

3.3.23. Динамическое уравновешивание вращающихся масс
После выполнения анализа возможных мер виброзащиты объекта путем воздействия на источник оценивается эффективность применения виброизоляции и демпфирования в связях, осуществляющих прохождение к нему вибрационной энергии.
Виброизоляция – классический метод виброзащиты – осуществляется путем установки в связях между источником и объектом виброизоляторов – упругих элементов, обычно заключенных в корпус. Таким способом достигаются ослабление этих связей и уменьшение потока притекающей с объекту энергии за счет изменения амплитудно-частотных характеристик системы.
Собственная частота (0) колебаний объекта на виброизоляторах выбирается такой, чтобы частоты основных гармонических составляющих процесса вибровозбуждения () лежали в зарезонансной области ( > 0), где амплитудно-частотные характеристики имеют наименьшие значения и обеспечивается значительное снижение вибрационного возбуждения объекта.
Наряду с применением упругих элементов в виде пружин здесь для демпфирования колебаний используются резиновые прокладки и поглотители сухого трения.
Вибропоглощение колебаний в связях, осуществляемое в целях демпфирования колебательной энергии, позволяет существенно уменьшать поток энергии вибровозбуждения на частотах, близких к резонансным (1 = 0). В этой области частот амплитудно-частотные характеристики имеют наивысшие значения, и при увеличении коэффициента затухания колебаний () их значения существенно уменьшаются, что обеспечивает значительное снижение вибрационного возбуждения объекта.
Демпфирование в этом случае совмещается с виброизоляцией, т. е. сам упругий элемент (например, из резины c высоким коэффициентом потерь) обеспечивает высокий коэффициент затухания вследствие больших потерь энергии на внутреннее трение в материале (рис. 3.3.24, а). При этом в виброизолятор встраивается специальное устройство, например демпфер сухого трения в виде соприкасающихся рессор (рис. 3.3.24, б) либо пневматический демпфер в виде резиновой оболочки с калиброванными отверстиями вокруг пружины (рис. 3.3.24, в). В рессорном демпфере энергия колебаний поглощается трением на соприкасающихся поверхностях рессорных пружин, а в пневматическом – сопротивлением потоков воздуха в отверстиях резиновой оболочки пружины.
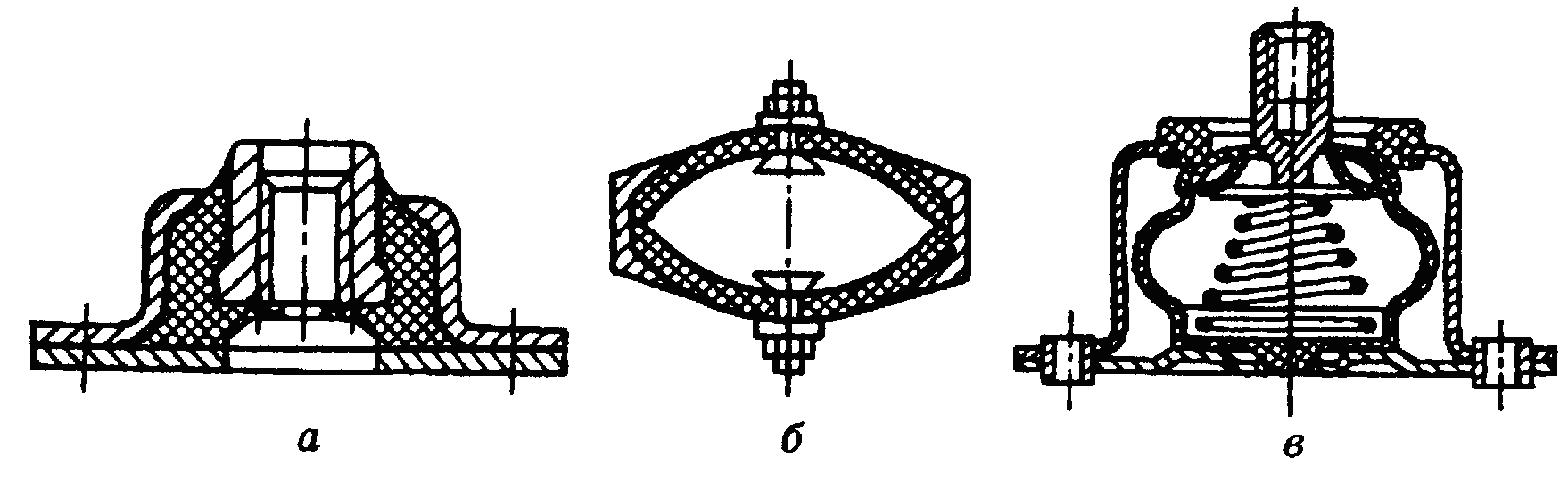
Рис. 3.3.24. Конструкция типовых виброизоляторов:
а – с резиновым упругим элементом; б – рессорный с сухим трением; в – с конической пружиной нелинейной жесткости
Когда применение описанных выше методов виброзащиты оказывается недостаточным для решения поставленной задачи, прибегают к дополнительному воздействию на объект виброзащиты в целях подавления его колебаний.
Динамическое гашение колебаний осуществляется путем присоединения к объекту специального устройства, поглощающего вибрационную энергию за счет действия на объект динамической нагрузки в противофазе с вибрационным возбуждением. При этом возможна автоматическая настройка системы объект – гаситель в требуемом диапазоне частот вибрационного возбуждения.
Пассивными называются устройства виброгашения, включающие дополнительную массу т1, упругие и диссипативные элементы. При настройке на определенную рабочую частоту, они служат для подавления гармонических или узкополосных колебаний на частоте настройки.
Для понимания сущности действия динамического виброгасителя рассмотрим объект массой т со связью жесткости с под действием гармонической силы F(t) = F0sint постоянной частоты , которая вызывает интенсивные колебания вблизи резонанса. Чтобы устранить или уменьшить эти колебания, нужно устранить возбуждающую силу или отстроить систему от резонанса, что зачастую сделать невозможно. Тогда возникает третья возможность – использовать динамический гаситель колебаний.
Динамический
гаситель колебаний состоит из малой по
сравнению с объектом массы (m
mг),
связанной с основной массой (m)
связью жесткости (с). Собственная
частота гасителя
![]() подбирается так, чтобы она была равна
частоте гармонического возбуждения .
Можно показать, что в этом случае сила
упругости R(t)
в связи поглотителя в любой момент
времени равна и противоположно направлена
действующей на объект гармонической
силе F(t):
подбирается так, чтобы она была равна
частоте гармонического возбуждения .
Можно показать, что в этом случае сила
упругости R(t)
в связи поглотителя в любой момент
времени равна и противоположно направлена
действующей на объект гармонической
силе F(t):
R0 sint = – F0 sin t.
В результате объект будет полностью освобожден от действия возбуждающей нагрузки на частоте .
Расширение частотного диапазона воздействия динамического виброгасителя достигается увеличением затухания путем демпфирования упругой связи (рис. 3.3.25). Для поглощения энергии колебаний в качестве упругого элемента в гасителе использована резиновая втулка, которая разделяет объект с моментом инерции (J) и гаситель с моментом инерции (Jг).
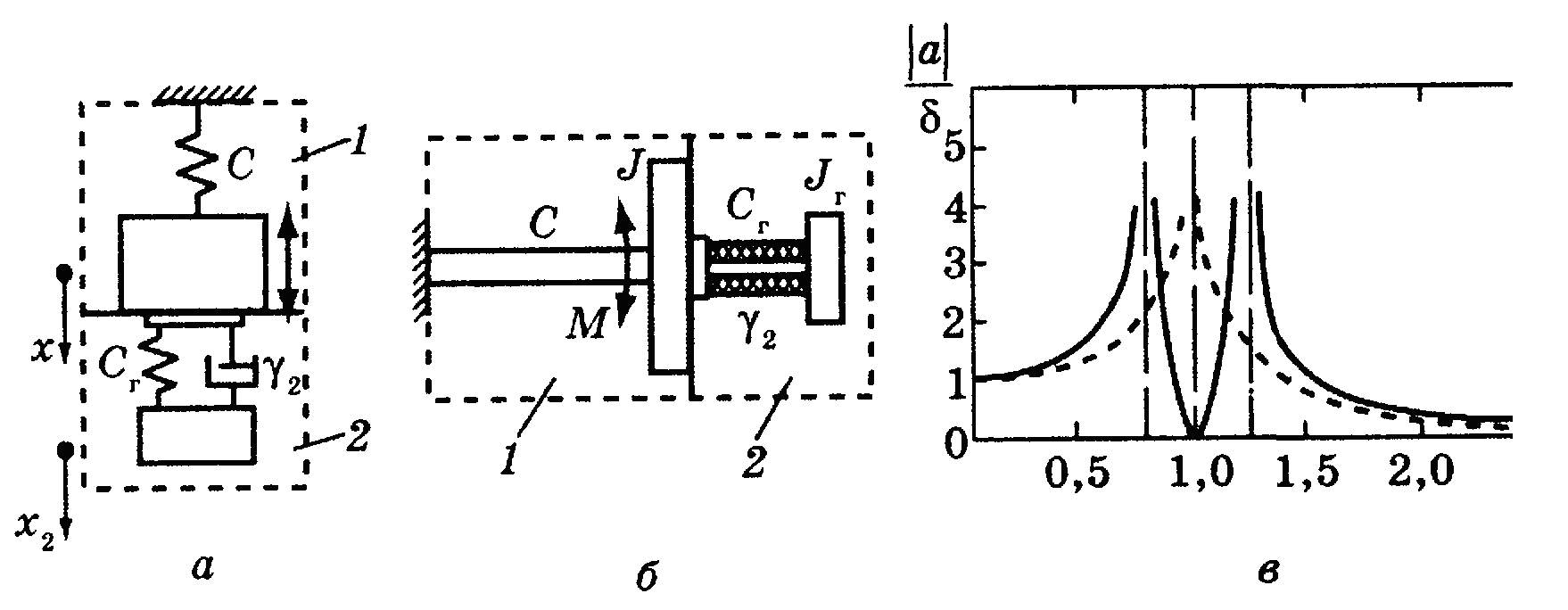
Рис. 3.3.25. Динамический гаситель крутильных колебаний с трением:
а – расчетная схема; б – конструкция; в – амплитудно-частотная характеристика
А ктивные
динамические гасители колебаний, кроме
перечисленных выше элементов, включают
элементы немеханической природы с
независимым источником энергии. В
простейшем случае (рис. 3.3.26) это
управляемый электромагнитный виброгаситель
1, в котором изменение характеристик
колебательной системы 2 осуществляется
посредством управления электромагнитными
элементами по сигналам обратной связи
от вибродатчика 3. Его амплитудно-частотная
характеристика изображена на рис. 3.3.27.
Существует большое разнообразие типов
сложных активных систем виброгашения,
в том числе пневматических и гидравлических,
в которых широкополосное динамическое
воздействие на объект формируется в
реальном времени с учетом его вибрационных
характеристик на основе поступающего
по обратной связи сигнала.
ктивные
динамические гасители колебаний, кроме
перечисленных выше элементов, включают
элементы немеханической природы с
независимым источником энергии. В
простейшем случае (рис. 3.3.26) это
управляемый электромагнитный виброгаситель
1, в котором изменение характеристик
колебательной системы 2 осуществляется
посредством управления электромагнитными
элементами по сигналам обратной связи
от вибродатчика 3. Его амплитудно-частотная
характеристика изображена на рис. 3.3.27.
Существует большое разнообразие типов
сложных активных систем виброгашения,
в том числе пневматических и гидравлических,
в которых широкополосное динамическое
воздействие на объект формируется в
реальном времени с учетом его вибрационных
характеристик на основе поступающего
по обратной связи сигнала.
Демпферы (поглотители колебаний) с вязким и сухим трением, в которых вибрационная энергия присоединенного объекта преобразуется в работу сил трения, широко используются для гашения как продольных, так и крутильных колебаний любой зависимости от времени и любой частоты.
Н а
рис. 3.3.28 показана конструктивная схема
демпфера вязкого трения для крутильных
колебаний. Втулка 1, жестко связанная
с кожухом 2 поглотителя, насажена
на вал 5, крутильные колебания
которого необходимо погасить. Внутри
кожуха находится маховик 3, могущий
проскальзывать на подшипнике скольжения
4 относительно втулки 1. Небольшой
зазор между кожухом и маховиком заполнен
вязкой жидкостью. Энергия колебаний
вала поглощается силами трением маховика
в подшипнике скольжения и в вязкой
жидкости. Амплитудно-частотная
характеристика демпфера приведена на
рис. 3.3.29.
а
рис. 3.3.28 показана конструктивная схема
демпфера вязкого трения для крутильных
колебаний. Втулка 1, жестко связанная
с кожухом 2 поглотителя, насажена
на вал 5, крутильные колебания
которого необходимо погасить. Внутри
кожуха находится маховик 3, могущий
проскальзывать на подшипнике скольжения
4 относительно втулки 1. Небольшой
зазор между кожухом и маховиком заполнен
вязкой жидкостью. Энергия колебаний
вала поглощается силами трением маховика
в подшипнике скольжения и в вязкой
жидкости. Амплитудно-частотная
характеристика демпфера приведена на
рис. 3.3.29.
Д
 емпферы
с сухим трением имеют наибольшее
распространение вследствие простоты
конструкции и малых габаритов. На рис.
3.3.30 показана конструктивная схема
демпфера крутильных колебаний с сухим
трением. Ступица 4, установленная
неподвижно на валу 5, жестко связана
с фрикционными дисками 3, прижатыми
к маховику 1 пружинами 2. Регулировка
величины сил сухого трения между
фрикционными дисками и маховиком
осуществляется с помощью пружин. При
крутильных колебаниях вала маховик
проскальзывает относительно ступицы,
что приводит к поглощению энергии силами
трения на фрикционных поверхностях.
емпферы
с сухим трением имеют наибольшее
распространение вследствие простоты
конструкции и малых габаритов. На рис.
3.3.30 показана конструктивная схема
демпфера крутильных колебаний с сухим
трением. Ступица 4, установленная
неподвижно на валу 5, жестко связана
с фрикционными дисками 3, прижатыми
к маховику 1 пружинами 2. Регулировка
величины сил сухого трения между
фрикционными дисками и маховиком
осуществляется с помощью пружин. При
крутильных колебаниях вала маховик
проскальзывает относительно ступицы,
что приводит к поглощению энергии силами
трения на фрикционных поверхностях.
Оптимальный момент сил сухого трения, обеспечивающий максимальное поглощение энергии за цикл, в этом случае равен
![]() ,
,
где Jm – момент инерции маховика, кгм2;
– круговая частота колебаний, с–1;
0 – амплитуда угловых колебаний без демпфера, рад.