокруг неподвижной оси С. Шток b поршня 6 оканчивается роликом 9, скользящим в кулисе d щитка 10, вращающегося вокруг неподвижной оси D. При качании рукоятки 1 насос 2 засасывает жидкость из резервуара 3 и нагнетает ее в рабочий цилиндр 4. Жидкость с противоположной стороны поршня выжимается через кран 5 в резервуар 3. Поворотом крана 5 можно изменить направление движения поршня 6. Фиксирование поршня 6 и вместе с ним посадочного щитка 10 самолета в любом промежуточном положении осуществляется прекращением качания насоса и установкой крана 5 в нейтральное положение.
Пневмопривод – совокупность устройств, предназначенных для передачи энергии и преобразования движения с использованием воздушных тел (газа).
Пневмоцилиндр – устройство, преобразующее энергию потока рабочей среды (газа) в энергию поступательного движения выходного звена.
Пневмораспределитель – пневмоаппарат, предназначенный для изменения направления потока рабочей среды в двух или более пневмолиниях (трубах, рукавах, каналах) в зависимости от внешнего управляющего воздействия.
Пневмомотор аксиально-поршневой – поршневой пневмомотор, у которого оси поршней параллельны оси блока цилиндров или составляют с ней углы не более 45.
Р адиально-поршневой
пневмомотор – поршневой
пневмомотор, у которого оси поршней
перпендикулярны оси блока цилиндров
или составляют с ней углы более 45.
адиально-поршневой
пневмомотор – поршневой
пневмомотор, у которого оси поршней
перпендикулярны оси блока цилиндров
или составляют с ней углы более 45.
Рассмотрим механизм воздушного клапана аварийного торможения колес самолета (рис. 3.3.34).
При включении аварийной системы связанный с ней поршень 1, перемещаясь влево из среднего положения, воздействует скосами на концы плунжеров клапанов 7 и 3. При этом открывается клапан впуска 7, а клапан выпуска 3 закрывается под действием пружины 4. Сжатый воздух из резервуара по штуцеру 6, каналу а и штуцеру 5 поступает в цилиндры тормозов, производя торможение колес. При освобождении рукоятки пружина 2 возвращает поршень 1 в среднее положение, при котором оба клапана закрываются, оставляя колеса заторможенными. При расторможении поршень 1 перемещается вправо, клапан впуска 7 остается закрытым, а клапан выпуска 3 открывается, соединяя тормозные цилиндры с атмосферой через канал d (положение, изображенное на рис. 3.3.34).