

Тема 3. Кинематический анализ механизмов
Кинематический анализ. Кинематическое исследование механизма состоит в изучении движения звеньев без учета сил, действующих на эти звенья, при заданном движении ведущего звена.
Кинематический анализ выполняется по кинематической схеме механизма. Он состоит в определении кинематических характеристик:
перемещений звеньев и траекторий, описываемых характерными точками звеньев;
линейных скоростей и ускорений точек звеньев механизма;
угловых скоростей и угловых ускорений звеньев механизма.
Кинематический анализ позволяет установить соответствие кинематических параметров (перемещений, скоростей и ускорений) заданному закону движения механизма, а также получить исходные данные для выполнения динамического анализа. По полученным кинематическим характеристикам определяют инерционные нагрузки звеньев, кинетическую энергию механизма, закон движения ведущего и ведомых звеньев в функции времени.
Кинематическое исследование механизмов проводят графическими и аналитическими методами. Графическое определение кинематических параметров основано на геометрических построениях, погрешность результатов которых составляет 0,3–0,5 % по сравнению с аналитическими расчетами.
Графический метод нагляден и универсален, так как позволяет определять положения, скорости и ускорения звеньев механизма любой структуры. Метод построения планов скоростей и ускорений применяется при инженерных расчетах как при анализе, так и при синтезе механизмов. Графический метод построения кинематических диаграмм позволяет использовать при анализе заданные в виде графиков законы изменения кинематических параметров в функции обобщенных координат и t. Точность графических методов достаточна для выполнения технических расчетов. Графические методы не могут быть использованы, если требуется проводить расчеты с высокой точностью. Применение ЭВМ при аналитическом исследовании упрощает выполнение сложных и трудоемких вычислений.
При кинематическом исследовании различают абсолютное и относительное движения звеньев и кинематических пар механизма и соответствующие им кинематические характеристики.
Абсолютное движение – движение точки или тела относительно неподвижной системы координат, связанной с не подвижными стойкой или корпусом.
Относительное движение – движение точки или звена относительно подвижной системы координат, которая связана с каким-либо движущимся звеном. Движение подвижной системы координат относительно неподвижной системы координат называется переносным движением.
Перемещение (как скалярная величина) – мера пути, пройденного точкой или звеном за некоторое время: линейное перемещение (S) измеряется в метрах, угловое () – в градусах или радианах.
Угол в 1 рад соответствует центральному углу окружности, длина дуги которой равна ее радиусу. В окружности 2 таких отрезков, поэтому 1 рад = 360/(2) = 57,3°.
Скорость – основная кинематическая характеристика (векторная величина) – мера быстроты движения, характеризующая перемещение точки в рассматриваемый момент времени (в рассматриваемом положении) в данной системе отсчета. Линейная скорость (V) измеряется в м/с, угловая () – в с–1.
Ускорение (векторная величина) – мера быстроты изменения скорости в данный момент в данной системе отсчета. Размерность линейного ускорения а (м/с2), углового (с–2).
Из теоретической механики известна теорема сложения скоростей:
Вектор
абсолютной скорости
![]() точки В звена равен геометрической
сумме вектора скорости
точки В звена равен геометрической
сумме вектора скорости
![]() произвольно выбранной точки А
звена и вектора скорости
произвольно выбранной точки А
звена и вектора скорости
![]() во вращательном движении относительно
этой точки.
во вращательном движении относительно
этой точки.
Это уравнение для точки В звена (рис. 3.3.9, а) имеет вид
![]() .
.
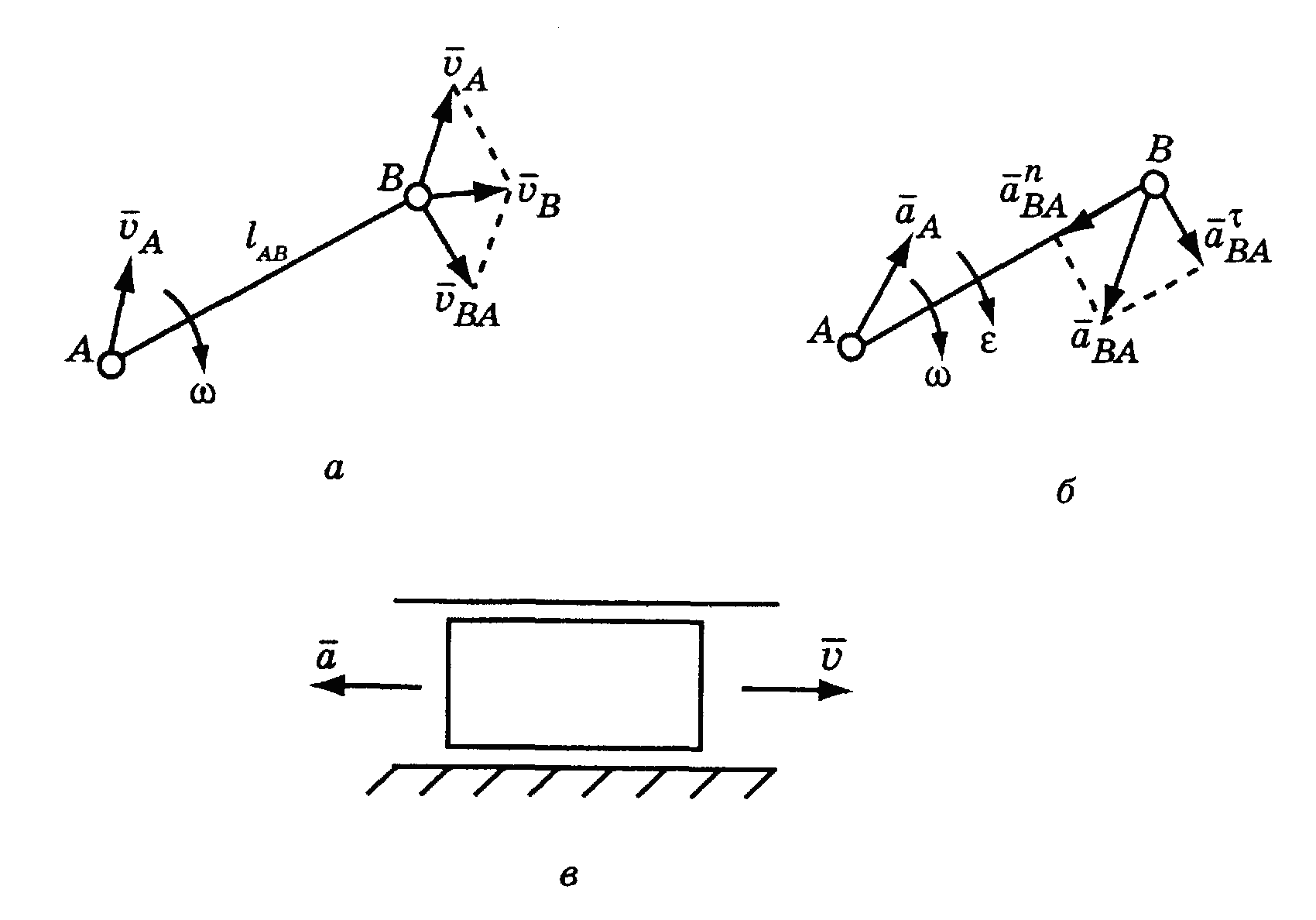
Рис. 3.3.9
Вектор
скорости
![]() известен по величине и направлению.
известен по величине и направлению.
Вектор
линейной скорости точки звена во
вращательном движении
![]() направлен в сторону движения звена
(по угловой скорости со звена) по
касательной к траектории, т.е.
перпендикулярно звену ВА (
направлен в сторону движения звена
(по угловой скорости со звена) по
касательной к траектории, т.е.
перпендикулярно звену ВА (![]() BА).
BА).
Вектор
абсолютного ускорения
![]() точки В звена равен геометрической
сумме вектора ускорения
точки В звена равен геометрической
сумме вектора ускорения
![]() произвольно выбранной точки А и
вектора ускорения
произвольно выбранной точки А и
вектора ускорения
![]() во вращательном движении относительно
этой точки (рис. 3.3.9, б).
во вращательном движении относительно
этой точки (рис. 3.3.9, б).
![]() ,
,
где
![]() – соответственно относительное
нормальное (центростремительное) и
касательное (тангенциальное) ускорения
во вращательном движении.
– соответственно относительное
нормальное (центростремительное) и
касательное (тангенциальное) ускорения
во вращательном движении.
Нормальное ускорение направлено по радиусу вращения точки к центру кривизны траектории (вдоль звена от точки В к точке А), а касательное ускорение направлено перпендикулярно звену АВ в сторону углового ускорения е звена (см. рис. 3.3.9, б).
Направление угловой скорости и углового ускорения совпадают при равноускоренном движении звена и противоположны друг другу при равнозамедленном движении.
При поступательном движении звена векторы абсолютных скоростей и абсолютных ускорений всех точек звена равны и направлены по касательной к траектории движения. Направление векторов скоростей совпадает с направлением движения, а для ускорений при ускоренном движении эти векторы направлены в сторону движения, при замедленном – в обратную сторону (рис. 3.3.9, в).
Планы положений механизма. Планом положений механизма называется графическое изображение кинематической схемы в выбранном масштабе, соответствующее заданному положению начального звена.
Планы строятся в заданном масштабе. При этом различают понятия «масштаб» и «масштабный коэффициент». Масштабом физической величины называют длину отрезка в миллиметрах, изображающую единицу измерения этой величины. Масштабным коэффициентом физической величины называют отношение численного значения физической величины к длине отрезка в миллиметрах, изображающего эту величину. Масштаб и масштабный коэффициент являются взаимно обратными величинами. Масштабные коэффициенты обозначают буквой с индексом, указывающим, к какой величине они относятся. Например, масштабный коэффициент длин (l) для плана механизма есть отношение какой-либо длины (lAB) в метрах к отрезку (АВ), изображающему эту длину на чертеже в миллиметрах:
![]() .
.
Рассмотрим построение планов механизма на примерах.
1. Шарнирный четырехзвенник (рис. 3.3.10). Кривошип ОА вращается с постоянной скоростью , поэтому положение точки А известно для любого момента времени (любого угла поворота звена ОА).

Рис. 3.3.10
Делим окружность радиуса ОА на несколько равных частей, например, на 6. Обозначим положения конца кривошипа точками А1, А2, …, А6.
Точка В (конец коромысла) движется по дуге окружности радиуса СВ. Проведем эту дугу из центра – точки С.
Радиусом, равным длине шатуна АВ, делаем из точек А1, A2, ... A6 засечки на дуге окружности.
Соединяем одноименные положения точек А1 и В1, А2 и В2, а также В1 и С1, В2 и С2. Получаем положения шатуна и коромысла за цикл движения, т. е. за один оборот кривошипа. Вращение коромысла против часовой стрелки соответствует положениям рабочего хода, по часовой стрелке – положениям холостого хода.
2. Кривошипно-ползунный механизм (рис. 3.3.11). Задаемся крайним положением кривошипа (кривошип и шатун располагаются на одной линии).
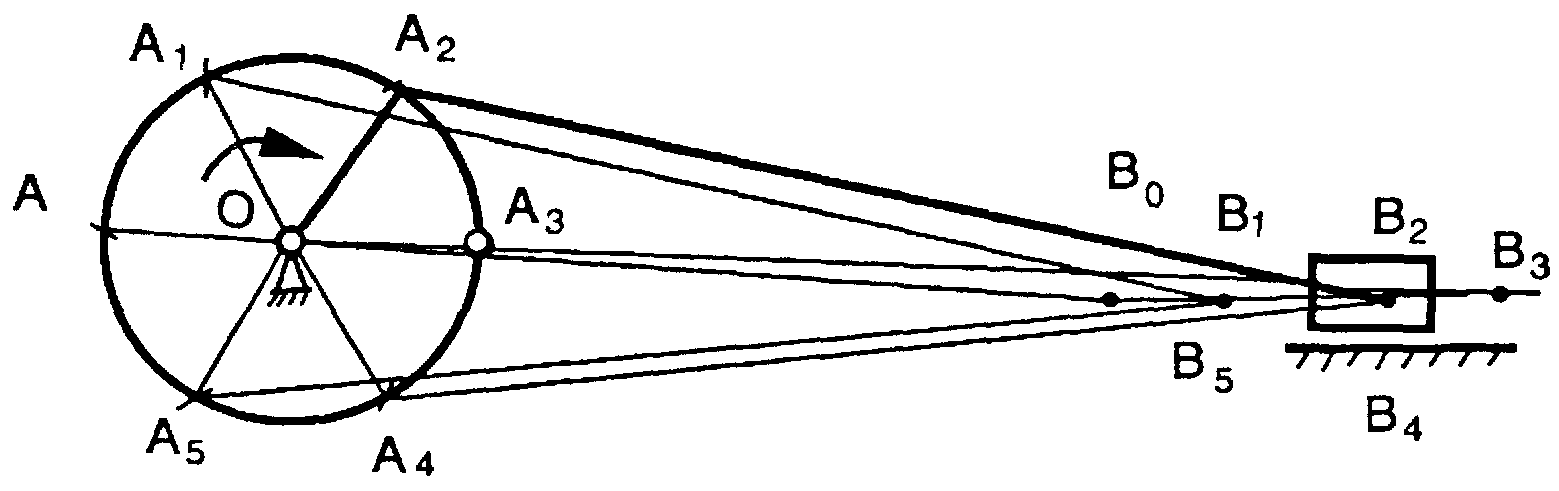
Рис. 3.3.11
Делим окружность радиуса ОА на равные части. Из точек деления (А1, А2, ...) делаем засечки на оси движения ползуна (В1, В2, ...) радиусом, равным длине шатуна. Найденные положения точки В определяют положение поршня (ползуна) на рабочем ходу – В1, В2, В3; на холостом ходу – В4, В5. Соединяем одноименные точки (А1 и B1, A2 и В2 и т.д.).
Планы скоростей плоских механизмов. Планом скоростей называют чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям различных точек механизма в данном положении.
Для построения плана скоростей необходимы исходные данные:
план механизма с указанием размеров;
угловая скорость начального звена.
Из теоретической механики известно, что любое движение плоского тела может рассматриваться как сумма двух движений: вращение относительно некоторой точки (полюса) и поступательное (переносное) движение полюса. Используя этот принцип, рассмотрим решение задач о скоростях точек звеньев, образующих пары 5-го класса.
Пример. Определение скоростей точек звена, входящего во вращательную пару с другим звеном (рис. 3.3.12).
П усть
заданы:
усть
заданы:
![]() – вектор скорости точки А (см. рис.
3.3.12, а); АВ
– угловая скорость звена АВ.
– вектор скорости точки А (см. рис.
3.3.12, а); АВ
– угловая скорость звена АВ.
Требуется определить: скорости точек В и С (VB, VС ).
В соответствии с теоремой сложения скоростей, абсолютная скорость (VB) точки равна геометрической сумме переносной (VA) и относительной (VВА) скоростей этой точки:
, (3.3.1)
где VBA = AB lAB – относительная скорость точки В во вращательном движении вокруг точки А; вектор VBA направлен перпендикулярно звену АВ (т. е. радиусу вращения).
2. Аналогично
![]() ,
(3.3.2)
,
(3.3.2)
где VCA = AB lAC; вектор этой скорости направлен перпендикулярно звену АС (VCA AC).
3. Построим векторные уравнения (3.3.1) и (3.3.2).
Выбираем произвольную точку р – полюс плана скоростей и откладываем в направлении вектора VA отрезок произвольной длины ра (см. рис. 3.3.12, б). При этом определяем значение масштабного коэффициента плана скоростей:
у = VА/ра. (3.3.3)
Строим вектор
![]() .
Из точки а проводим прямую,
перпендикулярную аb,
и откладываем отрезок аb
в масштабе, учитывая при этом направление
угловой скорости АВ:
.
Из точки а проводим прямую,
перпендикулярную аb,
и откладываем отрезок аb
в масштабе, учитывая при этом направление
угловой скорости АВ:
![]() .
(3.3.4)
.
(3.3.4)
Суммарный вектор – абсолютная скорость точки В – определится отрезком рb:
![]() .
(3.3.5)
.
(3.3.5)
Аналогично находим скорость точки с: из точки а в направлении, перпендикулярном ас, откладываем относительную скорость с учетом масштабного коэффициента:
ac = ABlAC /V. (3.3.6)
Соединяем полюс с полученной на плане скоростей точкой с. Измерив на плане величину отрезка рс, находим значение абсолютной скорости точки с:
![]() (3.3.7)
(3.3.7)
Скорость точки С можно определить, приняв движение точки в за переносное:
![]() (3.3.8)
(3.3.8)
На плане скоростей вектор pb изображает скорость точки в; относительная скорость Vcb – это вектор bc , направленный перпендикулярно стороне звена ВС (см. рис. 3.3.12, а). Соединив точки b и с, получим на плане скоростей графическое изображение уравнения (3.3.8).
Сравнивая треугольники ABC и аbс на рис. 3.3.12, можно заметить, что эти фигуры подобны и сходственны, т. к. стороны их взаимно перпендикулярны и отрезки ab, ас, bс пропорциональны длинам сторон звена АВ, АС, ВС.
Выводы:
1. На плане скоростей лучи, выходящие из полюса, изображают абсолютные скорости точек звена, а отрезки, соединяющие концы лучей, – относительные скорости соответствующих точек.
2. Векторы относительных скоростей направлены на плане скоростей к первой букве индекса. Например, VCB – скорость точки С относительно В. На плане скоростей читается наоборот: отрезок bc , а вектор направлен к точке с.
3. Векторы относительных скоростей точек жесткого звена образуют на плане скоростей фигуру, подобную этому звену, повернутую на 90° в направлении угловой скорости звена.
Последний вывод называется принципом подобия в плане скоростей и позволяет определить скорость любой точки звена графически, если известны скорости хотя бы двух точек этого звена.
Планы ускорений плоских механизмов. Чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в данном положении, называется планом ускорений.
Рассмотрим решение двух задач об определении ускорений точек звеньев, образующих кинематические пары 5-го класса, аналогично решению задач о скоростях.
Пример. Определите ускорение точек звена, входящего во вращательную пару (рис. 3.3.13).
П ри
построении плана ускорений считается,
что все скорости известны, т. е. план
скоростей механизма для данного положения
уже построен.
ри
построении плана ускорений считается,
что все скорости известны, т. е. план
скоростей механизма для данного положения
уже построен.
– ускорение точки А;
![]() – угловое ускорение звена ABC.
– угловое ускорение звена ABC.
Решение.
1.
Абсолютное ускорение точки В
складывается из переносного ускорения
(
)
и относительного ускорения (![]() )
во вращательном движении точки В
вокруг А
(см. рис. 3.3.13, а):
)
во вращательном движении точки В
вокруг А
(см. рис. 3.3.13, а):
![]() .
(3.3.9)
.
(3.3.9)
2. Поскольку относительное движение вращательное, выражение (3.3.9) можно записать в виде
![]() ,
(3.3.10)
,
(3.3.10)
где
![]() – нормальное ускорение в относительном
движении, направленное по радиусу
вращения (АВ) к центру вращения
(точке А);
– нормальное ускорение в относительном
движении, направленное по радиусу
вращения (АВ) к центру вращения
(точке А);
![]() – касательное ускорение в относительном
движении, направленное перпендикулярно
радиусу вращения.
– касательное ускорение в относительном
движении, направленное перпендикулярно
радиусу вращения.
3. Построим уравнение (3.3.10) в виде суммы векторов (см. рис. 3.3.13, б). Выбираем точку – плюс плана ускорений. Откладываем из полюса вектор отрезка произвольной длины а, направленного параллельно вектору . Определяем масштабный коэффициент:
а = аА/а. (3.3.11)
Из точки а откладываем в направлении к центру вращения с учетом масштаба вектор нормального ускорения (anBA). Величина отрезка an определяется соотношением
![]() .
(3.3.12)
.
(3.3.12)
От полученной точки n в направлении, перпендикулярном АВ, откладываем отрезок nb, изображающий в масштабе касательную, составляющую относительного ускорения:
![]() .
(3.3.13)
.
(3.3.13)
Направление
вектора nb определяется
с учетом направления углового ускорения
![]() (в данном примере – вниз).
(в данном примере – вниз).
Соединяя точку п с точкой b, получаем результирующий вектор, который изображает абсолютное ускорение точки В (см. уравнение (3.3.10)):
![]() .
(3.3.14)
.
(3.3.14)
Аналогично строятся векторные уравнения для точки С (см. рис. 3.3.13):
![]() ;
(3.3.15)
;
(3.3.15)
![]() .
(3.3.16)
.
(3.3.16)
4. Определим значения полных относительных ускорений:
![]() .
(3.3.17)
.
(3.3.17)
5. С учетом известных из теоретической механики формул (см. значения величин, входящих в уравнение (3.3.10))
![]() .
(3.3.18)
.
(3.3.18)
Аналогично
![]() ;
(3.3.19)
;
(3.3.19)
![]() .
(3.3.20)
.
(3.3.20)
6. Определим тангенс угла, определяющего направление полного относительного ускорения (см. рис. 3.3.12, а):
![]() .
(3.3.21)
.
(3.3.21)
Из формулы (3.3.21) следует, что tg не зависит от того, какая точка звена рассматривается, и одинаков для всех относительных ускорений.
Из выражений (3.3.18) – (3.3.21) следует, что относительные ускорения точек звена ABC пропорциональны длинам сторон и повернуты на один и тот же угол. Следовательно, abc в плане ускорений и АВС (жесткое звено) подобны и сходственны.
Этим определяется принцип подобия в плане ускорений.
Векторы относительных ускорений точек жесткого звена образуют на плане ускорений фигуру, подобную этому звену и повернутую относительно его на угол (180° – ) в направлении углового ускорения.
Зная относительные ускорения хотя бы двух точек звена, можно определить ускорение любой точки этого звена, пользуясь принципом подобия.