

Тема 13. Динамика относительного движения материальной точки
П усть
материальная точка массой m движется
по отношению к системе отсчета
усть
материальная точка массой m движется
по отношению к системе отсчета
![]() ,
которая, в свою очередь, обладает
некоторым движением по отношению к
инерциальной (неподвижной) системе
отсчета охуz
(рис.3.1.92). Обозначим через
равнодействующую приложенных к точке
активных сил, через
– равнодействующую реакций связей.
,
которая, в свою очередь, обладает
некоторым движением по отношению к
инерциальной (неподвижной) системе
отсчета охуz
(рис.3.1.92). Обозначим через
равнодействующую приложенных к точке
активных сил, через
– равнодействующую реакций связей.
На основании 2-го закона Ньютона
![]() ,
,
где – абсолютное ускорение точки.
На основании теоремы Кориолиса
,
тогда
![]() или
или
![]() .
.
Векторы
(–m![]() )
и (–m
)
и (–m![]() )
называются соответственно переносной
и кориолисовой силами инерции.
Введя обозначение
)
называются соответственно переносной
и кориолисовой силами инерции.
Введя обозначение
![]() и
и
![]() ,
получаем
,
получаем
![]() .
(3.1.110)
.
(3.1.110)
Выражение (3.1.110) представляет собой основное уравнение динамики относительного движения материальной точки. В случае непоступательного переносного движения относительное движение материальной точки можно рассматривать как абсолютное, если к действующим на точку силам присоединить переносную и кориолисову силы инерции.
Рассмотрим некоторые частные случаи.
1.
Подвижная система отсчета движется
поступательно: ωe
= 0,
=
0,
![]() = 0. Уравнение (3.1.110) примет вид
= 0. Уравнение (3.1.110) примет вид
![]() .
(3.1.111)
.
(3.1.111)
2.
Подвижная система отсчета движется
поступательно, прямолинейно и равномерно
=
0,
![]() = 0 и
= 0 и
![]() ,
,
![]() .
Уравнение (3.1.110) примет вид
.
Уравнение (3.1.110) примет вид
![]() ,
(3.1.112)
,
(3.1.112)
т.е. основное уравнение динамики имеет такой же вид, как в случае неподвижной системы отсчета. Иными словами, рассматриваемая система отсчета является инерциальной.
Отсюда вытекает принцип относительности классической механики, установленный Галилеем: «В системе отсчета, движущейся поступательно, прямолинейно и равномерно относительно неподвижной системы, все механические явления происходят так же, как и в неподвижной системе, в силу чего никакими механическими экспериментами такое движение системы отсчета не может быть обнаружено».
3. Точка по отношению к подвижным осям
находится в покое:
![]() и
и
![]() ,
а, следовательно, и
,
а, следовательно, и
![]() Уравнение (3.1.110) примет вид
Уравнение (3.1.110) примет вид
![]() .
(3.1.113)
.
(3.1.113)
Таким обpазом, в случае, когда материальная точка находится в состоянии относительного покоя, геометpическая сумма фактически пpиложенных к точке сил и пеpеносной силы инеpции pавна нулю
Случаи относительного покоя, пеpегpузки, испытываемые пилотом. Интересным примером относительного равновесия является равновесие пилота в системе отсчета, связанной с ВС. Определим перегрузку, действующую на пилота в различных режимах полета.
Перегрузкой, испытываемой пилотом в полете, называют векторную физическую величину, равную отношению вектора силы, с которой кресло и привязные ремни действуют на пилота в полете, к произведению массы пилота на ускорение свободного падения:
![]() .
.
В полете на пилота фактически действуют только две силы: реакция со стороны кресла и привязных ремней, а также сила тяжести.
Таким образом, условие относительного равновесия для данного случая может быть записано в следующем виде:
,
откуда, учитывая, что
![]() и
и
![]() ,
находим
,
находим
![]() .
.
Переносное ускорение можно принять равным ускорению центра масс самолета, которое найдем из основного закона динамики
mc
![]() =
=![]() ,
,
где – сила тяги двигателя,
– подъемная сила,
– сила лобового сопротивления,
![]() – сила бокового давления.
– сила бокового давления.
Тогда
=![]() ;
;
![]() .
(3.1.114)
.
(3.1.114)
Разложим перегрузку по осям ВС на три
составляющие: продольную (![]() ),
направленную по продольной оси ВС,
нормальную
(ny = Y
/Gc), направленную
по главной нормали к траектории движения
ВС, и боковую (nz=
Z /Gc).
),
направленную по продольной оси ВС,
нормальную
(ny = Y
/Gc), направленную
по главной нормали к траектории движения
ВС, и боковую (nz=
Z /Gc).
Б оковая
составляющая nz
обычно равна нулю, так как в нормальных
условиях ВС летит без бокового скольжения.
Продольная составляющая nх
мала, так как разность между силой тяги
двигателя и силой лобового сопротивления
обычно мала, за исключением непродолжительных
режимов ускорения после включения
форсажа. Следовательно, основной
составляющей перегрузки в полете при
выполнении пилотажных фигур является
нормальная составляющая перегрузки,
равная отношению подъемной силы к силе
тяжести.
оковая
составляющая nz
обычно равна нулю, так как в нормальных
условиях ВС летит без бокового скольжения.
Продольная составляющая nх
мала, так как разность между силой тяги
двигателя и силой лобового сопротивления
обычно мала, за исключением непродолжительных
режимов ускорения после включения
форсажа. Следовательно, основной
составляющей перегрузки в полете при
выполнении пилотажных фигур является
нормальная составляющая перегрузки,
равная отношению подъемной силы к силе
тяжести.
В полете можно на некоторое время создать такой режим, называемый состоянием динамической невесомости, когда перегрузка, действующая на пилота, равна нулю. Для этого необходимо силу лобового сопротивления уравновесить силой тяги двигателя, а с помощью рулей при выполнении горки выдержать режим нулевой подъемной силы.
Рассмотрим криволинейное движение ВС и перегрузки, действующие при этом.
При движении по дуге радиусом R, расположенной в вертикальной плоскости, ВС имеет ускорение, и, следовательно, силы и не уравновешены. Но, приложив силы инерции, мы сможем использовать уравнения равновесия (рис. 3.1.93).
Приложим
![]() и составим уравнение равновесия в
проекции на ось OY:
и составим уравнение равновесия в
проекции на ось OY:
Y – mg
– Фn = 0 или Y
= mg + m![]() ,
,
разделим на mg, пролучим
![]()
или
ny
= 1 +
![]() .
(3.1.115)
.
(3.1.115)
Таким образом, перегрузка возрастает с увеличением скорости и уменьшением радиуса траектории полета.
Перегрузка ny не равна единице и при разворотах ВС. Правильный разворот выполняют по дуге окружности в горизонтальной плоскости с постоянной скоростью. И в этом случае силы, действующие на ВС, не уравновешены (рис. 3.1.94).
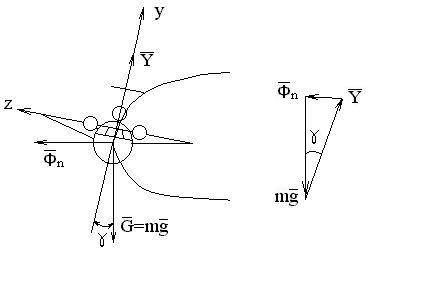
Рис. 3.1.94
Составим условие равновесия сходящихся сил, где угол γ равен углу крена ВС. Решая треугольник сил, получим
cosγ =![]() ,
,
![]()
тогда
![]() и
и
![]() .
(3.1.116)
.
(3.1.116)
Как следует из формулы (3.1.116), перегрузка ny увеличивается с увеличением крена, который, в свою очередь, зависит от скорости ВС и радиуса разворота. Например, при крене γ = 10° ny = 1,01, при γ = 30° ny =1,16, при γ = 60° ny = 2. Для пассажирских самолетов крен более 30° не допускается. Максимально допустимая перегрузка ограничена, исходя из соображений прочности самолета. Как правило, она не превышает nmax = 2,5–2,8.